Clear Sky Science · pt
Integração do Swin-T simplificado com EFS-Net modificado para segmentação de dutos submarinos guiada por atenção em ambientes marinhos complexos
Por que observar o leito marinho importa
Ocultas sob as ondas, vastas redes de tubulações transportam petróleo, gás e cabos de energia dos quais as sociedades modernas dependem. Se esses dutos submarinos racharem, corroerem ou se deslocarem, o resultado pode ser paralisações dispendiosas e poluição severa. Hoje, grande parte da inspeção é feita por operadores humanos que revisam horas de vídeo turvo proveniente de robôs subaquáticos. Este artigo apresenta um novo sistema de inteligência artificial (IA) capaz de identificar automaticamente dutos em imagens subaquáticas difíceis, mesmo quando estão pouco iluminados, poluídos por “neve marinha” ou parcialmente enterrados na areia. Esse avanço rumo à inspeção automatizada e confiável pode tornar a energia offshore e a infraestrutura mais seguras e baratas de manter.
Enxergando com clareza em um mundo turvo
Imagens subaquáticas são notoriamente difíceis para computadores interpretarem. A luz se espalha rapidamente com a profundidade, as cores tendem a deslocar-se para o verde e o azul, e partículas em suspensão criam névoa e pontos semelhantes a neve. Técnicas clássicas de imagem, que dependem de contornos nítidos e contraste limpo, costumam falhar quando o duto está coberto de areia, oculto por vegetação ou borrado por névoa. O aprendizado profundo melhorou a situação, e várias redes neurais populares já conseguem detectar tubulações em conjuntos de dados específicos. Ainda assim, esses sistemas geralmente se especializam em um tipo de condição de água ou configuração de câmera. Ao enfrentar um ambiente novo — água, iluminação ou fundo diferentes — sua precisão cai acentuadamente. O desafio central é construir um modelo que seja ao mesmo tempo preciso e adaptável, sem deixar de ser eficiente o bastante para rodar em sistemas de inspeção do mundo real.
Uma abordagem de dois cérebros para imagens subaquáticas
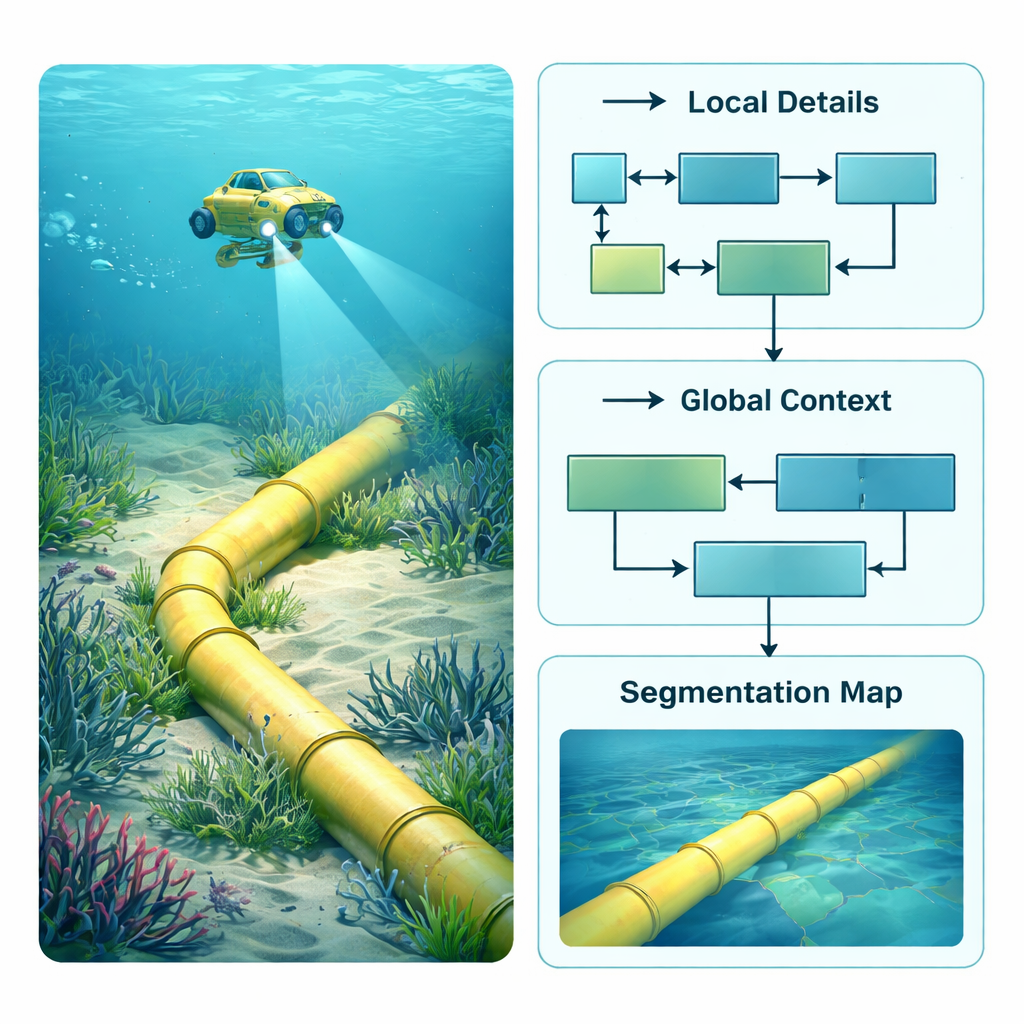
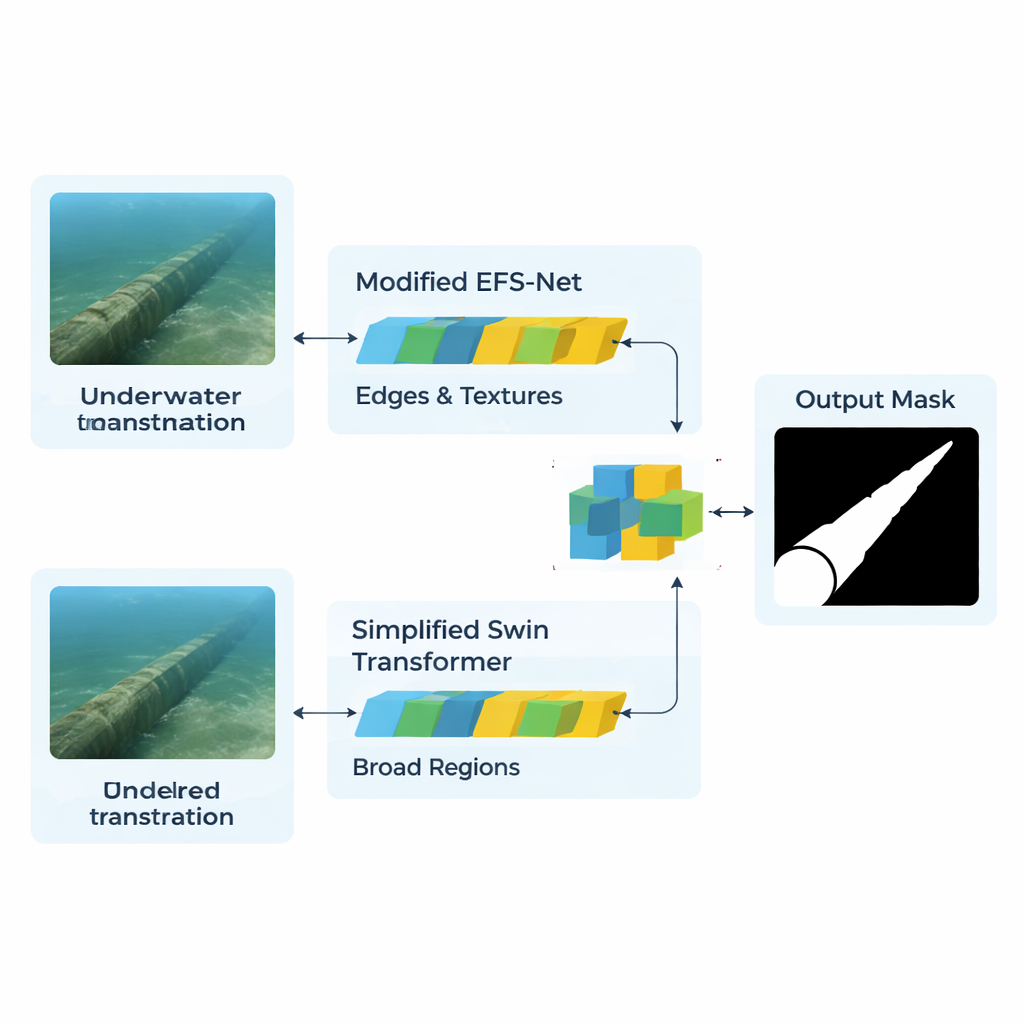
Os autores enfrentam isso construindo uma arquitetura híbrida de IA que combina duas “formas de ver” muito diferentes. Um ramo, baseado em uma versão simplificada do Swin Transformer, atua como um observador grande-angular. Ele escaneia todo o quadro para entender padrões em grande escala, como a rota geral de um duto pelo leito marinho. O segundo ramo, adaptado de um modelo chamado EFS-Net e respaldado por uma espinha dorsal EfficientNet, comporta-se como uma lupa. Concentra-se em detalhes finos — bordas, texturas e estruturas delgadas que revelam onde o duto começa e onde termina a areia ou a vegetação. Ambos os ramos processam as mesmas imagens redimensionadas e as convertem em mapas de características internas que descrevem o que a rede considera estruturas relevantes em cada região da imagem.
Permitindo que a atenção decida o que importa
Simplesmente empilhar as saídas desses dois ramos criaria um emaranhado de informações redundantes. Em vez disso, o modelo usa um mecanismo de “atenção” para decidir, pixel por pixel, quais detalhes merecem foco. Um módulo de atenção cruzada com três cabeças compara as características do ramo focado em detalhes com as do ramo focado em contexto. Essencialmente, o ramo de detalhe faz perguntas direcionadas — “Essa borda faz parte de um duto?” — enquanto o ramo de contexto fornece pistas globais — “Uma linha nesta posição e direção faz sentido como parte de um duto?” Um passo adicional de refinamento, chamado CBAM, reforça ainda mais o sinal das regiões prováveis de duto e atenua ruídos de fundo, como rochas, algas ou partículas em suspensão. Em seguida, uma rede decodificadora reconstrói gradualmente uma máscara em tamanho real que marca cada pixel como duto ou não.
Colocando o sistema à prova
Para avaliar se esse projeto funciona na prática, os pesquisadores reuniram um grande e exigente conjunto de dados chamado HOMOMO. Ele contém mais de 120.000 imagens coloridas reais de dutos no leito marinho registradas ao longo de 1,2 quilômetros de tubulação sob condições variadas e frequentemente hostis: baixa luminosidade, névoa marítima, “neve” em suspensão, dunas de areia e denso crescimento vegetal. Treinaram seu modelo em parte dessa coleção e depois o compararam com sistemas amplamente usados, como UNet, DeepLab, SwinUNet, TransUNet, Mask2Former e diversas versões do detector de objetos YOLO. No HOMOMO, seu modelo híbrido segmentou corretamente os pixels de duto com uma interseção-média sobre união (mean IoU) de cerca de 98%, substancialmente superior ao melhor método concorrente. Igualmente importante, ao ser testado — sem retreinamento — em duas fontes de imagem muito diferentes, um conjunto sintético do Roboflow e filmagens reais do YouTube, o modelo manteve bom desempenho, mostrando que pode lidar com câmeras e condições de água novas.
O que isso significa para o oceano real
Para não especialistas, a conclusão é que esse sistema de IA pode contornar, de forma confiável, a tarefa de delinear dutos submarinos em quadros de vídeo que são rápidos demais e inconsistentes para métodos convencionais. Ao combinar uma visão global da cena com um olhar afiado para bordas e texturas, e ao usar atenção para fundir essas perspectivas, o modelo alcança alta precisão sem exigir poder computacional massivo. Em termos práticos, essa ferramenta poderia ajudar robôs autônomos a monitorar continuamente longos trechos de infraestrutura submarina, sinalizando possíveis danos ou enterramentos para revisão humana. Embora ainda tenha dificuldades com dutos extremamente finos ou completamente ocultos, a abordagem representa um passo importante rumo a inspeções mais seguras e automatizadas da tubulação oculta que sustenta redes modernas de energia e comunicação.
Citação: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
Palavras-chave: dutos submarinos, segmentação de imagem, aprendizado profundo, inspeção marinha, redes transformer