Clear Sky Science · pt
Soluções quadrado-integráveis e estabilidade de uma equação estocástica integro-diferencial de segunda ordem
Por que o passado e a aleatoriedade importam para sistemas projetados
Muitos dispositivos modernos — desde braços robóticos flexíveis até pontes com amortecimento de vibrações — não respondem apenas ao que está acontecendo no momento. Seus movimentos são moldados por movimentos anteriores, sinais de sensores com atraso e vibrações aleatórias sempre presentes do ambiente. Este artigo coloca uma questão fundamental sobre tais sistemas: mesmo quando são afetados por ruído e conservam memória do passado, podemos garantir que seus movimentos permaneçam sob controle em vez de crescerem sem limite?
Uma nova forma de acompanhar sistemas ruidosos com memória
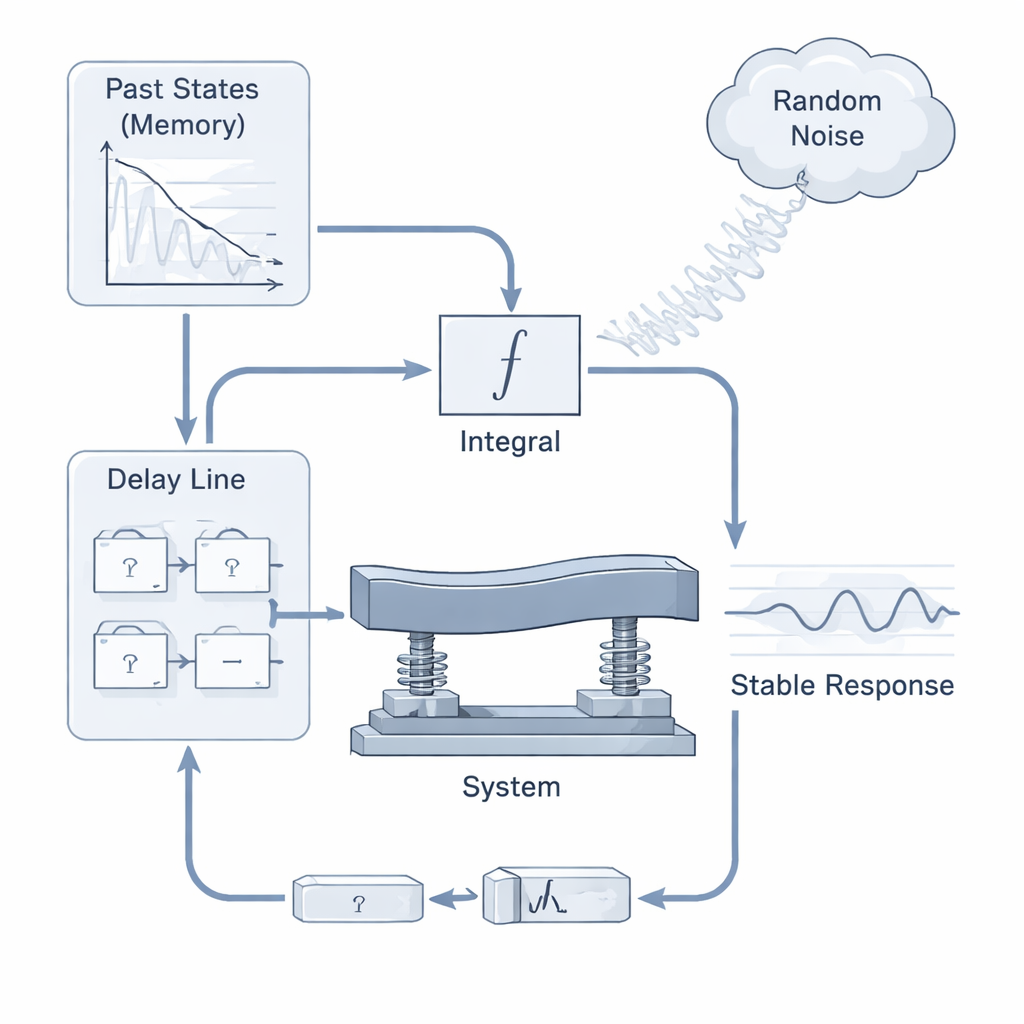
Os autores estudam uma família ampla de modelos matemáticos chamada equações estocásticas integro-diferenciais de segunda ordem com atrasos. Em termos simples, essas equações descrevem como uma grandeza, como o deslocamento, evolui quando depende de sua posição e velocidade atuais, de sua história no tempo, de realimentação com atraso e de flutuações aleatórias. Esse tipo de descrição é natural para materiais viscoelásticos, amortecedores de vibração e sistemas mecânicos ou mecatrônicos com controle em malha fechada. Uma dificuldade central é que as ferramentas tradicionais muitas vezes tratam apenas uma complicação por vez — ou a aleatoriedade, ou os atrasos, ou a memória — mas não as três juntas. Aqui, os autores constroem uma ferramenta analítica mais poderosa, um funcional de Lyapunov–Krasovskii, cuidadosamente projetado para capturar o efeito combinado do ruído, de atrasos temporais variáveis e dos termos de memória.
Manter o movimento limitado apesar de atrasos e ruído
Usando esse novo funcional, o artigo deriva condições sob as quais os sistemas modelados se comportam bem a longo prazo. Especificamente, os autores mostram que, se certos limites naturais são impostos sobre a intensidade da realimentação, do amortecimento e dos efeitos de memória, então toda solução permanece limitada ao longo do tempo. Além disso, o estado do sistema tende a se estabilizar em direção a uma posição de repouso em um sentido estocástico: perturbações aleatórias podem causar oscilações de curto prazo, mas estas não se acumulam em um movimento descontrolado. Essa propriedade é chamada de estabilidade assintótica estocástica. As condições são expressas por meio de desigualdades simples sobre os coeficientes que descrevem amortecimento, rigidez, tamanho do atraso e intensidade do ruído aleatório. Em princípio, engenheiros podem usar essas desigualdades como diretrizes de projeto para garantir operação segura.
Movimento quadrado-integrável e controle de energia
Além de mostrar que os movimentos permanecem limitados, os autores provam uma propriedade mais forte envolvendo o que chamam de quadrado-integrabilidade. Em linguagem mais familiar, isso significa que, se se observa a energia total acumulada do sistema — composta pelo quadrado do deslocamento e pelo quadrado da sua taxa de variação — essa energia permanece finita ao longo de todo o futuro do movimento. Energia acumulada finita implica que, em média, as oscilações tendem a desaparecer em vez de persistir indefinidamente. Matematicamente, isso é estabelecido mostrando que o funcional de Lyapunov–Krasovskii decresce ao longo das trajetórias do sistema rápido o bastante para que a integral do movimento ao quadrado convirja. Esse resultado conecta o funcional abstrato diretamente a uma grandeza fisicamente significativa, análoga à energia.
Testando a teoria com simulações
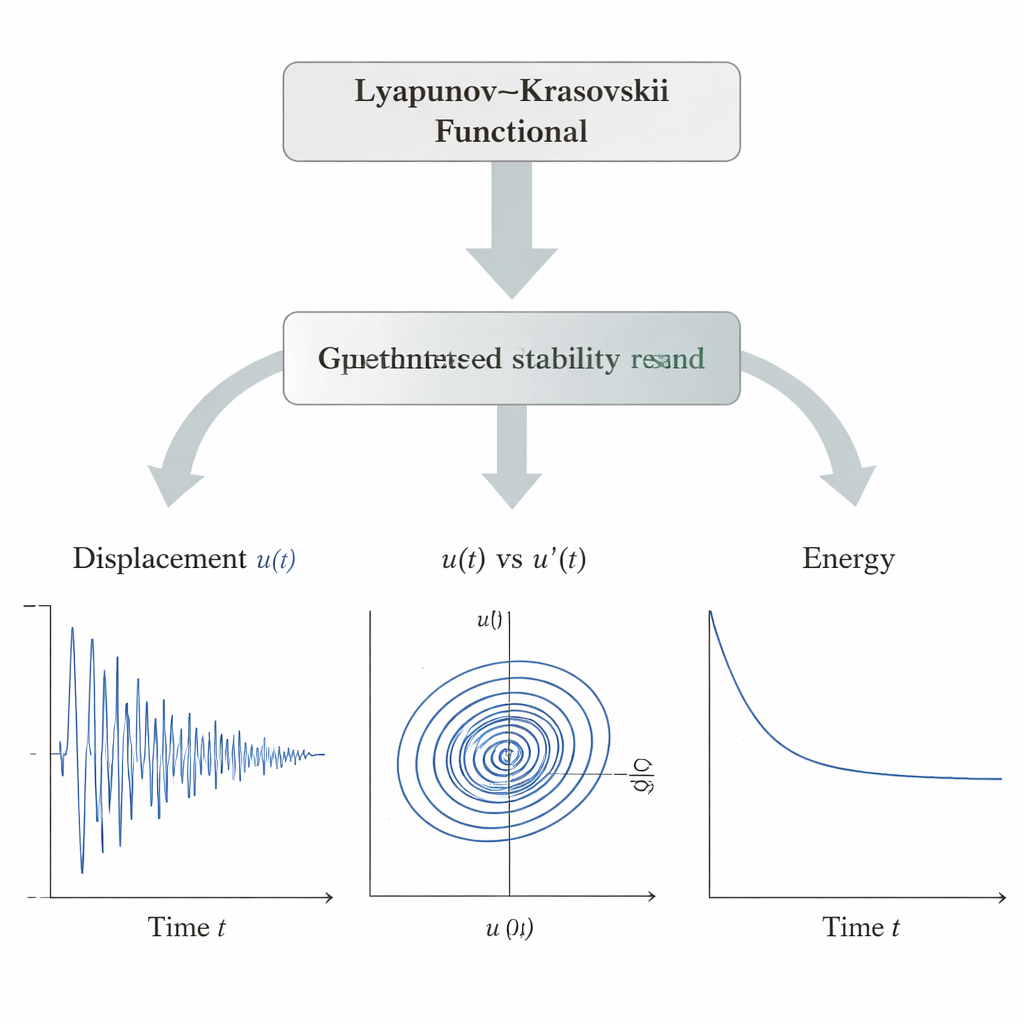
Para ilustrar os resultados abstratos, os autores simulam dois sistemas-modelo detalhados que se encaixam em seu quadro geral. Usando uma combinação do método de Euler–Maruyama para a parte aleatória e quadratura numérica para os integrais de memória, eles geram trajetórias exemplares ao longo do tempo. Os deslocamentos simulados exibem uma fase transitória inicial com oscilações aleatórias perceptíveis, para depois se estabilizarem em pequenas flutuações limitadas em torno do estado de repouso. Gráficos de fase mostram curvas em espiral que permanecem confinadas a uma região limitada, e curvas de energia calculadas decrescem e se mantêm limitadas. Esses experimentos numéricos confirmam que as condições teóricas de estabilidade e quadrado-integrabilidade de fato preveem movimentos realistas e bem comportados, mesmo quando atrasos e forças aleatórias estão presentes.
O que isso significa para sistemas do mundo real
Para um leitor leigo, a principal mensagem é que o artigo oferece uma forma rigorosa de certificar que sistemas complexos, com atrasos e sujeitos a ruído, não irão divergir descontroladamente. Ao construir um tipo novo de medida análoga à energia que leva em conta tanto a memória quanto a aleatoriedade, os autores mostram quando as oscilações permanecem limitadas e quando a energia total se mantém finita. Isso avança as bases matemáticas por trás do projeto de dispositivos de controle de vibração, estruturas mecânicas flexíveis e outras tecnologias nas quais realimentação atrasada e perturbações aleatórias são inevitáveis. As mesmas ideias podem orientar trabalhos futuros em áreas tão diversas quanto regulação biológica, dinâmicas econômicas e controle em rede, sempre que passado e acaso juntos influenciam a evolução do sistema.
Citação: Oudjedi-Damerdji, L.F., Meziane, M., Djidel, O. et al. Square integrable solutions and stability of a second-order stochastic integro-differential equation. Sci Rep 16, 7158 (2026). https://doi.org/10.1038/s41598-026-37970-5
Palavras-chave: estabilidade estocástica, equações diferenciais com atraso, métodos de Lyapunov, sistemas integro-diferenciais, controle de vibrações