Clear Sky Science · pt
Análise reconfigurável e otimização do espaço de trabalho de robô paralelo modular suspenso por cabos
Robôs que Viajam por Trilhos Invisíveis
Imagine um robô que desliza uma câmera pesada por um estádio, eleva materiais de construção em um canteiro, ou guia um aparelho de reabilitação ao redor de um paciente, tudo enquanto está suspenso por cabos em vez de se mover sobre braços rígidos. Este artigo apresenta um novo tipo de robô suspenso por cabos cuja estrutura pode ser remodelada sob demanda, permitindo que uma única máquina se adapte a diferentes tarefas enquanto extrai o máximo de movimento útil de seu espaço de trabalho.
Construindo um Robô a Partir de Peças Substituíveis
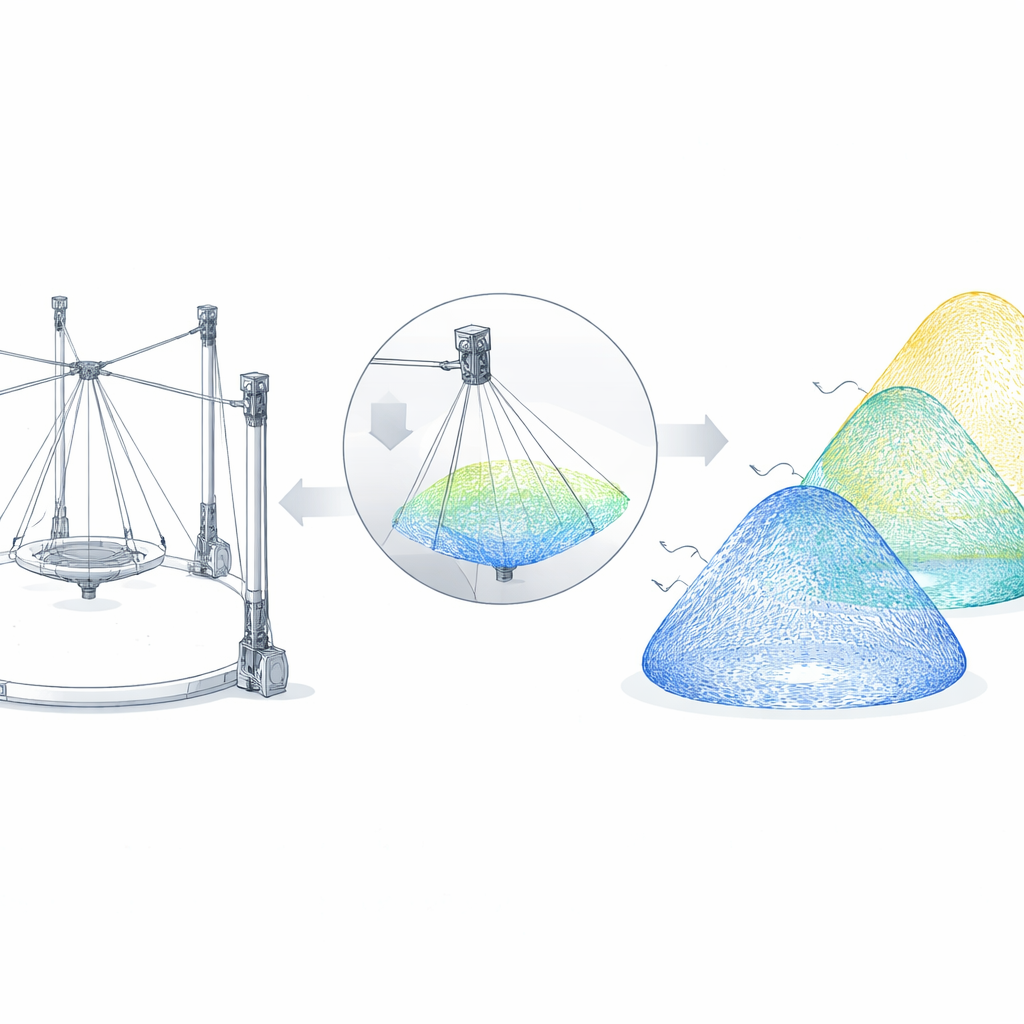
No cerne do estudo está um robô paralelo modular suspenso por cabos (MCSPR). Em vez de braços metálicos fixos, ele usa até seis “ramificações” idênticas, cada uma uma torre com motores, polias e um cabo que se conecta a uma plataforma móvel central, chamada efetuador final. Essas ramificações ficam ao redor de uma guia circular e podem ser adicionadas, removidas, giradas ou elevadas e rebaixadas. Ao reorganizá‑las, o mesmo hardware pode se comportar como vários robôs diferentes: com duas ramificações ele se move em um plano, com três ou quatro ele se move livremente no espaço, e com cinco ou seis ele também pode inclinar e rotacionar a plataforma em múltiplas direções.

Planejando o Esqueleto de uma Máquina que Muda de Forma
Projetar um sistema tão flexível não é apenas parafusando peças. Os autores usam uma abordagem sistemática de “síntese estrutural”, tratando cada cabo, polia e junta como um bloco de construção básico em uma rede. Com diagramas semelhantes a grafos, eles mapeiam como esses elementos se conectam para que a plataforma adquira as liberdades de movimento desejadas — como deslizar ao longo de três eixos ou girar em torno deles. Esse catálogo de módulos e conexões serve como um kit de projeto: dependendo do movimento que uma tarefa requer, o projetista pode escolher quantas ramificações usar e onde posicioná‑las na guia circular, confiante de que a estrutura resultante se comportará como pretendido.
Saber Para Onde a Plataforma Vai se Mover
Como a plataforma está suspensa por cabos que só podem puxar, não empurrar, prever seu movimento é mais complexo do que em robôs tradicionais. A equipe desenvolve uma descrição matemática unificada que funciona para todas as cinco configurações principais do MCSPR. Dada uma posição e orientação desejadas da plataforma, eles calculam exatamente o comprimento que cada cabo deve ter e a velocidade com que esse comprimento deve variar. Em seguida constroem um protótipo físico e comandam a plataforma para traçar um caminho espiral suave no espaço. Sensores ao longo dos cabos registram os movimentos reais, que correspondem de perto às previsões. Isso confirma que o modelo pode direcionar o robô de forma confiável mesmo quando sua geometria é reconfigurada.
Encontrando Onde o Robô Pode Ficar Parado com Segurança
Igualmente importante é entender onde a plataforma suspensa pode permanecer em equilíbrio. Se algum cabo ficar frouxo, o controle é perdido. Os autores concentram‑se no que chamam de espaço de trabalho de equilíbrio estático: a região do espaço onde todos os cabos podem permanecer sob tensão positiva enquanto apenas a gravidade atua sobre a plataforma. Usando uma abordagem de Monte Carlo, eles amostram aleatoriamente muitas posições e orientações possíveis da plataforma e verificam, para cada uma, se as tensões nos cabos necessárias para manter essa pose estão todas dentro de limites seguros. As amostras aceitas formam uma nuvem tridimensional que delineia o volume de trabalho disponível ao robô.
Estendendo o Alcance do Robô com Ajustes Inteligentes
Como as ramificações do MCSPR podem mudar de altura e ângulo, e a plataforma pode transportar cargas de diferentes massas e ângulos de inclinação, o tamanho e a forma desse volume seguro não são fixos. Os pesquisadores variam sistematicamente esses fatores em uma configuração de seis ramificações. Eles mostram que um payload mais pesado reduz drasticamente a região onde o robô pode ficar parado, enquanto escolhas inteligentes das alturas das ramificações e do espaçamento angular podem ampliá‑la. Em seguida, formulam um problema de otimização: ajustar a carga, as alturas das ramificações, os ângulos das ramificações e a faixa de inclinação da plataforma para maximizar o volume do espaço de trabalho seguro. Executando essa busca em software, encontram uma configuração em que o espaço alcançável e equilibrado é várias vezes maior do que em uma disposição ingênua.
Por que Isso Importa para Trabalhos do Mundo Real
Para um não especialista, a mensagem principal é que esse robô pode ser remodelado quase como um kit de construção, mas ainda assim ser analisado e ajustado com precisão. Ao combinar hardware modular com planejamento matemático cuidadoso e busca assistida por computador, os autores transformam uma única máquina suspensa por cabos em uma plataforma versátil que pode ser adaptada a muitas tarefas — da fabricação de precisão à reabilitação — ao mesmo tempo que aproveita ao máximo seu espaço operacional e mantém as cargas suportadas com segurança.
Citação: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Palavras-chave: robôs por cabo, robótica modular, mecanismos reconfiguráveis, espaço de trabalho do robô, manipuladores paralelos