Clear Sky Science · pt
Planejamento autônomo de trajeto para imagem ultrassonográfica intercostal robótica usando aprendizado por reforço
Robôs ajudando médicos a ver através das costelas
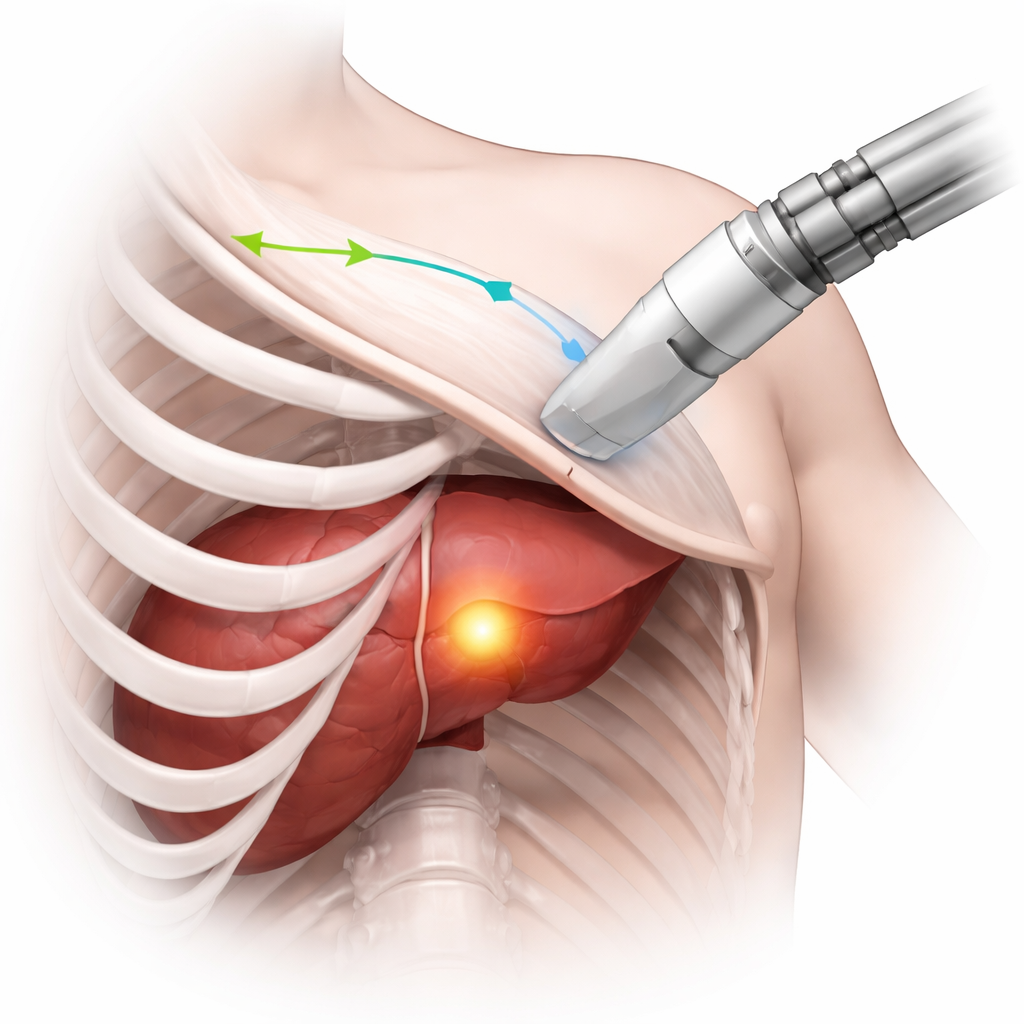
Quando médicos usam ultrassom para monitorar órgãos como o fígado ou o coração, as costelas frequentemente atrapalham, projetando sombras escuras que ocultam detalhes críticos. Obter uma visão nítida depende muito da habilidade e da experiência de quem segura o transdutor. Este estudo explora como um robô, guiado por inteligência artificial, pode planejar automaticamente um trajeto de varredura entre as costelas para que tumores e outros alvos sejam vistos de forma clara e consistente, independentemente de quem esteja operando a máquina.
Por que ver entre as costelas é tão difícil
O ultrassom é popular porque é seguro, acessível e fornece imagens em tempo real. Mas para imagear órgãos protegidos pela caixa torácica, o transdutor precisa ser manobrado cuidadosamente pelos estreitos espaços entre as costelas. Se as ondas sonoras atingirem os ossos, elas são bloqueadas, criando grandes regiões pretas na imagem onde nada pode ser visto. Operadores humanos aprendem, por meio de treinamento e experiência, como inclinar e mover o transdutor para evitar essas sombras enquanto mantêm a área de interesse em vista. Isso é especialmente importante em procedimentos como ablação de tumores hepáticos, em que cirurgiões devem verificar repetidamente se o tumor inteiro foi tratado. O desafio é transformar essa habilidade delicada e tridimensional em algo que um robô possa executar por conta própria.
Ensinando um robô com pacientes virtuais
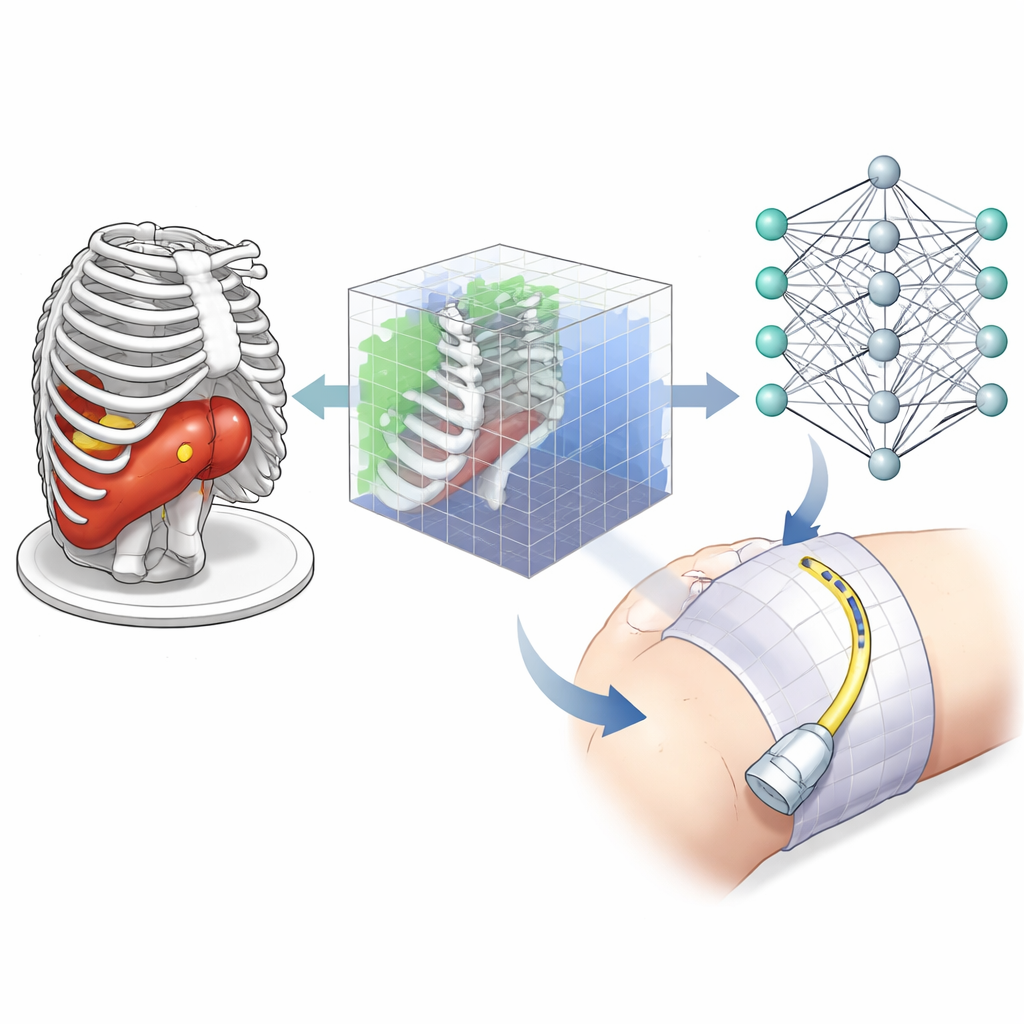
Em vez de aprender diretamente a partir de imagens de ultrassom ruidosas e variáveis, os pesquisadores construíram um campo de treinamento virtual usando tomografias computadorizadas (TC). A TC oferece um mapa tridimensional nítido de ossos, pele e fígado, e tumores podem ser adicionados com diferentes formas e posições para criar muitos cenários realistas. Neste simulador, um transdutor ultrassonográfico virtual move-se pela superfície da pele sobre as costelas, e os caminhos dos feixes de ultrassom são modelados como raios que atravessam tecido mole, mas são bloqueados pelo osso. Esse modelo simples, porém realista, informa ao sistema quais partes de um tumor são visíveis, quanto o sinal é atenuado durante a transmissão e onde aparecem sombras.
Como o sistema de aprendizado decide onde varrer
A equipe usou uma forma de inteligência artificial chamada aprendizado por reforço, na qual um “agente” aprende por tentativa e erro a escolher ações que levam a recompensas maiores. Em cada passo, o agente vê uma representação 3D compacta da cena ao redor do tumor: quais pequenos volumes contêm tumor, quais contêm osso e quais são atravessados pelos raios ultrassonográficos simulados. Em seguida, ele pode mover ou inclinar o transdutor virtual em pequenos incrementos, ou alternar entre um modo de “exploração” e um modo de “gravação” usado para construir a visão 3D final. A recompensa que recebe combina três objetivos: cobrir o máximo possível do volume alvo, manter o transdutor suficientemente próximo para reduzir perda de sinal, e evitar regiões onde os raios são bloqueados por osso, o que criaria imagens inúteis com sombras.
Colocando o método à prova
Para verificar se a estratégia aprendida generaliza além dos exemplos de treinamento, os pesquisadores a testaram em novas tomografias e em formas de tumor novas que o agente nunca havia encontrado. Nesses testes, um plano de varredura foi considerado bem‑sucedido se pelo menos 95% do volume alvo fosse imageado dentro de um número limitado de passos. Em alvos pequenos, médios e grandes, o sistema alcançou taxas de sucesso de até 95%, mantendo simultaneamente uma alta porcentagem de visões sem sombra e distâncias razoáveis entre o transdutor e o tumor. O método também funcionou quando havia múltiplos alvos a cobrir, como focos residuais de tumor espalhados no fígado, embora o desempenho naturalmente tenha caído um pouco à medida que a tarefa se tornava mais complexa.
Da simulação para a sala de operação
Por enquanto, o trabalho se concentra no planejamento do trajeto, em vez de mover fisicamente um robô real. Os trajetos são gerados a partir de tomografias específicas do paciente ou de “atlas” genéricos de TC que podem posteriormente ser ajustados à anatomia individual usando técnicas de registro existentes. No futuro, esse módulo de planejamento pretende ser combinado com controle robótico, compensação de movimento devido à respiração e simulação de imagem ultrassonográfica mais realista. Para um leigo, o ponto principal é que essa abordagem pode tornar o monitoramento por ultrassom durante procedimentos como o tratamento de tumores hepáticos mais confiável e menos dependente da perícia do operador, permitindo que um robô encontre rotas inteligentes e sem sombras entre as costelas para manter o alvo inteiro em visão.
Citação: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
Palavras-chave: ultrassom robótico, aprendizado por reforço, imagem de tumor hepático, varredura intercostal, robótica médica