Clear Sky Science · pt
Planejamento de caminho dinâmico ciente da qualidade para braços robóticos de 6 GDL usando BiRRT e otimização meta-heurística baseada em caminhos B-spline
Robôs que se movem de forma suave e segura
Robôs industriais hoje compartilham espaços de trabalho lotados com pessoas, ferramentas e sistemas de esteira. Nesses espaços apertados, um braço robótico não pode simplesmente ir do ponto A ao ponto B; ele deve fazê-lo sem colisões, com baixo consumo de energia e sem sacudir-se — ou danificar equipamentos próximos. Este artigo descreve uma maneira prática de planejar movimentos cuidadosos para um braço industrial comum de seis articulações, transformando trajetórias brutas encontradas por computador em movimentos suaves e conscientes de energia que podem ser executados com segurança em hardware de fábrica real.
Por que planejar um alcance simples é surpreendentemente difícil
Quando um braço robótico se move, muitas coisas precisam ser equilibradas ao mesmo tempo. O caminho deve ser curto para que as tarefas terminem rapidamente, o uso de energia deve ser moderado para limitar calor e desgaste, e o movimento deve ser suficientemente suave para que o braço não dê choques nem vibre. Abordagens clássicas traçam curvas matemáticas suaves (como splines) por alguns pontos de passagem escolhidos à mão, o que funciona bem em espaço aberto, mas pode se tornar ineficiente ou até inseguro em células congestionadas. Métodos de amostragem mais recentes, como Árvores de Exploração Rápida e Aleatória (RRT), são bons em atravessar campos de obstáculos complexos, mas tendem a produzir caminhos com curvas acentuadas que castigam motores e engrenagens. Os autores argumentam que nenhuma das famílias de métodos é suficiente por si só; em vez disso, eles as combinam em uma estrutura de duas etapas.
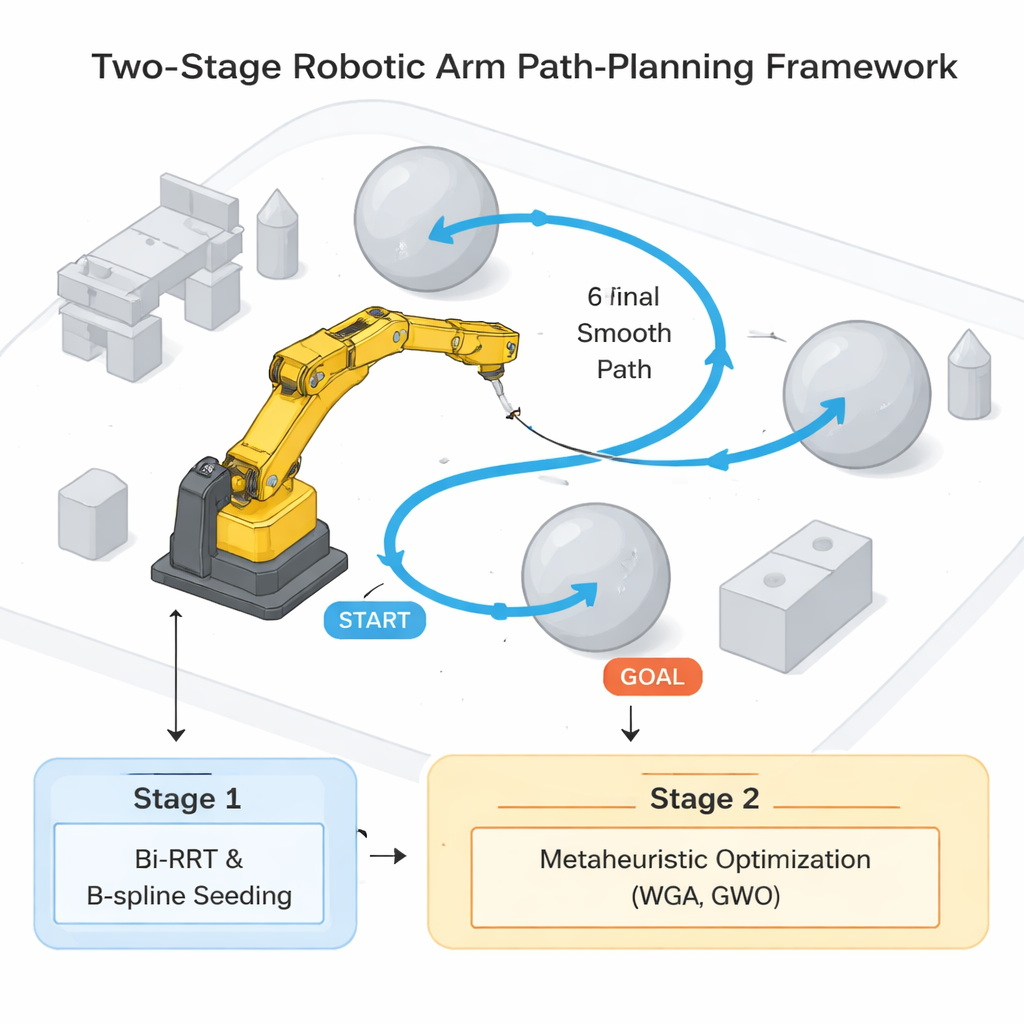
Um roteiro em duas etapas para o movimento do robô
Na primeira etapa, a equipe constrói uma “rota de referência” segura no espaço das juntas do robô em vez de apenas a posição da ferramenta no espaço cartesiano. Eles começam por uma curva B-spline suave que liga as posições inicial e final enquanto contorna obstáculos esféricos com uma margem de segurança. Essa curva então orienta um planejador Bi-RRT (RRT bidirecional) que faz crescer duas árvores aleatórias — a partir do início e a partir do objetivo — até que se encontrem em um caminho livre de colisões. Ao longo do processo, cada movimento tentativo de todo o braço é verificado contra formas de obstáculos simplificadas. Uma vez encontrado um caminho, dobras redundantes são aparadas por "short-cutting", e o resultado é reexpressado como uma spline parametrizada no tempo que o robô poderia, em princípio, seguir.
Ensinando o robô a se mover com mais suavidade
A segunda etapa pega esse caminho factível, mas imperfeito, e o ajusta com foco na qualidade. Aqui, os autores usam dois métodos de otimização inspirados na natureza: um algoritmo híbrido Baleia–Genético (WGA) e o Otimizador Lobo Cinzento (GWO). Ambos atuam sobre um conjunto limitado de pontos de controle e parâmetros de tempo ao longo da spline original, mas só podem mover esses pontos dentro de corredores seguros pré-calculados ao redor do caminho. Cada movimento candidato é avaliado por uma medida combinada que mistura três ingredientes: a distância percorrida pela ferramenta, a energia a nível de junta utilizada (com base nas características de cada motor) e o quanto as juntas apresentam "jerk" — quão rapidamente suas acelerações mudam ao longo do tempo. Ao propor, testar e melhorar repetidamente caminhos candidatos, esses otimizadores buscam movimentos que continuam livres de colisões, mas muito mais suaves e prontos para execução.
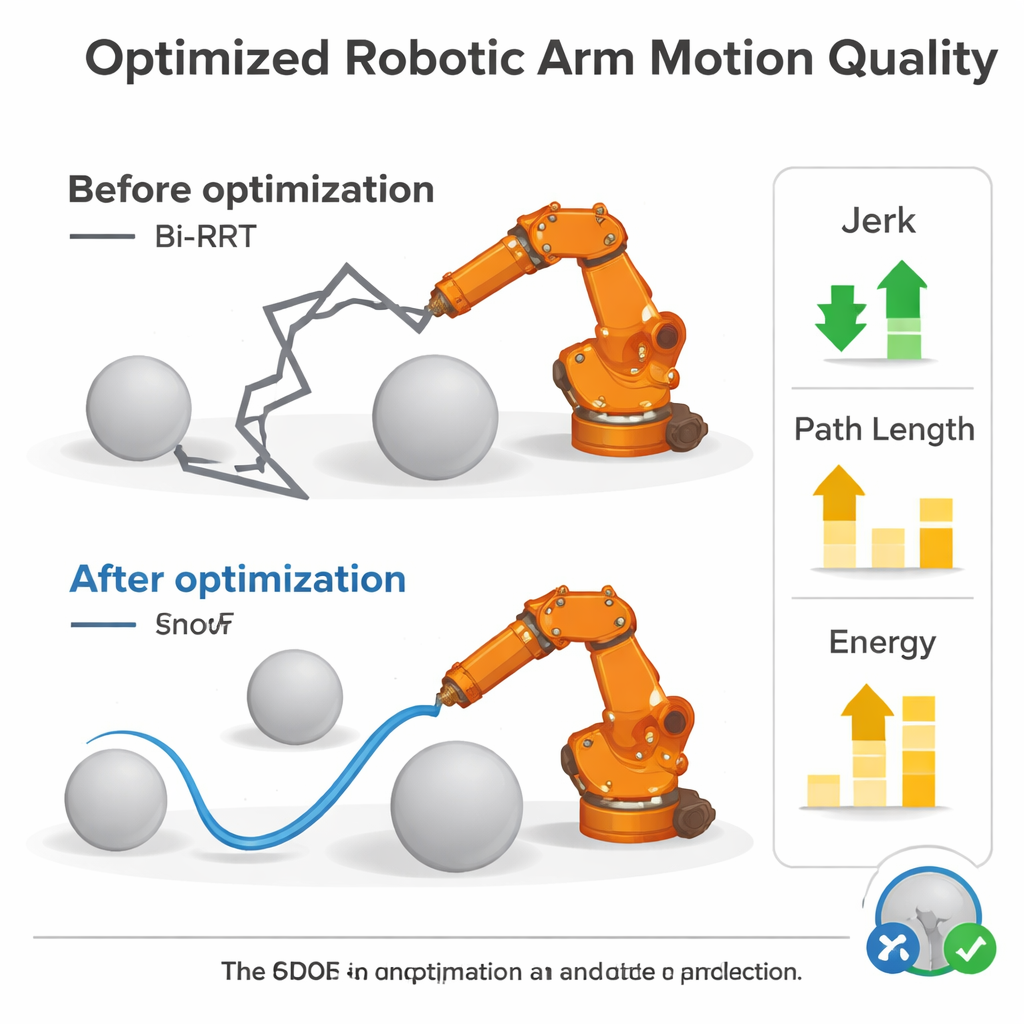
O que as simulações revelam
Os autores testam seu pipeline em um modelo digital de um braço industrial amplamente utilizado, o KUKA KR 4 R600, movimentando-se por uma cena com três obstáculos em um movimento fixo de dois segundos. Uma solução puramente baseada em spline já é razoavelmente suave, mas não explora sistematicamente todas as rotas seguras possíveis. Um Bi-RRT com short-cutting encontra um caminho de comprimento geométrico semelhante e até menor consumo de energia, mas com uma grande desvantagem: seu índice de jerk — um indicador de quão abruptamente as juntas mudam de aceleração — é cerca de dez vezes maior, sinalizando um movimento que provavelmente excitariam vibrações e estresse em uma máquina real. Após a aplicação do WGA ou do GWO, o jerk é reduzido em aproximadamente 94–96% em relação a esse caminho bruto do Bi-RRT. Essa suavização dramática tem o custo de apenas aumentos modestos na distância percorrida (cerca de 15–17%) e na energia (cerca de um fator de dois), um compromisso que os autores argumentam valer bem a pena para equipamentos reais.
Da teoria ao chão de fábrica
Para um não especialista, a conclusão chave é que os autores oferecem uma receita concreta — e ferramentas baseadas em MATLAB — para transformar a primeira ideia bruta de como um robô deve se mover em um movimento polido e compatível com hardware. A abordagem deles primeiro garante que exista um caminho através de um ambiente congestionado e, em seguida, remodela esse caminho para que o braço se mova com menos solavancos, respeitando ainda todos os limites e folgas das juntas. O resultado final é uma família de movimentos que um robô industrial real pode executar de forma mais segura e confiável, lançando as bases para extensões futuras em que robôs compartilhem espaços de trabalho com humanos e adaptem seus movimentos em tempo real usando câmeras e até interfaces de sinais cerebrais.
Citação: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Palavras-chave: planejamento de caminho de robô, braço robótico industrial, evitação de colisão, suavidade do movimento, otimização metaheurística