Clear Sky Science · pt
Modelos cognitivos facilitam a inferência em tempo real de motivos latentes
Por que adivinhar objetivos ocultos importa
Cada dia você lê silenciosamente as intenções das pessoas ao seu redor — se um motorista vai mudar de faixa, se um ciclista vai parar ou se um colega está tentando ajudar ou competir. Esses julgamentos de fração de segundo dependem de interpretar motivos ocultos a partir de movimentos visíveis. A inteligência artificial atual pode ser extremamente precisa em previsão, mas frequentemente funciona como uma “caixa-preta” incapaz de explicar por que tomou uma decisão. Este estudo investiga se modelos psicológicos do comportamento humano podem dar à IA uma capacidade mais humana de perceber os motivos alheios, tornando-a mais rápida, mais precisa e mais confiável.
Um jogo simples de perseguição e evasão
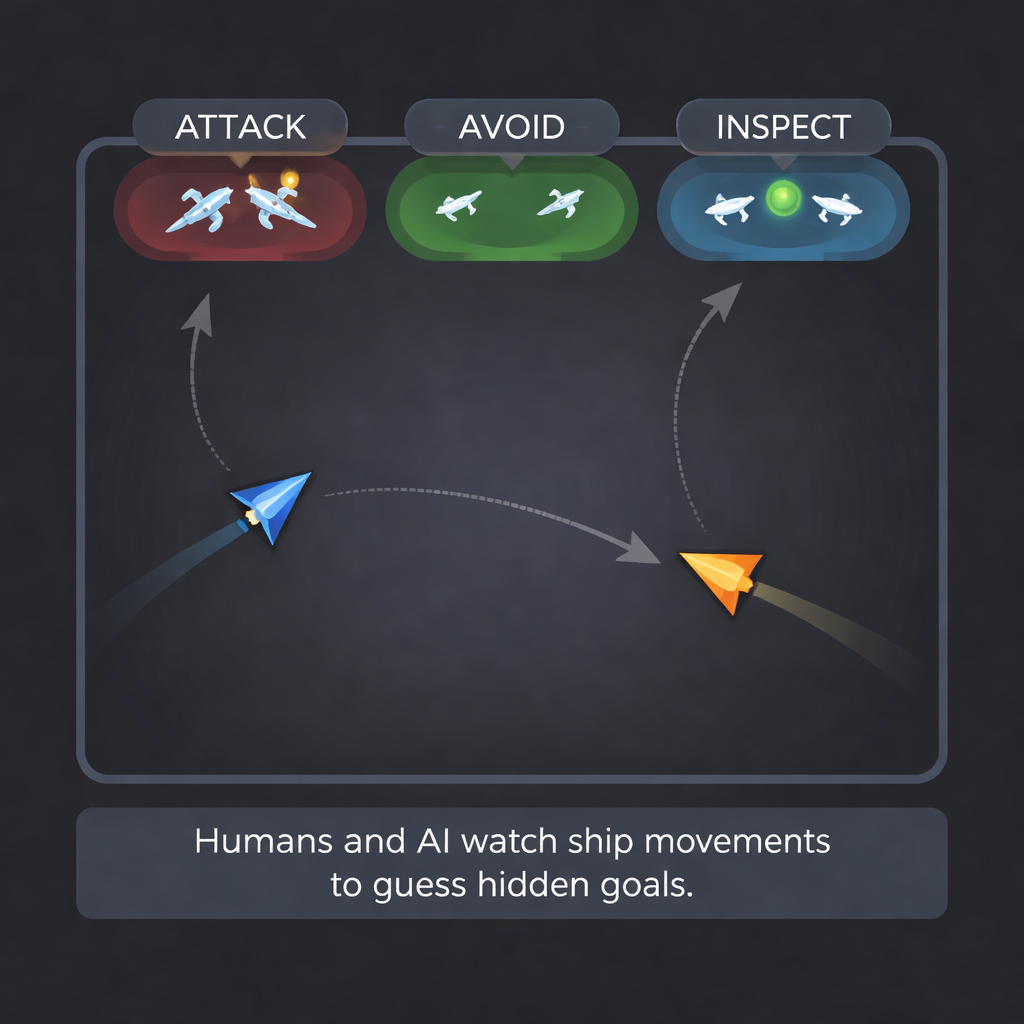
Para explorar isso, os pesquisadores criaram um videogame simplificado. Em cada rodada de 10 segundos, um jogador humano controlava uma “nave” triangular com um joystick enquanto uma nave controlada por computador se movia segundo um de vários padrões. Ao humano era atribuído secretamente um dos três objetivos: Atacar (colidir com a outra nave), Evadir (manter grande distância) ou Inspecionar (ficar próximo sem colidir). A nave do computador podia se comportar de forma agressiva, tímida, curiosa, defensiva ou apenas errante. Essas combinações criavam situações em que os movimentos das naves ou se alinhavam ou entravam em conflito — por exemplo, um humano atacante perseguindo um computador tímido que tentava fugir.
Medindo quão bem humanos leem objetivos ocultos
O primeiro passo foi descobrir quão bem as próprias pessoas conseguem ler motivos a partir do movimento. A equipe selecionou o gameplay dos oito pilotos de nave com melhor desempenho e transformou cada rodada em um vídeo curto. Novos voluntários assistiram a esses clipes e tiveram que adivinhar o objetivo do jogador humano — atacar, evadir ou inspecionar — após ver apenas 1, 4, 7 ou 10 segundos de movimento. Em vários grupos, incluindo participantes com e sem diagnóstico de autismo, as pessoas identificaram corretamente o objetivo em cerca de dois terços das vezes. A precisão aumentou conforme viam mais da rodada, e o desempenho foi semelhante entre os grupos, fornecendo um referencial humano sólido para comparação.
Um roteiro psicológico para o movimento
Em vez de alimentar dados brutos tipo vídeo diretamente em uma rede neural, os autores construíram um modelo cognitivo para capturar as forças que podem impulsionar o movimento de uma pessoa. Seu modelo de “perseguição de objetivos global-local” (GLOP) assume que um jogador equilibra várias forças ao mesmo tempo: manter uma distância preferida do oponente (muito perto é perigoso, muito longe perde oportunidades), ficar em boas posições na tela em vez de ficar preso em um canto, e ajustar ou antecipar o ritmo e a direção da outra nave. Esses fatores são combinados em uma única direção “motivacional” de movimento, com termos extras para refletir quão suavemente as pessoas se movem e quanto de aleatoriedade há em seu controle.

Treinando IA para ler mentes a partir do movimento
Para tornar esse modelo útil em tempo real, os pesquisadores simularam 100.000 rodadas do jogo usando muitas configurações diferentes dos parâmetros do GLOP. Em seguida, treinaram uma rede neural recorrente para receber sequências de posições das naves e estimar rapidamente os parâmetros latentes — como distância preferida ou o quanto alguém valoriza a posição global. Essa rede conseguiu recuperar vários parâmetros-chave com muita precisão a partir de apenas alguns segundos de movimento. Depois, treinaram um conjunto de redes classificadoras para adivinhar o objetivo do jogador de três maneiras diferentes: diretamente a partir dos dados brutos de posição, a partir de estatísticas sumarizadas simples (como distância média e aproximação versus evasão), ou a partir dos parâmetros inferidos pelo modelo cognitivo. Finalmente, construíram classificadores “ensemble” que combinavam essas fontes.
Superando o referencial humano
Todos os classificadores de IA igualaram ou superaram o desempenho humano, mas a forma como a informação foi preparada para eles importou. Redes que se basearam apenas em movimento bruto ou apenas nos parâmetros do modelo performaram de forma similar às pessoas, com cerca de 66% de acurácia. Classificadores alimentados com estatísticas simples tiveram desempenho melhor, e os melhores resultados vieram de combinar essas estatísticas com os parâmetros do modelo cognitivo, alcançando cerca de 72% de acurácia. Esses sistemas informados pelo modelo também treinaram mais rápido e com maior estabilidade do que os alimentados apenas com dados brutos. Quando a acurácia foi acompanhada momento a momento durante cada rodada, a IA pôde atualizar seu palpite sobre o objetivo oculto de um jogador em menos do que o intervalo entre atualizações da tela, inferindo a intenção efetivamente em tempo real.
O que isso significa para a IA do dia a dia
Para o público em geral, a conclusão é que entrelaçar teoria psicológica na IA pode ajudar máquinas a entender não só o que as pessoas fazem, mas por que o fazem. Ao traduzir movimentos desordenados em um pequeno conjunto de motivos interpretáveis — como quão próximo alguém quer estar ou como equilibram segurança e oportunidade — o sistema se torna tanto mais preciso quanto mais fácil de explicar. Em aplicações futuras, como carros autônomos ou equipes humano–IA, esse tipo de “front end cognitivo” poderia ajudar a IA a antecipar intenções de outros agentes mais cedo e de forma mais confiável, potencialmente prevenindo colisões e mal-entendidos, ao mesmo tempo em que oferece explicações amigáveis para humanos, como “o outro motorista provavelmente está tentando mudar de faixa, não apenas se desviando.”
Citação: Fitch, A.K., Kvam, P.D. Cognitive models facilitate real-time inference of latent motives. Sci Rep 16, 6444 (2026). https://doi.org/10.1038/s41598-026-37587-8
Palavras-chave: teoria da mente, modelagem cognitiva, inferência de intenções, interação humano–IA, IA explicável