Clear Sky Science · pt
Adaptações da marcha durante a locomoção com andador em idosos: uma análise de componentes principais de parâmetros espaço‑temporais e cinemáticos
Por que caminhar com um andador inteligente é importante
À medida que as pessoas envelhecem, caminhar costuma ficar mais lento e menos estável, aumentando o risco de quedas, fraturas e perda de independência. Muitos idosos usam andadores para manter a mobilidade, mas esses dispositivos também podem alterar sutilmente a forma como se movem — às vezes de maneiras pouco compreendidas. Neste estudo, investigamos como um “andador inteligente” de alta tecnologia altera o padrão de marcha de idosos saudáveis, usando medições detalhadas de movimento e estatística avançada para separar quais mudanças decorrem do envelhecimento e quais são causadas pelo próprio dispositivo.
Como envelhecimento e apoios para caminhar estão conectados
As quedas são um grande problema de saúde na velhice, com cerca de uma em cada três pessoas acima de 65 anos sofrendo ao menos uma queda por ano. Para reduzir esse risco, clínicos frequentemente prescrevem andadores. No entanto, andadores convencionais podem ser difíceis de manobrar e até aumentar a instabilidade se usados incorretamente. Engenheiros começaram a desenvolver andadores inteligentes que incluem sensores, atuadores e sistemas de controle para fornecer suporte e orientação mais suaves. Antes de implantar amplamente esses dispositivos em pessoas com condições como AVC ou Parkinson, é preciso entender como eles alteram a marcha em idosos saudáveis. Esse panorama “limpo” vira a linha de base para identificar se, no futuro, pacientes estão melhorando, compensando ou adotando novos hábitos de movimento potencialmente prejudiciais.
Um olhar mais atento sobre caminhar com assistênc ia do andador inteligente
A equipe estudou 14 voluntários idosos de meados dos 60 anos que não apresentavam déficits de marcha. Cada pessoa completou duas caminhadas simples de 10 metros: uma sem dispositivo e outra usando um andador inteligente chamado UFES vWalker. Esse andador robótico possui sensores de força, scanners a laser e rodas controladas por software que converte a força de empurrão do usuário em uma velocidade máxima segura e baixa de 0,4 metros por segundo. Enquanto os participantes caminhavam, um traje de captura de movimento vestível com pequenos sensores no quadril, coxas, canelas e pés registrou a velocidade de caminhada, a duração de cada passo, a largura dos passos e como as articulações do quadril, joelho e tornozelo se moviam ao longo do ciclo de marcha.
O que mudou quando o andador foi usado
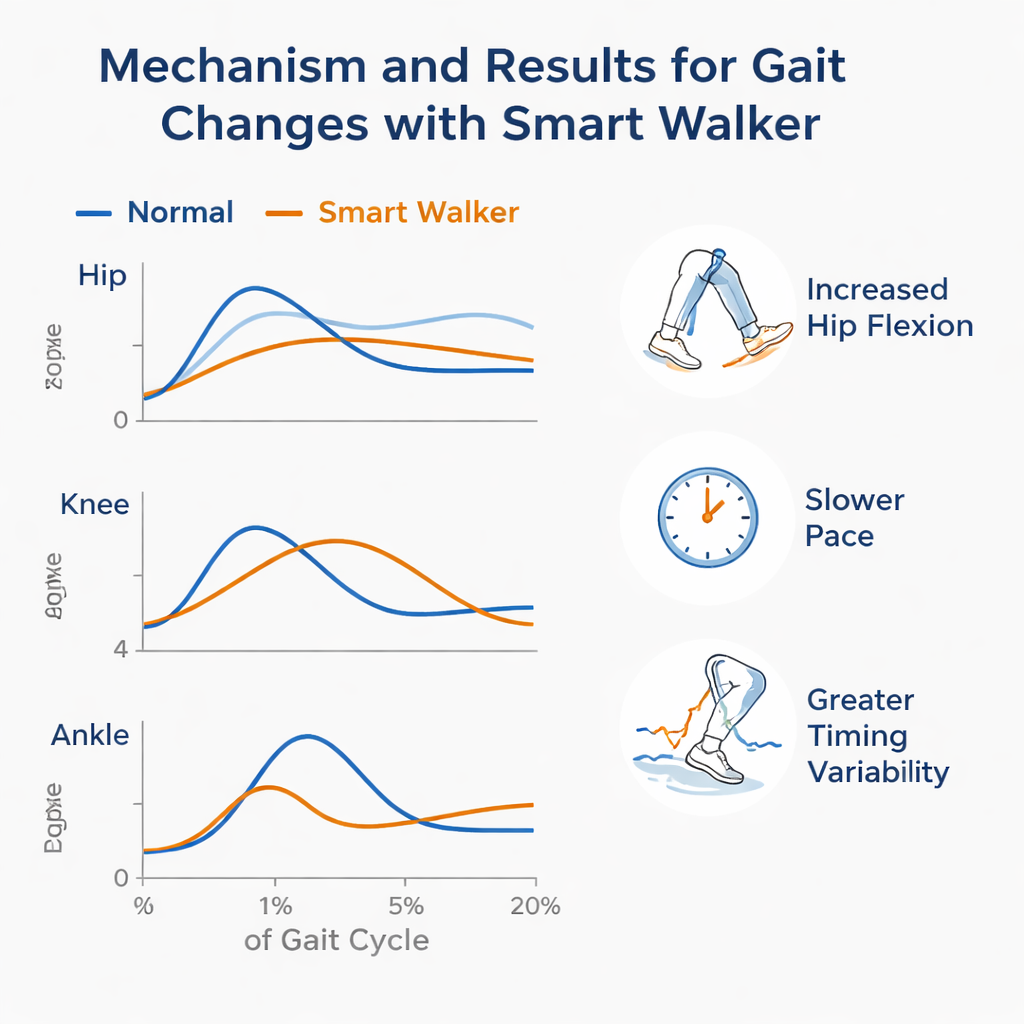
Ao usar o andador inteligente, os participantes se moveram mais devagar, deram passos mais curtos e ligeiramente mais estreitos, e passaram mais tempo com os dois pés no chão. O tempo entre um passo e outro também ficou mais variável. Os ângulos articulares mudaram: os quadris permaneceram em uma postura mais flexionada, “inclinação para frente”, ao longo da caminhada, enquanto os joelhos tenderam a flexionar menos durante a fase de balanço. Muitos movimentos de tornozelo e quadril aumentaram, refletindo a postura curvada adotada para apoiar os antebraços nas alças do andador. Essas alterações não foram aleatórias. Usando uma técnica estatística chamada análise de componentes principais, os pesquisadores agruparam medidas relacionadas em “domínios” mais amplos, como ritmo, cadência, simetria, base de apoio e movimento articular. A marcha normal apresentou domínios claros semelhantes aos encontrados em estudos prévios sobre envelhecimento, mas a marcha assistida pelo andador gerou um padrão diferente, incluindo novos domínios ligados especificamente ao balanço da perna e à geração do passo quando o peso do corpo é parcialmente suportado pelo dispositivo.
Padrões ocultos em como caminhamos
Ao combinar medidas padrão passo a passo com dados de movimento articular, a análise mostrou como diferentes partes da marcha são coordenadas. Na marcha normal, velocidade e variabilidade formaram um domínio chave, enquanto ritmo, simetria e base de apoio formaram outros; a inclusão dos ângulos articulares separou padrões de movimento distintos para quadril, joelho e tornozelo. Com o andador inteligente, porém, o movimento de joelho e tornozelo durante o apoio inicial ficou fortemente ligado à velocidade de caminhada, enquanto o movimento de quadril e joelho durante o balanço da perna relacionou‑se às diferenças entre os passos esquerdo e direito. Outro domínio novo, chamado dinâmica do passo, capturou como comprimento do passo, diferenças de tempo e impulsão do tornozelo interagiam quando o andador estava envolvido. Esses domínios específicos do dispositivo sugerem que o andador inteligente faz mais do que simplesmente estabilizar o usuário — ele remodela ativamente como as pernas se coordenam para produzir cada passo.
O que isso significa para caminhar com mais segurança na velhice
Para o público não especializado, a mensagem principal é que andadores inteligentes podem tornar a marcha mais lenta e controlada, mas também incentivam uma postura inclinada para frente e um padrão diferente de temporização dos passos e de movimento das pernas em comparação com a marcha normal. Essas mudanças induzidas pelo dispositivo não são necessariamente ruins; no curto prazo podem ajudar as pessoas a se sentirem mais seguras. Mas se programas de reabilitação dependerem do andador inteligente por tempo excessivo sem ajustes cuidadosos, os usuários podem “aprender” um estilo de marcha difícil de desaprender depois. Os autores defendem que terapeutas e projetistas usem esses achados para ajustar o nível de suporte, a altura das alças e os objetivos do treinamento, de modo que os andadores inteligentes atuem como degraus rumo a uma marcha mais segura e natural — e não como muletas permanentes que consolidam hábitos novos e menos eficientes.
Citação: Elias, A., Loureiro, M., Machado, F. et al. Gait adaptations to walker-assisted locomotion in elderly: a principal component analysis of spatiotemporal and kinematic parameters. Sci Rep 16, 6872 (2026). https://doi.org/10.1038/s41598-026-37448-4
Palavras-chave: andador inteligente, marcha em idosos, prevenção de quedas, robótica em reabilitação, sensores de movimento vestíveis