Clear Sky Science · pt
Escalonamento seguro de formação e planejamento de movimento para equipes heterogêneas UAV–UGV em ambientes congestionados
Robôs que trabalham juntos no ar e no solo
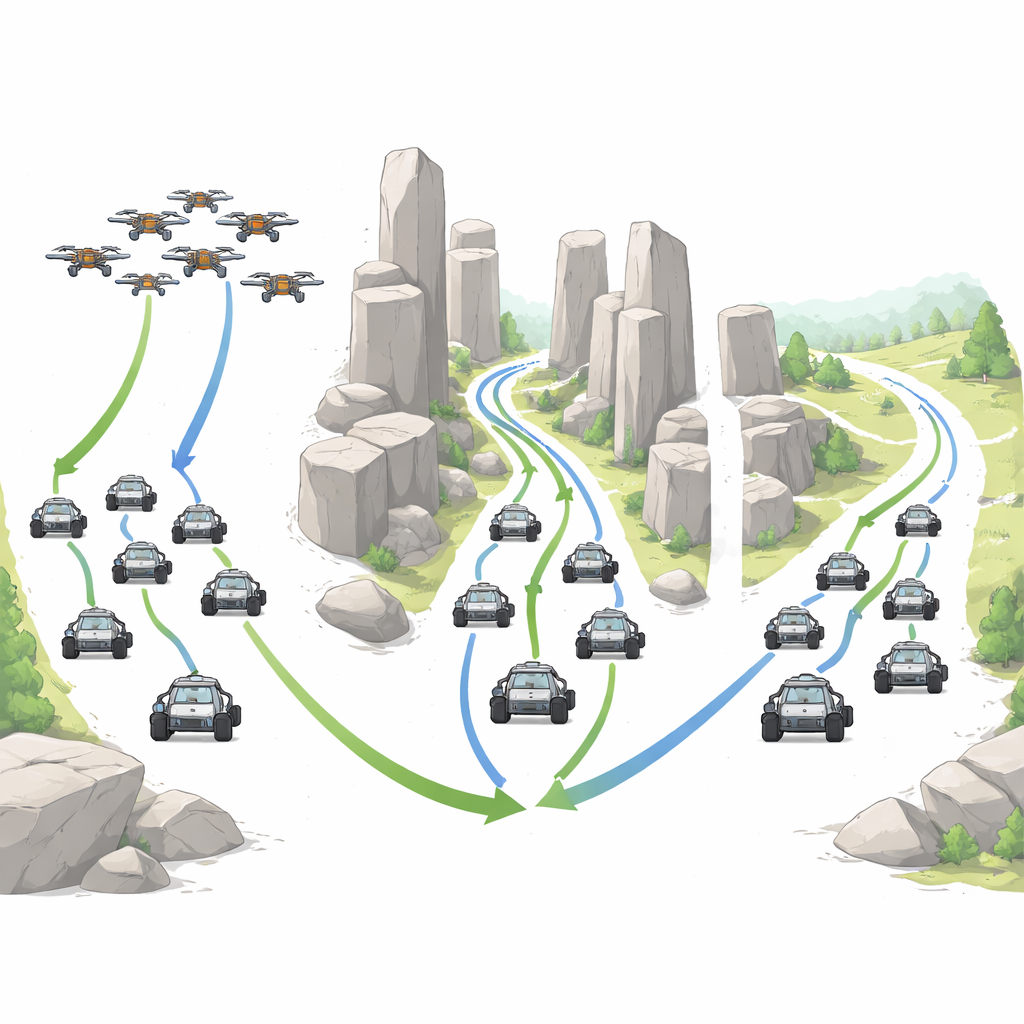
Imagine um enxame de pequenos drones voadores fazendo reconhecimento sobre uma zona de desastre enquanto veículos terrestres resistentes serpenteiam pelo entulho abaixo, todos se movendo como uma equipe coordenada. Este artigo explora como manter tais grupos mistos de robôs unidos em espaços apertados e cheios de obstáculos, sem colisões ou replanejamentos frenéticos. Os autores propõem uma nova maneira para robôs aéreos e terrestres compartilharem uma formação estável, atravessarem brechas estreitas e ainda assim chegarem ao destino de forma rápida e segura.
Por que equipes mistas de robôs são difíceis de coordenar
Drones e veículos terrestres com rodas se comportam de maneiras muito diferentes. Drones cortam o espaço tridimensional e são facilmente desviados pelo vento. Veículos terrestres devem obedecer a limites de curva e lidar com terrenos acidentados. Ainda assim, muitas missões reais — desde busca e salvamento até inspeção de infraestrutura — se beneficiariam se esses robôs pudessem viajar juntos como um grupo tridimensional único. Métodos existentes frequentemente tratam a manutenção de formação e a evitação de obstáculos como problemas separados. Quando o ambiente fica congestionado, as formações tendem a se desfazer e depois se reagrupar, desperdiçando tempo e aumentando a chance de colisões.
Uma nova forma de manter o grupo unido
Para enfrentar isso, os autores projetam uma estrutura que chamam de RG–ASAPF, que acopla de forma estreita como o grupo é moldado e como ele se movimenta. No cerne está uma descrição matemática da formação como uma estrutura "rígida": as distâncias desejadas entre robôs são escolhidas de modo que a forma geral seja unicamente determinada, como as barras de um andaime 3D estável. Cada robô então usa uma regra compartilhada para ajustar seu movimento de modo que essas distâncias sejam restabelecidas e mantidas, mesmo enquanto a formação se move e faz curvas. Essa regra foi elaborada para funcionar tanto com robôs voadores quanto com terrestres, e se adapta online a incertezas como atrito não modelado ou pequenos empurrões externos.
Deixando a formação "respirar" em espaços estreitos
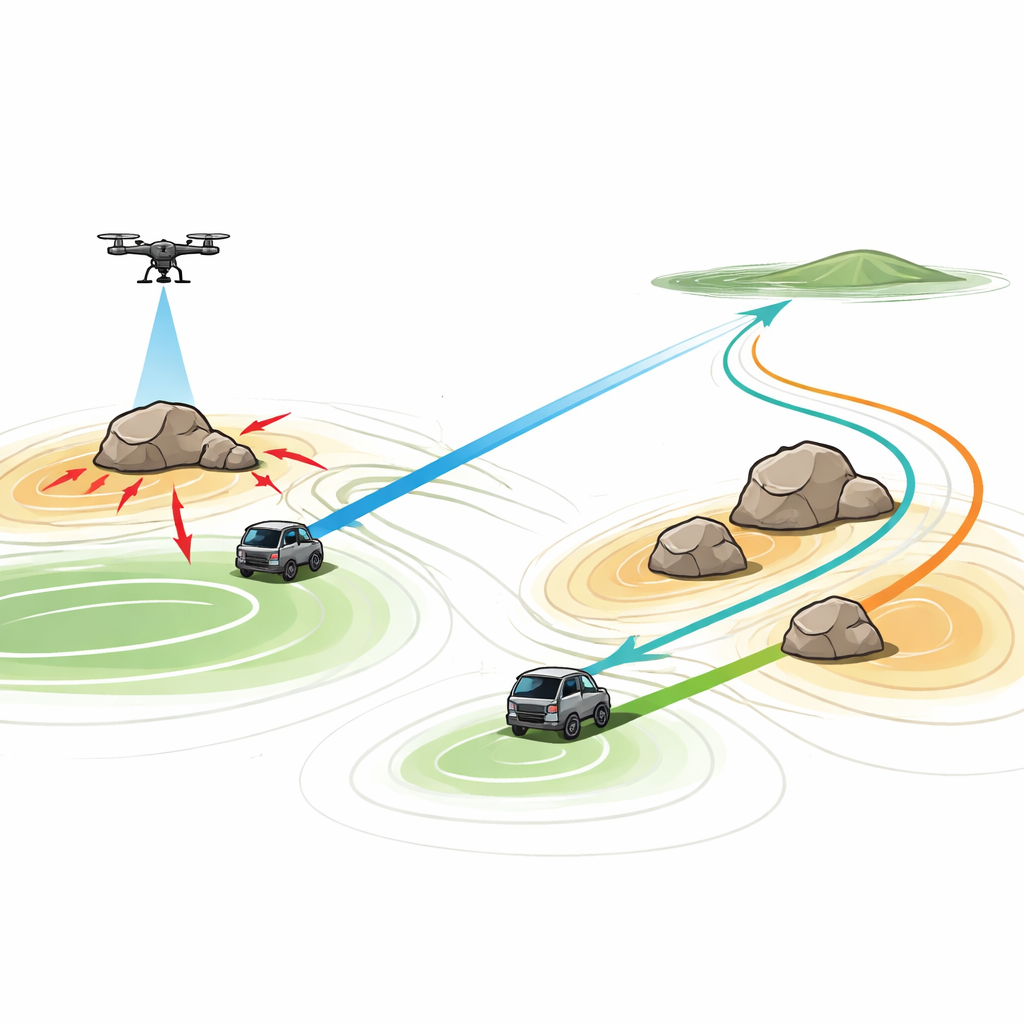
Ambientes reais raramente são campos abertos; eles estão cheios de prédios, árvores, veículos e objetos em movimento. Uma formação segura em espaço aberto pode ser grande demais para passar por um beco estreito ou um aglomerado denso de obstáculos. O método proposto permite que a formação escale suavemente — encolhendo ou expandindo seu tamanho geral — preservando sua estrutura básica. A equipe introduz um veículo líder terrestre que planeja um caminho usando um campo potencial artificial, onde o objetivo age como um atrator e os obstáculos empurram a formação para longe. Ao contrário dos campos potenciais tradicionais, que podem ficar presos em becos sem saída ou causar movimentos oscilatórios, sua versão "adaptativa e segura" ajusta continuamente a intensidade com que os obstáculos repelem os robôs, de modo que eles mantenham uma distância segura sem se tornarem excessivamente cautelosos ou presos.
Caminhos mais inteligentes através do caos e do movimento
O campo potencial é refinado adicionalmente para que a "paisagem" global de atração e repulsão tenha sempre seu ponto mais baixo no objetivo. Isso ajuda a evitar que a formação fique encalhada em pontos estranhos entre obstáculos. A intensidade do efeito repulsivo é ajustada em tempo real usando uma regra de aprendizado simples emprestada do treinamento inicial de redes neurais. Quando os robôs se aproximam demais de obstáculos, a repulsão cresce automaticamente; quando há folga suficiente, ela relaxa. Se o ambiente ficar tão apertado que mesmo uma formação reduzida não consiga passar com segurança, o método ativa um plano de contingência: a equipe faz uma breve pausa, infla um corredor de segurança conceitual e replaneja uma rota mais segura ao redor da área problemática antes de continuar.
Testes em mundos virtuais
Para avaliar o desempenho do método, os autores realizam extensas simulações por computador com equipes mistas de drones e veículos terrestres. Eles testam áreas abertas com poucos obstáculos, labirintos densos com muitas barreiras, cenas com obstáculos em movimento e formações que precisam se transformar em formas 3D mais complexas, como um prisma hexagonal. Em todos esses casos, a formação se mantém unida em três dimensões, evita com segurança obstáculos estáticos e móveis e ajusta seu tamanho quando necessário. Os robôs seguem trajetórias suaves e eficientes em vez de ziguezaguear ao redor das barreiras. Em comparação com vários métodos populares de planejamento — incluindo campos potenciais clássicos e melhorados, otimização por enxame de partículas e controle preditivo baseado em modelos linear e não linear — a nova abordagem encontra caminhos que costumam ser mais curtos, mais suaves e menos consumidores de energia, além de calculá-los mais rápido do que técnicas pesadas baseadas em otimização.
O que isso significa para missões no mundo real
Para um público não especialista, a mensagem principal é que o artigo mostra como fazer equipes mistas de robôs voadores e terrestres se moverem como um único corpo flexível através de espaços 3D congestionados. Em vez de romper a formação sempre que surgem obstáculos, o grupo pode dobrar-se, encolher e reorientar-se mantendo coerência e segurança. Isso pode se traduzir em suporte robótico mais rápido e confiável durante desastres, inspeções industriais e patrulhas de segurança. Embora o trabalho atual tenha sido demonstrado em simulações e dependa de um veículo líder designado, os autores descrevem passos futuros rumo a equipes mais tolerantes a falhas e a experimentos no mundo real, aproximando a visão de enxames robóticos ar–solo fortemente coordenados da prática.
Citação: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Palavras-chave: formação multi-robô, cooperação UAV UGV, evitação de obstáculos, planejamento de movimento, robótica de enxame