Clear Sky Science · pt
Exoesqueleto de teleoperação para membro superior com parametrização contínua do comprimento do braço e mistura adaptativa de impedância acionada por força
Mãos mais seguras trabalhando à distância
Muitas das tarefas mais perigosas na Terra — e no espaço — ainda exigem julgamento e destreza humanos. Pense em reparar uma instalação nuclear danificada, manusear explosivos ou estabilizar uma espaçonave. Este estudo apresenta um novo tipo de exoesqueleto motorizado para o braço que permite a uma pessoa controlar um braço robótico distante como se fosse seu próprio braço, permanecendo longe do perigo. O dispositivo foca em fazer o robô mover-se e “sentir” como uma extensão natural do corpo do usuário, mesmo enquanto se ajusta a diferentes tamanhos de braço e a forças variáveis no ambiente.
Por que braços remotos importam
Robôs já operam debaixo d’água, em zonas de desastre e dentro de reatores, mas a maioria é pré-programada ou guiada por joysticks simples. Isso limita o que podem fazer quando as condições mudam subitamente. Sistemas de teleoperação — nos quais uma pessoa controla um robô remoto em tempo real — oferecem um caminho intermediário, combinando a capacidade de decisão humana com a força e o alcance robóticos. Sistemas antigos conseguiam mover ferramentas, mas frequentemente careciam de feedback preciso sobre forças e não se ajustavam facilmente aos corpos de diferentes usuários. O resultado era movimento desajeitado, sensação ruim e esforço extra para o operador e para a máquina.
Um robô vestível que realmente se ajusta
A equipe construiu um exoesqueleto vestível para membro superior com sete juntas motorizadas alinhadas ao ombro, cotovelo e punho. Materiais leves como fibra de carbono e alumínio mantêm o dispositivo responsivo, em vez de pesado e lento. Uma inovação importante é que o comprimento do braço superior e do antebraço do exoesqueleto pode ser ajustado de forma contínua, não em alguns passos fixos. Trilhos deslizantes com sensores elétricos integrados medem continuamente o comprimento real do braço do usuário e alimentam essa informação em um modelo corporal digital. Como resultado, o dispositivo remodela automaticamente sua geometria interna para cada pessoa, melhorando o conforto e tornando os movimentos do robô mais fiéis às intenções humanas. 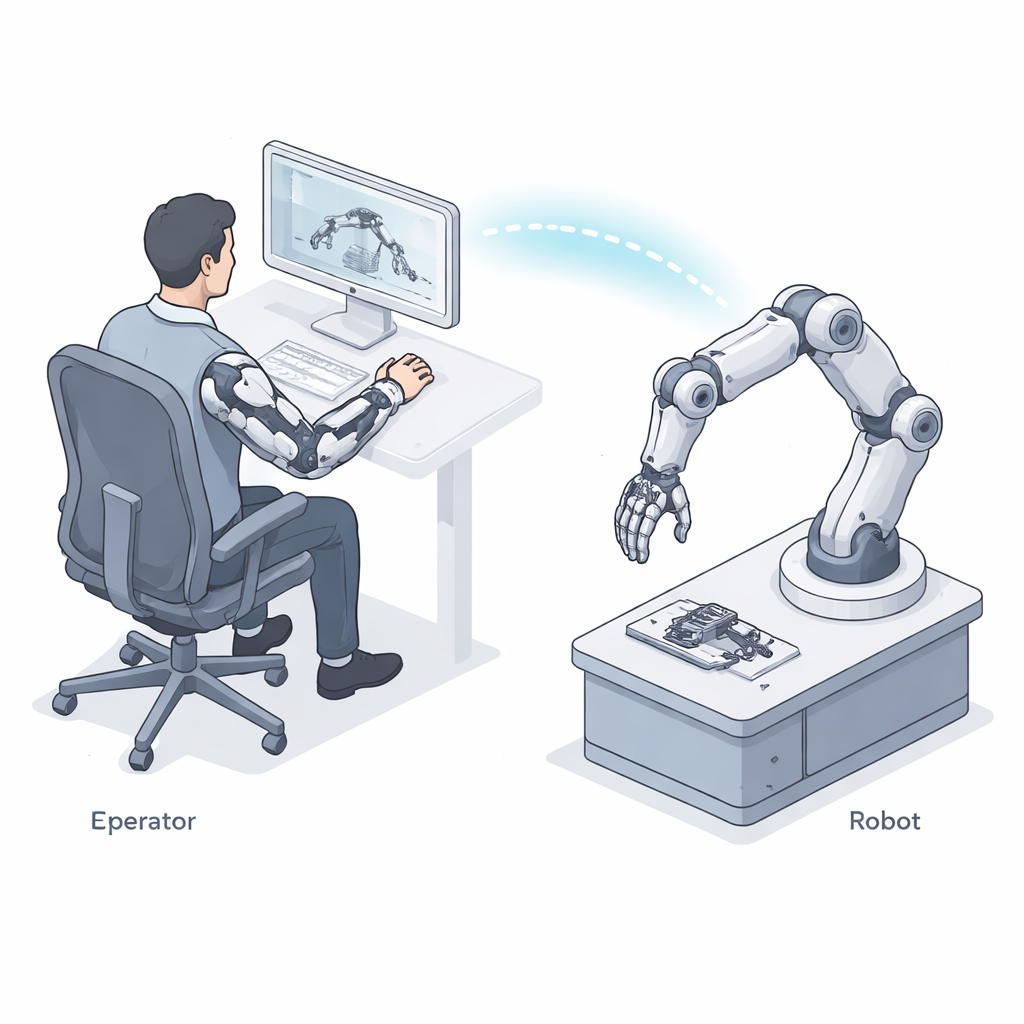
Movendo-se com o corpo, não contra ele
Os ombros humanos não giram apenas como dobradiças; a escápula também desliza sobre a caixa torácica. Muitos exoesqueletos ignoram isso e acabam resistindo ao movimento natural, causando desconforto. Este projeto adiciona um módulo passivo com vários graus de liberdade extras que segue discretamente as sutis mudanças do ombro e da parte superior do corpo, aliviando a pressão sobre a pele e as articulações. Ao mesmo tempo, as juntas motorizadas são calibradas para que seu torque — força de torção — permaneça abaixo dos limites seguros para o tecido humano. Paradas de emergência e detectores de bloqueio completam os recursos de segurança, permitindo que o sistema reaja rapidamente se algo der errado.
Uma forma mais inteligente de perceber contato
Além da mecânica, os autores concentram-se no que o usuário sente. Quando o robô remoto toca ou empurra algo — uma parede, o cabo de uma ferramenta ou outro objeto — essas forças são traduzidas de volta pelo exoesqueleto para que o usuário perceba resistência. O sistema de controle mistura duas necessidades normalmente conflitantes: rastreamento preciso dos movimentos do operador e comportamento suave e compliance quando as forças de contato aumentam. Em baixas forças, o sistema age rígido e preciso, seguindo de perto o trajeto do braço do usuário. À medida que as forças ultrapassam um limiar de segurança, o controle amolece automaticamente, permitindo certa folga para que os impactos sejam amortecidos em vez de bruscos. Os autores usam ferramentas matemáticas baseadas em energia para mostrar que esse comportamento misto permanece estável em vez de degenerar em oscilações. 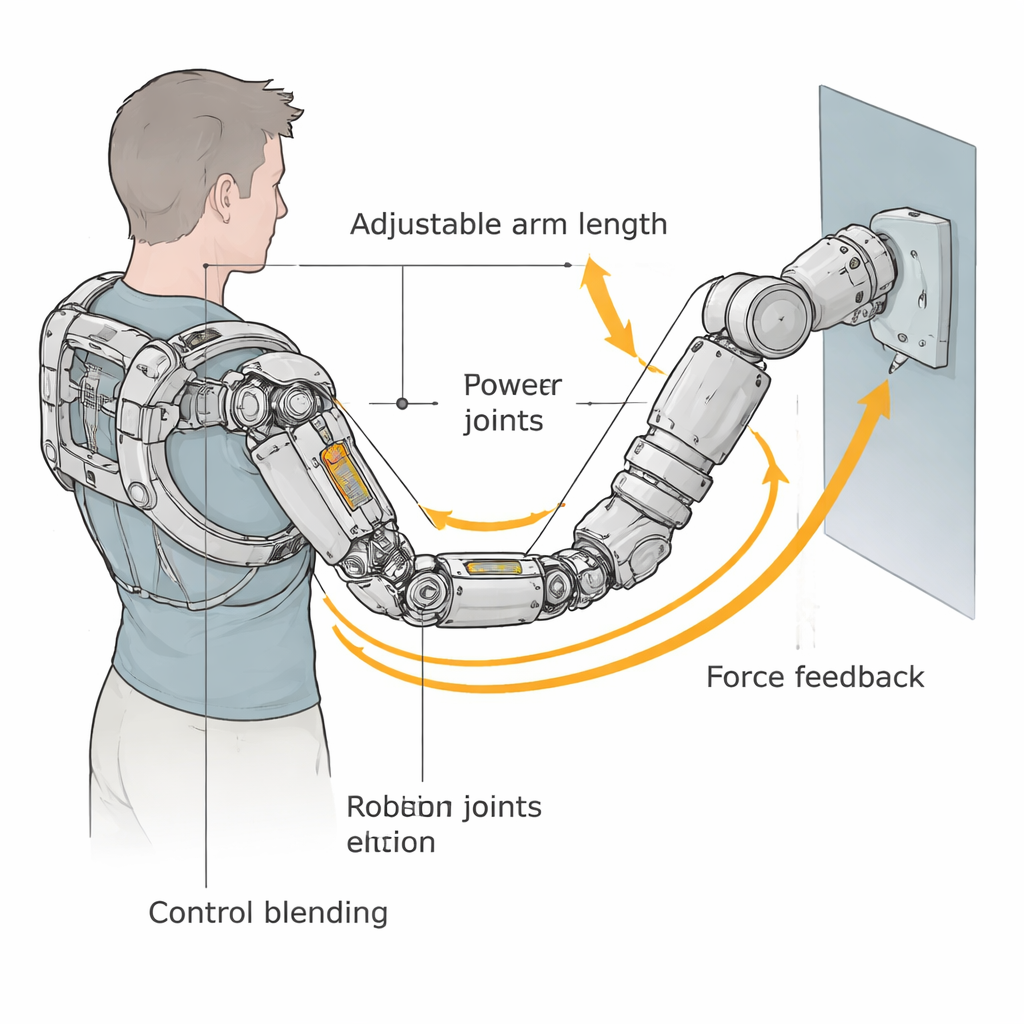
Colocando o sistema à prova
Para avaliar o exoesqueleto, os pesquisadores o conectaram a um braço robótico industrial amplamente usado. Quando uma pessoa vestindo o exoesqueleto traçou um caminho em forma de oito no ar, o robô remoto reproduziu o movimento de forma fiel, apesar de pequenos atrasos de comunicação. Testes adicionais examinaram o desempenho da medição do comprimento do braço: leituras de voltagem dos sensores deslizantes corresponderam às medidas físicas com erros de menos de alguns milímetros, mesmo após repetidas colocações e retiradas. Em simulações controladas nas quais o robô pressionava contra uma parede rígida virtual, o esquema de controle completo reduziu as forças de contato de pico em quase 70% em comparação com uma configuração básica, preservando em grande parte a precisão do rastreamento em movimento livre.
O que isso significa para trabalho e cuidado no mundo real
Em termos práticos, esta pesquisa nos aproxima de robôs remotos que são tão naturais e seguros de controlar quanto mover o próprio braço. Ao combinar uma estrutura ajustável que se ajusta ao corpo, rastreamento cuidadoso do movimento humano e um feedback de força inteligente que se adapta em tempo real, o sistema promete teleoperação mais precisa e menos cansativa em ambientes perigosos. A mesma tecnologia também pode atender pacientes em recuperação de AVC, permitindo que terapeutas guiem e registrem movimentos de braço enquanto os pacientes recebem assistência e feedback realistas. À medida que versões futuras integrarem sinais musculares e de olhar e aprenderem com a experiência, pares exoesqueleto–robô podem se tornar ferramentas versáteis tanto para missões extremas quanto para reabilitação cotidiana.
Citação: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Palavras-chave: exoesqueleto de teleoperação, controle de braço robótico, retroalimentação de força, robótica para reabilitação, operações remotas em ambientes perigosos