Clear Sky Science · pt
Protocolo de resposta a emergências de ponta a ponta para acidentes em túneis aumentado com aprendizado por reforço
Por que resgates mais inteligentes em túneis são importantes
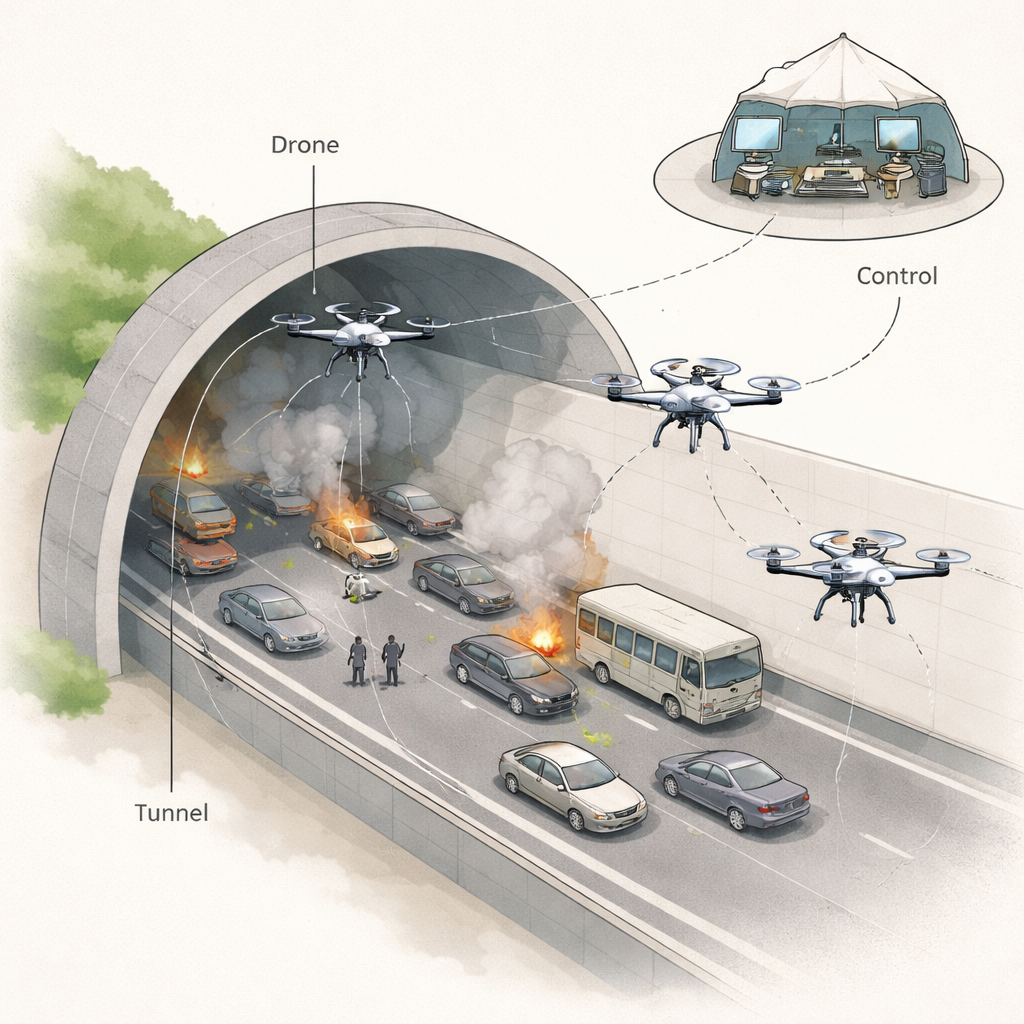
Quando um desastre ocorre em um túnel rodoviário — seja por um acidente, incêndio ou colapso estrutural — pessoas podem ficar presas em um tubo longo, enevoado e labiríntico com pouquíssas saídas. Os socorristas humanos precisam avançar justamente quando a visibilidade cai, as temperaturas sobem e os escombros bloqueiam o caminho. Este estudo explora como pequenos robôs voadores, ou drones, guiados por uma estratégia de aprendizado inteligente, podem se tornar ajudantes rápidos e confiáveis nessas situações perigosas, encontrando vítimas e traçando rotas seguras enquanto mantêm as equipes humanas longe dos piores riscos.
Gargalos subterrâneos perigosos
Cidades modernas dependem de túneis para rodovias, trens e serviços, mas o mesmo design confinado que os torna eficientes também faz com que acidentes dentro deles sejam incomumente letais. Incêndios espalham fumaça rapidamente, gases tóxicos se acumulam e passagens estreitas podem ficar congestionadas com veículos batidos ou concreto caído. Equipes de resgate tradicionais muitas vezes entram com informação limitada, adivinhando para onde ir enquanto seus rádios lutam para operar através de rocha e concreto espessos. Desastres passados na China e no Japão, entre outros, mostraram como é difícil alcançar as vítimas a tempo, ressaltando a necessidade de ferramentas que possam ver e pensar adiante de maneiras que os humanos não conseguem.
Ensinando drones a explorar e procurar
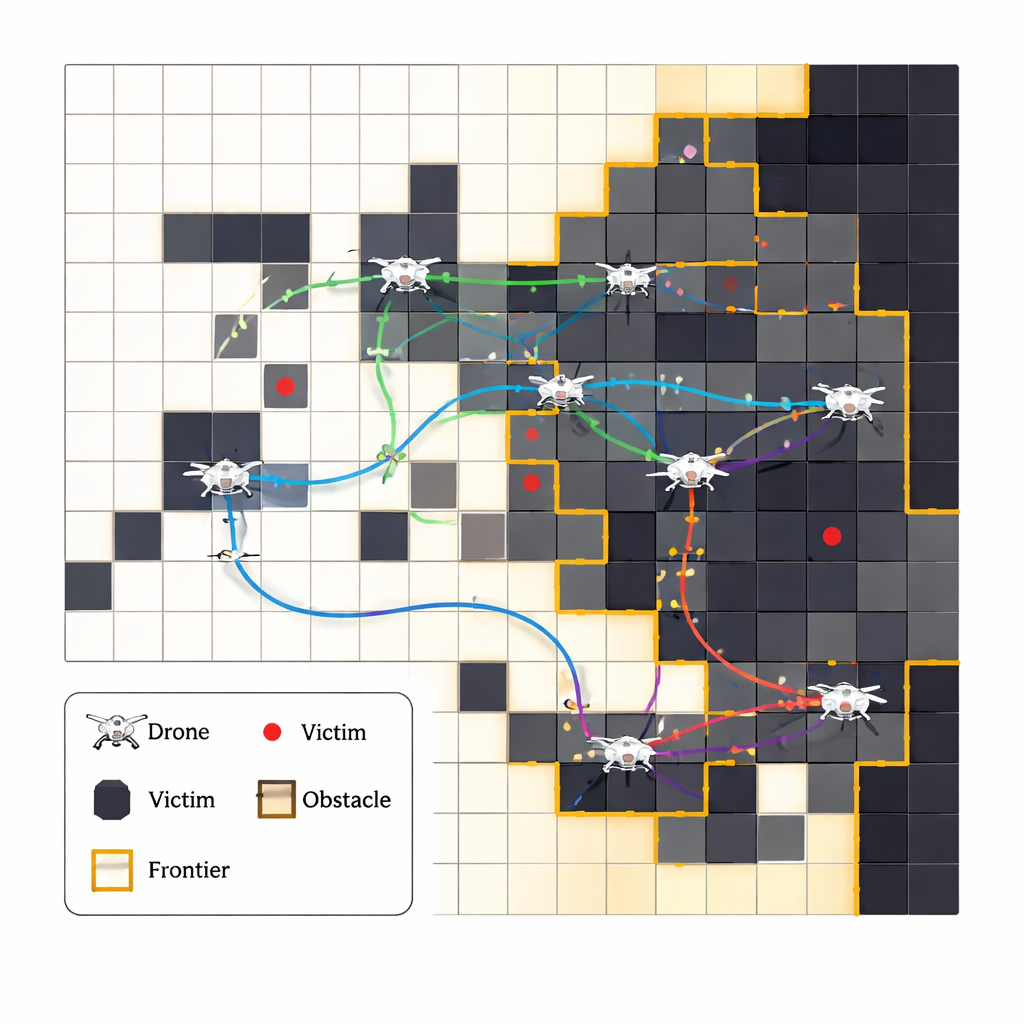
Os autores propõem um sistema em que vários drones autônomos trabalham juntos para explorar um túnel danificado, construir um mapa em tempo real e localizar pessoas presas. Em vez de seguir uma rota fixa e pré‑programada, cada drone aprende com a experiência usando um método chamado aprendizado por reforço: ele tenta ações, observa o que acontece e gradualmente descobre quais escolhas tendem a levar a resgates mais rápidos e a menos erros. O túnel é representado como uma grade de células, e os drones se concentram em “fronteiras” onde o espaço conhecido encontra o desconhecido, empurrando essa fronteira para fora de forma contínua. A cada passo, eles escolhem entre um pequeno conjunto de movimentos na grade, atualizando suas tabelas internas sobre quais movimentos funcionaram melhor em situações semelhantes anteriormente.
Fazer muitos robôs cooperarem sem comunicação intensa
Fazer vários drones vasculharem o mesmo túnel ao mesmo tempo levanta um novo desafio: como evitar que eles colidam entre si ou escaneiem repetidamente a mesma área, especialmente quando a comunicação pode ser instável? Em vez de lhes dar um chefe central ou conversas de rádio constantes, os pesquisadores desenham um sistema de pontuação simples que incentiva discretamente um bom comportamento de grupo. Um drone ganha uma grande recompensa quando descobre uma nova vítima, mas é penalizado se perder tempo revisitanto o mesmo lugar, colidir com outro drone ou “falhar” ao esgotar sua bateria. Com o tempo, isso empurra cada drone a favorecer regiões não exploradas e manter distância dos colegas, de modo que uma forma de cooperação emerge naturalmente das consequências compartilhadas, mesmo que cada um aprenda tecnicamente por conta própria.
Pegando truques de lobos para evitar ficar preso
O aprendizado puramente por tentativa e erro pode às vezes ficar preso em hábitos seguros, porém subótimos — como sempre escolher um corredor familiar em vez de experimentar um atalho arriscado. Para manter os drones curiosos, a equipe toma ideias de um modelo matemático de como lobos‑cinzentos caçam em matilha. Esse componente de “Otimização do Lobo Cinzento” incentiva os drones a, ocasionalmente, imitar os padrões de busca de melhor desempenho observados até então, mantendo espaço para exploração. Na prática, isso molda quais novas ações são testadas, ajudando o processo de aprendizado a sair de becos sem saída e a se adaptar quando o túnel muda — por exemplo, se parte da rota de repente fica bloqueada por fogo ou detritos.
Testando a abordagem em desastres virtuais
Como não é seguro testar estratégias não comprovadas em túneis de emergência reais, os pesquisadores construíram simulações de computador detalhadas que imitam corredores estreitos, becos sem saída, obstáculos e vítimas espalhadas. Eles comparam seu sistema baseado em aprendizado com vários outros métodos, incluindo vaga‑aleatoriedade pura e otimização isolada sem aprendizado. Tanto em testes com um único drone quanto com múltiplos drones, sua abordagem encontra vítimas mais rápido, explora mais do túnel com menos passos desperdiçados e evita colisões de forma mais confiável. Importante, faz isso usando cálculos leves baseados em tabelas em vez de redes de deep learning famintas por energia, o que significa que poderia rodar realisticamente em pequenos computadores embarcados durante uma emergência real.
O que isso pode significar para resgates futuros
O estudo mostra que enxames de drones relativamente simples, guiados por regras de aprendizado cuidadosamente projetadas e por algumas ideias emprestadas da natureza, poderiam se tornar parceiros valiosos para bombeiros e equipes de resgate em desastres em túneis. Ao mapear rapidamente ambientes enevoados e instáveis e focalizar locais prováveis de vítimas sem controle humano constante, tais sistemas poderiam reduzir preciosos minutos nos tempos de resposta e diminuir os riscos enfrentados pelos primeiros socorristas. Embora o trabalho até agora se baseie em simulações e sensores ideais, ele estabelece uma base prática para sistemas reais futuros que precisam operar sob limites apertados de tempo, energia e computação em alguns dos cenários de resgate mais desafiadores do planeta.
Citação: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Palavras-chave: resposta a emergências em túneis, drones de busca e resgate, aprendizado por reforço multiagente, gestão robótica de desastres, exploração autônoma