Clear Sky Science · pt
Estimativa em tempo real do SOC da bateria e estratégia autônoma de recarga para robô de armazenamento de energia dinâmico com filtro de Kalman estendido
Por que baterias mais inteligentes importam
De mensageiros de depósito a robôs de inspeção, robôs móveis são tão úteis quanto suas baterias permitem. Se um robô subestima quanto de energia lhe resta, pode parar longe de um carregador, interrompendo o trabalho e arriscando danos à bateria. Este artigo apresenta uma nova forma de o robô “saber” seu nível real de carga em tempo real e escolher quando e como recarregar-se, para que possa trabalhar por mais tempo, com mais segurança e com menos supervisão humana.

Robôs, tarefas intensas e baterias estressadas
Diferentemente de carros elétricos que trafegam suavemente em autoestradas, muitos robôs móveis enfrentam arranques bruscos, paradas e mudanças frequentes de carga de trabalho. Esses solavancos provocam variações rápidas na corrente e na tensão da bateria, que confundem métodos tradicionais de estimativa da carga restante. Métodos simples que leem a tensão da bateria ou apenas acumulam corrente ao longo do tempo tendem a assumir condições calmas e estáveis e não acompanham como a bateria envelhece ou aquece. Como resultado, suas estimativas derivam, os erros se acumulam, e o robô pode tanto recarregar com excesso de frequência quanto forçar demais a bateria, reduzindo sua vida útil.
Um modelo mais inteligente do que ocorre dentro da bateria
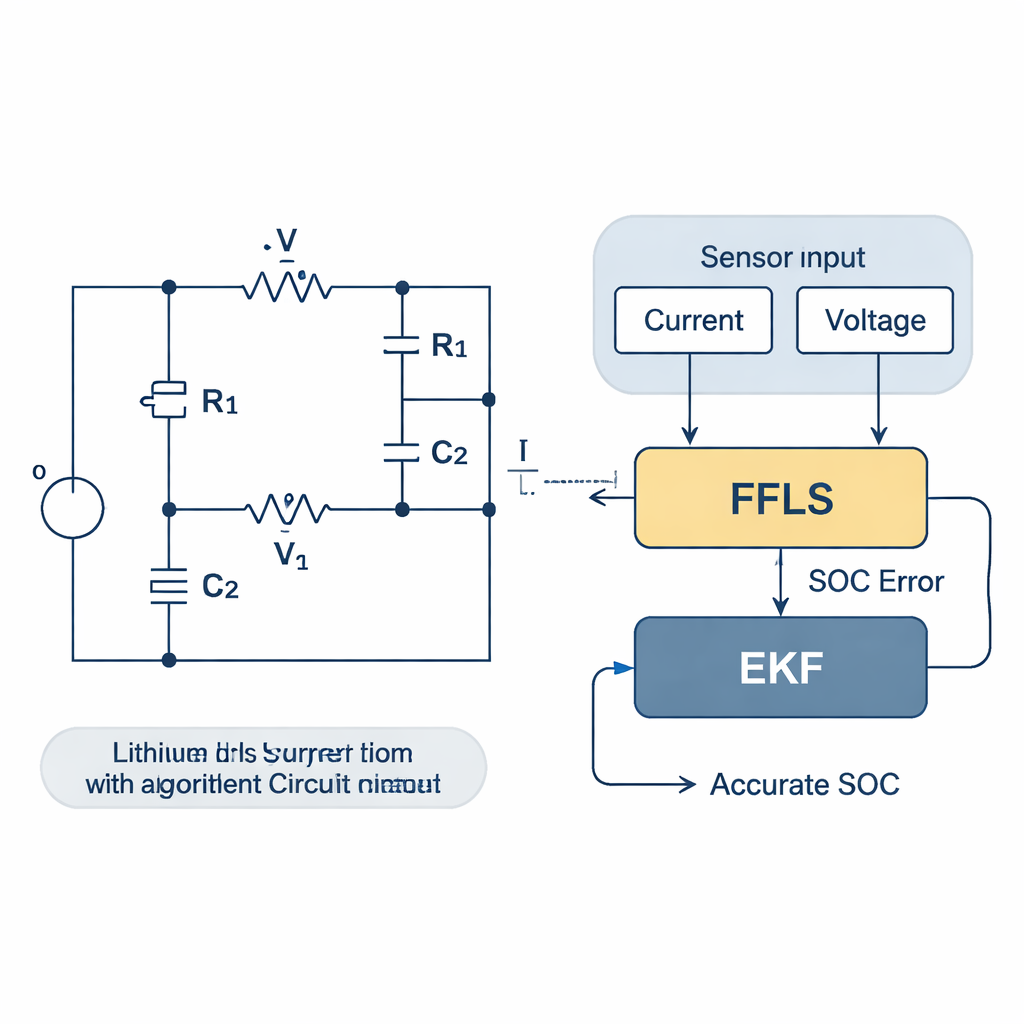
Os autores enfrentam isso dando ao robô uma imagem mais realista do seu conjunto de baterias de fosfato de ferro-lítio. Em vez de tratar a bateria como uma caixa preta com um único número de tensão, eles a representam como uma rede elétrica com resistência interna e dois ramos de “polarização” que imitam como os íons se movem e se acumulam dentro da célula. Esse modelo RC de segunda ordem captura respostas rápidas e lentas às variações de carga. O robô mede continuamente corrente e tensão e ajusta esses sinais ao modelo usando um método dos mínimos quadrados que inclui um “fator de esquecimento” — uma técnica matemática para dar mais peso a dados recentes e desbotar histórico desatualizado quando as condições mudam.
Deixar o algoritmo aprender e se adaptar em operação
Sobre esse modelo, a equipe aplica um filtro de Kalman estendido, uma ferramenta amplamente usada para rastrear estados ocultos em dados ruidosos. Aqui, o estado oculto é o verdadeiro estado de carga da bateria. À medida que o robô opera, o filtro prevê como a carga deve mudar com base no modelo e na corrente medida, e então corrige essa previsão usando a tensão medida. O módulo de mínimos quadrados com fator de esquecimento continua atualizando parâmetros chave do modelo online, de modo que o filtro nunca dependa de uma descrição de bateria calibrada de fábrica e obsoleta. De forma inteligente, os pesquisadores também exploram uma ligação entre resistência interna e uma grandeza chamada capacitância de polarização: quando a temperatura sobe, a resistência cai e a capacitância cresce. Observando ambos em conjunto, o sistema consegue inferir efeitos de temperatura sem nenhum sensor físico de temperatura e ajustar o modelo conforme necessário.
Ensinar os robôs quando e como recarregar
Estimativas precisas de carga são apenas metade da história; a outra metade é como o robô as utiliza. Os autores projetam uma estratégia de recarga autônoma que evita tanto o “complemento” constante quanto descargas profundas. Eles definem limites superior e inferior de carga: se a bateria cai abaixo de um limiar, o robô prioriza retornar a uma base; se já estiver perto do limite superior, posterga a recarga e continua trabalhando. Dentro da faixa segura, o robô recarrega durante momentos de inatividade. O sistema também monitora cada célula do pack e equilibra suas cargas para que nenhuma célula fique sobrecarregada enquanto outras ficam para trás, um passo-chave para evitar envelhecimento prematuro. Para tornar o encaixe mais eficiente, o robô combina navegação a nível de ambiente com orientação infravermelha de curto alcance, encurtando trajetos e o tempo de acoplamento.
Bateria de robô mais duradoura e confiável
Em testes usando conjuntos de dados públicos de baterias, simulações e robôs reais, o novo método estimou o estado de carga com cerca de 98% de precisão, superando claramente várias alternativas avançadas baseadas em filtros de partículas, redes neurais e Transformers. Baterias gerenciadas com essa abordagem mantiveram melhor sua carga ao longo de semanas de uso simulado e sobreviveram a 15–40% mais ciclos de carga–descarga do que com métodos concorrentes. A resistência interna cresceu mais lentamente, um indicador de células mais saudáveis, e os robôs passaram menos tempo acoplados mantendo maior saúde das baterias. Para um público geral, a conclusão é que essa técnica permite aos robôs ser melhores “zeladores” de suas próprias baterias: podem avaliar sua energia com mais precisão, escolher momentos mais inteligentes para recarregar e prolongar discretamente a vida útil de packs de baterias caros sem sensores extras ou alto poder de computação.
Citação: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Palavras-chave: robôs móveis, estado de carga da bateria, recarga autônoma, filtro de Kalman estendido, baterias de fosfato de ferro-lítio