Clear Sky Science · pt
Pesquisa sobre detecção multiescala de características de trincas em estradas de minas a céu aberto
Por que trincas minúsculas em estradas de mina importam
Minas a céu aberto dependem de estradas longas e sinuosas para movimentar milhares de toneladas de rocha todos os dias. Quando essas estradas se racham, caminhões podem ser danificados, o tráfego desacelera e, nos piores casos, ocorrem acidentes. Ainda assim, essas trincas frequentemente começam como fissuras finas que são difíceis de ver a olho nu, especialmente em ambientes de mina empoeirados e com sombras. Este estudo apresenta um método de inteligência artificial (IA) que pode detectar e mapear trincas em estradas de minas a céu aberto com mais precisão e eficiência do que as técnicas existentes, abrindo caminho para operações mais seguras e mais econômicas.
O desafio de encontrar trincas em um ambiente hostil
Inspecionar as estradas das minas ainda é frequentemente feito por trabalhadores que caminham ou dirigem devagar ao longo das rotas de transporte e inspecionam visualmente a superfície. Essa abordagem é lenta, subjetiva e quase impossível de escalar pelos muitos quilômetros de estradas de uma mina grande. Truques clássicos de processamento de imagem, como limiarização simples ou detecção de bordas, também têm dificuldade porque as estradas a céu aberto são visualmente desordenadas: pedras soltas, marcas de pneus, poças d’água e contrastes de iluminação intensos criam padrões que podem ser confundidos com trincas. Mesmo modelos modernos de aprendizado profundo têm problemas nesse cenário, porque as trincas são finas, fragmentadas e às vezes parcialmente cobertas por detritos, e redes padrão tendem a perder esses detalhes finos.
Um modelo de IA que funde detalhes de vários níveis
Para superar esses obstáculos, os autores partem do U‑Net, uma rede de segmentação de imagem popular, e redesenham a forma como ela combina informações. Seu Módulo Adaptativo de Fusão de Recursos funciona como um misturador inteligente que reúne características em várias escalas da imagem — desde texturas finas próximas ao nível do pixel até formas amplas — e as alinha para o mesmo tamanho. Em seguida, usa duas etapas de atenção: uma que aprende quais canais carregam as pistas de trinca mais úteis e outra que injeta informação sobre a cena mais ampla. Ao reponderar dinamicamente essas entradas, o módulo reforça sinais fracos de trinca enquanto reduz distrações como sombras e cascalho, resultando em bordas de trinca mais nítidas no mapa de saída. 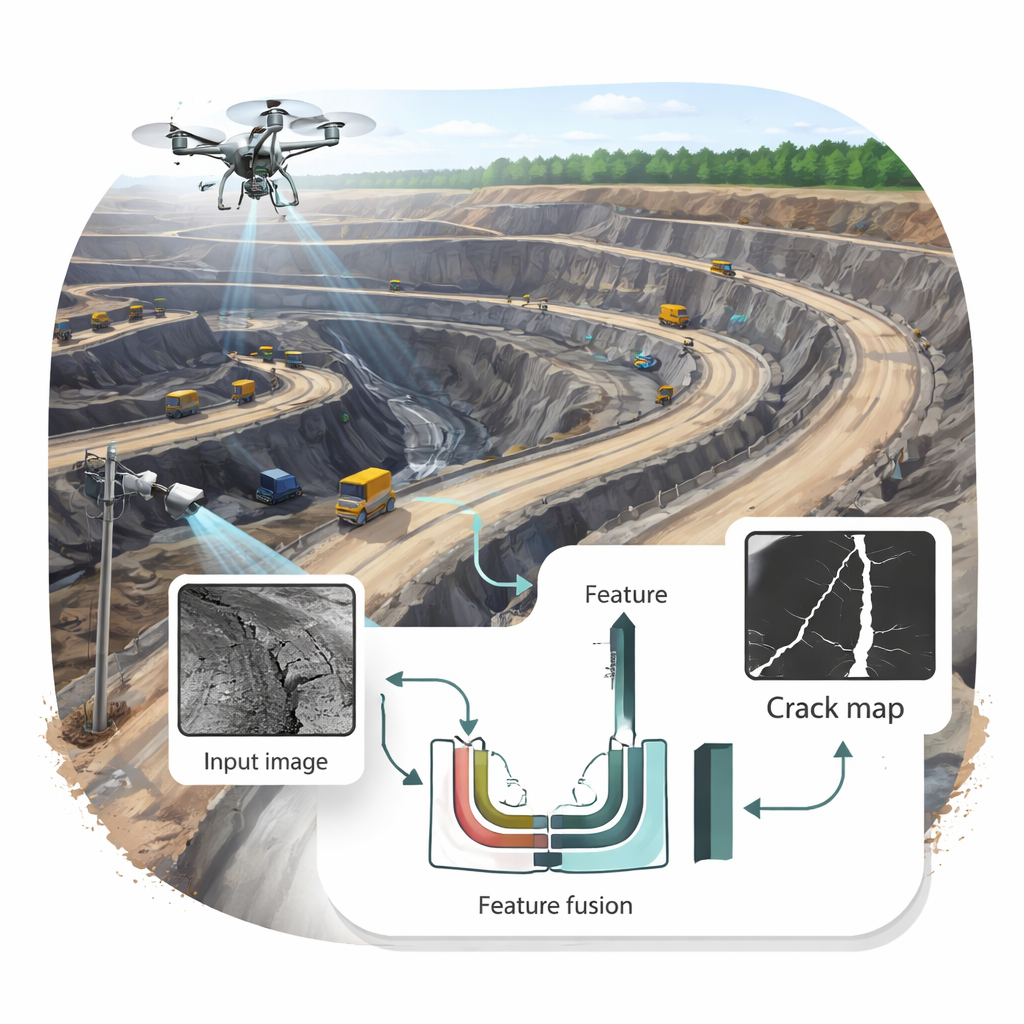
Ensinando a rede onde procurar
Além de fundir recursos, os pesquisadores introduzem um Módulo de Atenção Canal‑Espacial que ensina a rede tanto o que observar quanto onde observar. Inspirado em técnicas de autoatenção amplamente usadas em modelos de linguagem, ele primeiro analisa como diferentes canais de características se relacionam entre si, perguntando efetivamente quais combinações tendem a indicar “isto é uma trinca”. Em seguida, adiciona uma etapa de atenção espacial que destaca as regiões exatas da imagem onde as trincas têm maior probabilidade de aparecer. Em conjunto, essas etapas ajudam o modelo a separar texturas de trinca de fundos confusos e a manter fissuras finas e sinuosas contínuas, mesmo quando partes estão obscuras ou com baixo contraste.
Tornando a IA rápida o bastante para o campo
A alta precisão por si só não basta para uma mina em operação, onde computadores podem estar em caminhões, escritórios de campo ou drones com poder de processamento limitado. Para isso, a equipe aplica uma estratégia de poda chamada Poda por Magnitude Adaptativa por Camada. Em termos simples, ela mede quão importante cada grupo de pesos internos é para as decisões do modelo e então elimina os menos úteis, camada por camada. Até um nível moderado de poda, a rede fica mais enxuta e rápida — reduzindo aproximadamente um quarto de seus parâmetros e quase um terço das operações — sem prejudicar, e neste caso até melhorando ligeiramente, a precisão da detecção. O modelo final consegue processar um bloco de imagem em cerca de um terço de segundo, tornando viável a triagem de trincas em tempo quase real.
Quão bem o sistema funciona em minas reais
Os pesquisadores testaram seu método em 2.847 imagens de alta resolução coletadas em uma mina de carvão a céu aberto na Mongólia Interior, cobrindo uma ampla variedade de superfícies de estrada, condições de iluminação e formas de trinca. Em comparação com o U‑Net original e vários outros modelos de segmentação bem conhecidos, a rede melhorada obteve maior sobreposição com máscaras de trinca desenhadas por humanos, menos alarmes falsos e melhor continuidade para trincas pequenas ou parcialmente ocultas. Ao mesmo tempo, rodou mais rápido e exigiu menos memória que muitos concorrentes. Esses ganhos sugerem que a abordagem não é apenas forte academicamente, mas também prática para implantação em dispositivos de borda, como servidores no local da mina, câmeras ou plataformas de drones. 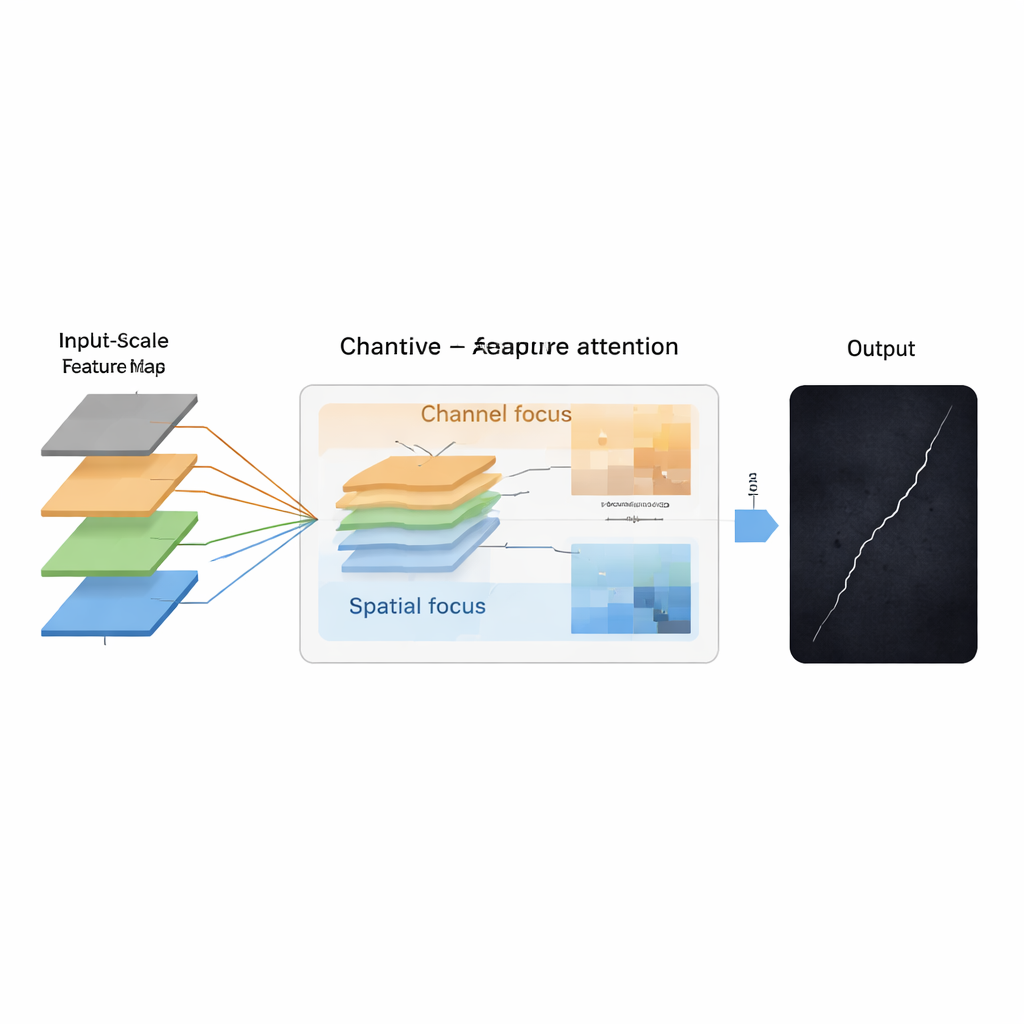
O que isso significa para operações de mina mais seguras
Para um não especialista, a conclusão é que este trabalho transforma imagens brutas de estradas empoeiradas de mina em mapas de trincas precisos e legíveis por máquina usando um modelo de IA compacto. Isso torna possível escanear longos trechos de estrada com frequência — potencialmente por drones ou câmeras montadas em veículos — e identificar onde a manutenção é realmente necessária antes que pequenos defeitos se tornem riscos sérios. Embora desafios persistam em condições extremamente ruidosas ou incomuns, essa abordagem baseada em fusão de características e atenção representa um passo importante rumo a uma manutenção rodoviária mais inteligente e preventiva em grandes minas a céu aberto.
Citação: Wang, L., Zhao, M., Yu, Z. et al. Research on multi-scale feature detection of open-pit mine road cracks. Sci Rep 16, 6060 (2026). https://doi.org/10.1038/s41598-026-37153-2
Palavras-chave: estradas de minas a céu aberto, detecção de trincas, visão computacional, aprendizado profundo, segurança de infraestrutura