Clear Sky Science · pt
Cadeia dinâmica para agendamento de sistemas multi-AGV com perfil de movimento sensível à carga
Por que robôs de armazém precisam de melhor sincronização
O comércio eletrônico encheu os armazéns de mercadorias que precisam ser movimentadas de forma rápida, segura e ininterrupta. Muitas instalações hoje dependem de frotas de robôs de chão — Veículos Guiados Automatizados, ou AGVs — para transportar prateleiras e paletes. Mas se esses robôs são escalonados com suposições simplificadas sobre seu movimento, eles podem desperdiçar tempo, sacudir pacotes frágeis ou até correr risco de colisões. Este artigo apresenta uma nova forma de planejar e coordenar muitos AGVs simultaneamente levando em conta seu comportamento físico real, prometendo tráfego mais suave e carga mais segura em armazéns movimentados.
Robôs que movimentam cargas, não apenas números
AGVs modernos já cruzam armazéns, aeroportos e fábricas, rebocando carrinhos ou erguendo prateleiras e paletes. A maior parte do software que gerencia essas frotas opera em alto nível: decide qual robô deve executar cada tarefa e, de forma aproximada, qual rota ele deve seguir. Para simplificar os cálculos, normalmente assume-se que o tempo de viagem entre dois pontos é fixo, ignorando quão rápido um robô pode acelerar ou frear, ou quão pesada é sua carga. Os autores mostram que esse artifício gera problemas em ambientes reais. Robôs podem chegar a cruzamentos mais cedo ou mais tarde do que o esperado, aumentando a chance de congestionamento, quase-colisões ou frenagens bruscas que sacodem o que estiverem transportando.
Adicionando física do mundo real ao cronograma
Os pesquisadores tratam essa lacuna com uma abordagem em duas etapas que mistura física e agendamento. Primeiro, eles projetam um estimador de Tempo de Viagem Dinâmico para AGVs, chamado DTT-AGV. Em vez de tratar um corredor como um único bloco de tempo, o DTT-AGV divide cada movimento em fases: aceleração, cruzeiro em velocidade constante e desaceleração. Ele usa um modelo mecânico simples de um AGV carregando uma prateleira, onde a prateleira se comporta como uma massa ligada por molas e amortecedores. Esse modelo captura como acelerações e desacelerações podem fazer a carga oscilar ou vibrar. A partir disso, o algoritmo calcula quão rápido o veículo pode se mover com segurança para uma dada distância e carga sem exceder limites de velocidade, força ou vibração, e retorna um tempo de viagem realista para cada segmento do trajeto.
Impedindo que robôs se encontrem frente a frente
Em segundo lugar, a equipe introduz um método de Encadeamento de Tempos de Chegada, ATC-AGV, que coordena muitos robôs em caminhos compartilhados. Depois que o DTT-AGV estima quanto tempo cada segmento levará, o ATC-AGV atribui tempos precisos de chegada e partida em cada nó — interseções, curvas ou pontos de transferência — ao longo da rota de cada robô. Ele constrói uma “cadeia” temporal em cada nó compartilhado, garantindo um espaço seguro entre veículos enquanto considera os estados atuais dos robôs, como se estão carregados, carregando bateria ou fazendo uma curva. Se um novo plano faria com que dois AGVs ocupassem o mesmo nó muito próximos no tempo, o ATC-AGV desloca o cronograma de um dos robôs o suficiente para restaurar a margem de segurança. Na prática, isso transforma a grade do piso do armazém em um mapa sensível ao tempo que ajuda a prevenir colisões antes que elas ocorram.
Testando movimento mais suave e viagens mais gentis
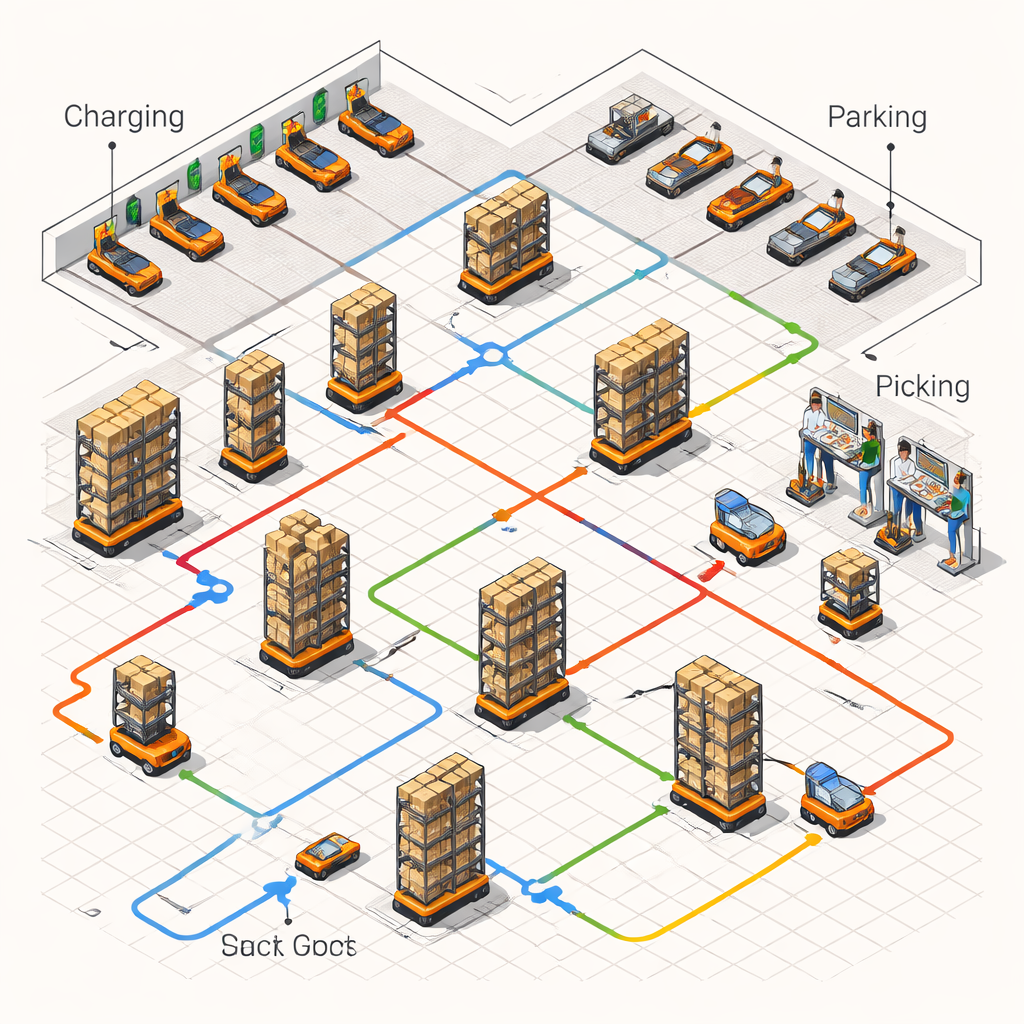
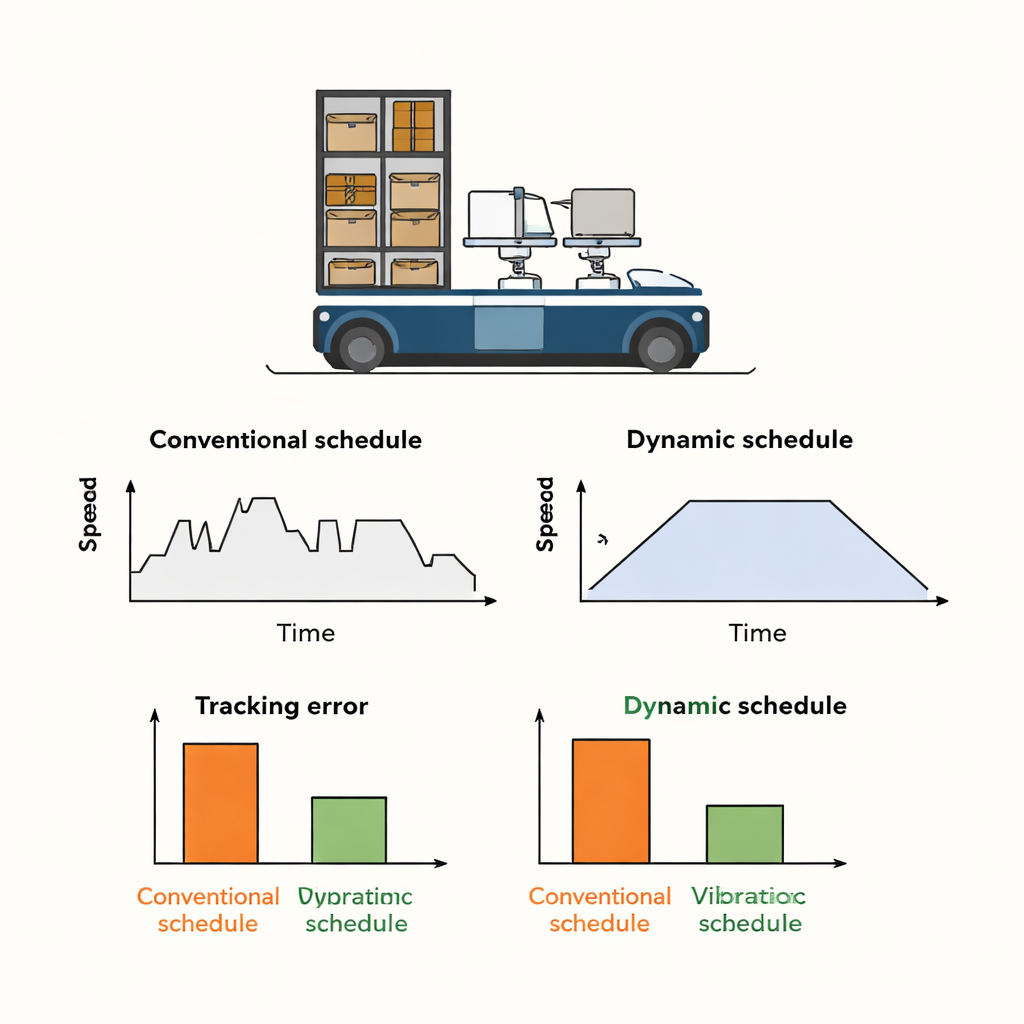
Para testar suas ideias, os autores simulam AGVs em um armazém de cross-docking em grade que inclui áreas de carregamento, vagas de estacionamento e zonas de prateleiras. Eles comparam seu planejador com um método convencional que assume velocidade quase constante e ignora fases detalhadas de movimento. Em um teste, um robô percorre um trajeto em forma de L e depois vira 90 graus. A abordagem tradicional gera mudanças bruscas de velocidade na esquina, que o robô real não consegue seguir perfeitamente. O resultado são grandes erros de rastreamento — diferenças entre onde o robô deveria estar e onde ele realmente está — e picos de erro de temporização em pontos críticos. Com o novo planejador, o trajeto é dividido em claras fases de aceleração, cruzeiro e frenagem. O robô simulado agora segue o caminho alvo de forma mais próxima, com erros muito menores e curvas mais suaves.
Mais suave para as embalagens e preparado para o futuro
O segundo conjunto de testes foca em como a própria carga se comporta. Quando o cronograma convencional é usado, a base do robô sofre solavancos súbitos de aceleração que excitam o comportamento elástico da prateleira, causando vibrações fortes na carga. Com o cronograma dinâmico sensível à carga, as acelerações permanecem dentro de uma faixa mais estreita e mudam de forma mais suave. Medidas ao longo do tempo mostram que tanto os picos quanto as vibrações médias da carga caem drasticamente, o que é crítico para itens frágeis, empilhados ou instáveis. Os autores também investigam como fatores negligenciados, como a fricção roda-piso, podem afetar suas estimativas e encontram que, sob condições típicas de armazém, o erro de temporização adicional fica dentro das margens de segurança incorporadas no algoritmo.
O que isso significa para armazéns reais
Em termos simples, este trabalho ensina os escalonadores de AGV a respeitar o movimento real das máquinas que controlam. Ao basear tempos de viagem e decisões de prioridade em quão rapidamente os robôs realmente podem acelerar, frear e transportar diferentes cargas sem agitá-las em excesso, a estrutura proposta reduz erros de seguimento de trajeto, diminui a vibração da carga e reduz o risco de conflitos em interseções. Para operadores de armazéns e fabricantes, isso se traduz em tráfego mais fluido, manuseio mais seguro de mercadorias e uma base que pode escalar à medida que as frotas crescem e os layouts se tornam mais complexos.
Citação: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Palavras-chave: veículos guiados automatizados, robótica de armazéns, agendamento sem colisões, planejamento de movimento, logística inteligente