Clear Sky Science · pt
Um framework de segmentação YOLO11n leve para detecção de trincas em superfícies em tempo real
Por que trincas pequenas importam
Trincas ocultas em estradas, pontes e edifícios podem parecer inofensivas, mas frequentemente são os primeiros sinais de que uma estrutura está se degradando. Detectar essas fissuras cedo pode evitar reparos caros ou até falhas desastrosas. Ainda assim, a maioria das inspeções é feita por pessoas andando ou dirigindo lentamente ao longo das superfícies, anotando manualmente. Este estudo investiga como um sistema de inteligência artificial compacto pode identificar e delinear trincas em tempo real, rápido o suficiente para rodar em drones, pequenos robôs e sensores de baixo consumo em vez de apenas em centros de dados poderosos.
Das checagens manuais à visão por máquina
Engenheiros há muito tentam automatizar a detecção de trincas usando truques tradicionais de processamento de imagem, como detecção de bordas e limiarização. Esses métodos funcionam em ambientes limpos de laboratório, mas rapidamente falham no mundo real, onde sombras, manchas e texturas ásperas confundem algoritmos simples. Mais recentemente, o aprendizado profundo mudou o jogo: redes neurais podem aprender a aparência das trincas diretamente a partir das imagens. Versões iniciais podiam indicar se um pequeno trecho de imagem continha uma trinca, mas tinham dificuldade em marcar exatamente onde a trinca estava e muitas vezes eram lentas demais para inspeções ao vivo.
Como um modelo enxuto aprende a ver trincas
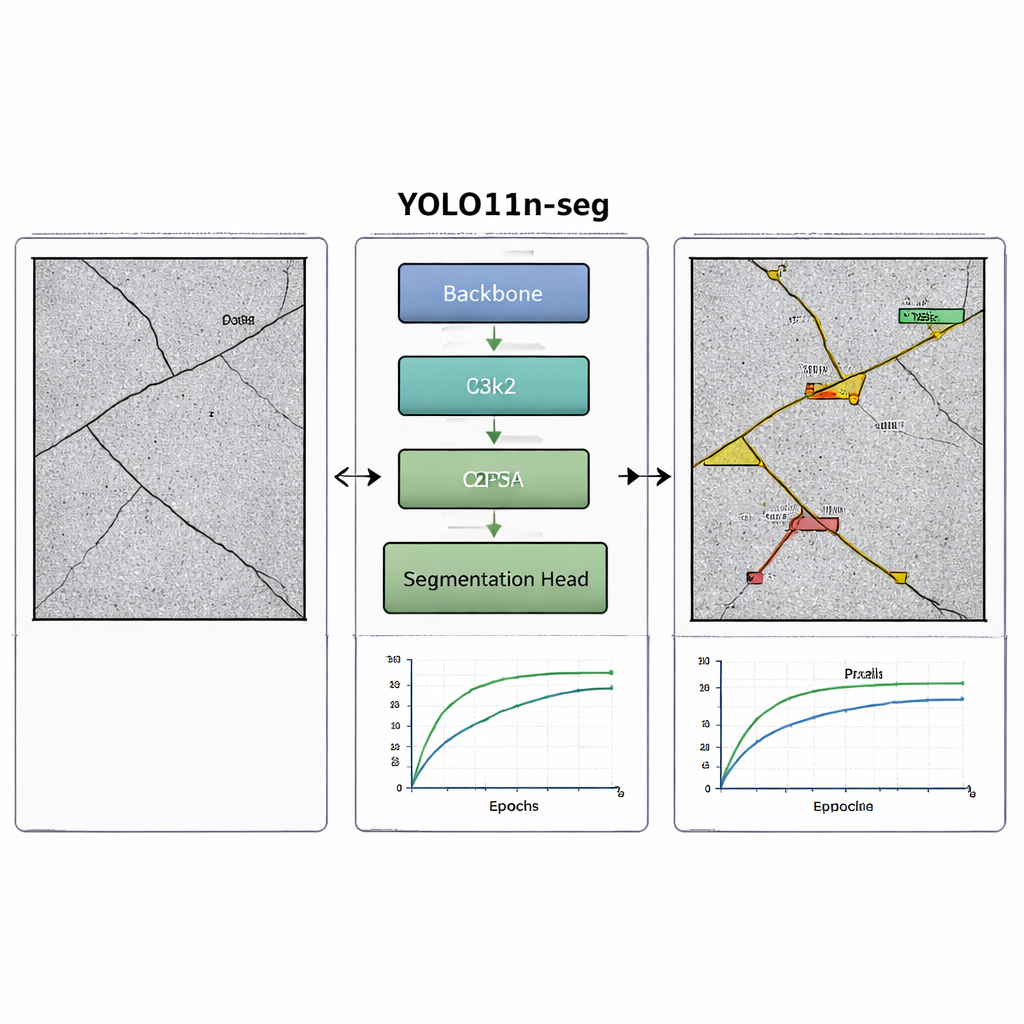
Os autores partem da família de modelos YOLO, um conjunto popular de ferramentas em visão computacional conhecido por detectar objetos em uma única e rápida passagem pela rede. Eles se concentram em uma versão muito pequena chamada YOLO11n-seg, adaptada para traçar a forma exata das trincas, não apenas desenhar caixas aproximadas ao redor delas. O modelo é treinado no conjunto de dados Crack-Seg, que contém mais de 11.000 imagens de rodovias cuidadosamente rotuladas onde cada pixel de trinca é marcado. As imagens são redimensionadas para um formato padrão e alimentadas na rede, que gradualmente aprende a distinguir os padrões finos e sinuosos de dano real de detalhes de fundo inofensivos, como textura ou sujeira.
Truques inteligentes para detalhes minúsculos
Para localizar fissuras capilares em concreto áspero, o modelo usa dois artifícios de projeto. Primeiro, um bloco especial chamado C3k2 alterna automaticamente entre janelas de observação pequenas e ligeiramente maiores, permitindo acompanhar tanto trincas muito finas quanto as mais longas. Segundo, um módulo de atenção espacial chamado C2PSA ensina o modelo a focar em regiões prováveis de trinca enquanto ignora distrações como manchas de óleo, sombras ou superfícies padronizadas. Juntos, esses acréscimos ajudam o sistema a delinear as trincas de forma mais limpa e reduzem a chance de confundir imperfeições de fundo com dano estrutural, tudo mantendo o modelo pequeno o suficiente para rodar em hardware modesto.
Resultados rápidos sem hardware pesado
Em testes, a rede leve contém apenas cerca de 2,8 milhões de parâmetros — ínfimo comparado a muitos sistemas modernos de aprendizado profundo — e ainda assim apresenta desempenho similar ao de designs maiores e mais lentos. No benchmark Crack-Seg, ela identifica corretamente as regiões de trinca com uma precisão de cerca de 79% e alcança pontuações fortes quanto ao quão bem as formas de trinca previstas correspondem à verdade de solo. Crucialmente, processa cada imagem em aproximadamente 3,6 milissegundos em uma GPU padrão, o que corresponde a centenas de quadros por segundo. Em comparação com modelos amplamente usados, como U-Net, Mask R-CNN e uma variante anterior do YOLO, oferece precisão de segmentação competitiva ou superior enquanto é dramaticamente mais rápida, tornando-a prática para fluxos de vídeo contínuos de drones ou veículos de inspeção.
Rumo a checkups estruturais automáticos
Para não especialistas, a principal conclusão é que este trabalho demonstra ser possível construir ferramentas de IA pequenas e eficientes que não apenas detectam trincas, mas também traçam sua forma e tamanho exatos rápido o suficiente para monitoramento em tempo real. Embora trincas extremamente tênues em condições de iluminação ruim ou clima adverso ainda sejam desafiadoras, o sistema YOLO11n-seg proposto oferece um equilíbrio promissor entre velocidade e confiabilidade. Com melhorias adicionais e integração em equipamentos de campo, tais modelos podem ajudar cidades e órgãos a detectar danos mais cedo, priorizar reparos e manter infraestruturas vitais mais seguras com menos esforço manual.
Citação: Tiwari, S., Gola, K.K., Kanauzia, R. et al. A lightweight YOLO11n seg framework for real time surface crack detection with segmentation. Sci Rep 16, 6566 (2026). https://doi.org/10.1038/s41598-026-37073-1
Palavras-chave: trincas em infraestrutura, visão computacional, aprendizado profundo, inspeção em tempo real, segmentação YOLO