Clear Sky Science · pt
Posicionamento de quadrotor em superfícies usando controle contínuo adaptativo de segunda ordem na presença de incertezas
Por que prender drones em paredes importa
Imagine um pequeno drone que não apenas paira até a bateria acabar, mas que pode pousar silenciosamente em uma parede como um pássaro e ficar lá por horas observando uma ponte, uma lavoura ou a borda de uma floresta. Este artigo apresenta uma nova forma de controlar esses drones “posicionados” para que possam voar até uma superfície vertical, fazer contato sem ricochetear e aderir ali de forma estável mesmo quando o ar está turbulento ou o comportamento do drone não é perfeitamente conhecido. O trabalho enfrenta o desafio de transformar uma máquina de voo delicada em uma ferramenta de inspeção confiável e econômica em energia.
De robôs pairando a batedores que se agarram a paredes
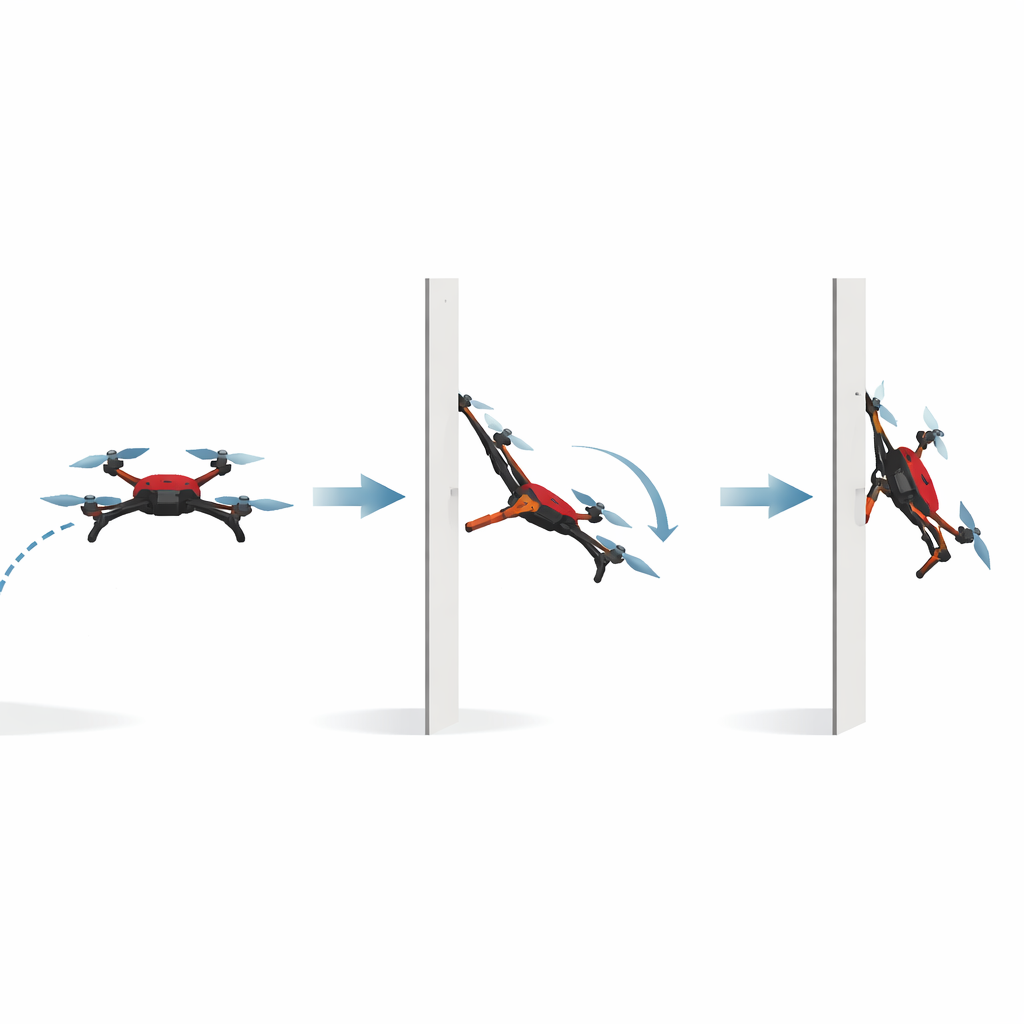
Drones pequenos de quatro rotores, ou quadrotors, já são usados para mapeamento, inspeção de construções, monitoramento de vida selvagem e agricultura de precisão. Ainda assim, sua maior limitação é a autonomia: permanecer pairando consome muita bateria. Posicionar‑se numa superfície — como uma parede, poste ou a parte inferior de uma ponte — permite ao drone desligar a maior parte dos motores enquanto mantém seus sensores no lugar para observação de longo prazo. Fazer isso com segurança está longe de ser trivial. Durante a manobra curta mas crítica de posicionamento, o drone deve se aproximar da parede, tocá‑la e girar para uma postura com a frente apontando para baixo sem ricochetear, deslizar ou perder o controle quando rajadas inesperadas ou erros de modelagem perturbam seu movimento.
O desafio de um pouso limpo na parede
Os autores estudam um quadrotor equipado com um braço de suporte leve na frente, que atua como ponto de contato físico com a parede. À medida que o drone faz a transição do voo livre para o contato, sua posição (lateral, frontal, vertical) e sua atitude (ângulos de roll, pitch e yaw) ficam fortemente acopladas: mudar a orientação altera como o empuxo se traduz em movimento, e a reação súbita da parede pode torcer a fuselagem. Além disso, efeitos do mundo real — como interações aerodinâmicas próximas à parede, pequenas imprecisões de construção e ruído nos sensores — atuam como distúrbios desconhecidos. As técnicas de controle robusto existentes conseguem manter os drones estáveis, mas frequentemente causam “chattering” de alta frequência nos comandos dos motores, desgastam o hardware e só garantem que os erros diminuam gradualmente em vez de dentro de uma janela de tempo previsível e curta.
Uma forma mais inteligente de equilibrar e se adaptar
Para superar essas questões, o artigo introduz um esquema de controle contínuo adaptativo de segunda ordem (ASOCC). Em termos simples, o controlador observa não apenas o quanto o movimento do drone está distante do alvo, mas também a rapidez com que esse erro está mudando, e molda seus comandos para que ambos cheguem a zero em tempo finito. Um observador de distúrbio embutido funciona como um “ouvinte de ruído” em tempo real, estimando o efeito líquido de forças desconhecidas e discrepâncias do modelo e alimentando essa informação de volta na lei de controle. Crucialmente, os ganhos que determinam a intensidade da reação do controlador são ajustados em tempo de execução com base nessas estimativas, em vez de serem fixos previamente. Como os sinais de controle mudam de forma suave em vez de com comutações abruptas, o projeto reduz consideravelmente o chattering ao mesmo tempo em que mantém forte robustez.
Testando o novo controle
Os pesquisadores primeiro analisam a matemática do par observador‑controlador e provam, usando funções estilo Lyapunov de energia, que todos os erros de movimento convergem para zero em tempo finito apesar de distúrbios limitados. Em seguida, simulam cenários agressivos de posicionamento em software, submetendo o modelo do drone a forças semelhantes ao vento, ruído aleatório nas medições e erros intencionais em seus parâmetros físicos. Nessas experiências, o ASOCC guiou o drone por três estágios — preparação, aproximação e posicionamento — mantendo os erros de posição e orientação pequenos e os comandos de controle suaves. Quando comparado com várias alternativas avançadas, incluindo controladores de modo deslizante e baseados em modelo populares, o novo método reduziu medidas-chave de erro de rastreamento em cerca de 35–55 por cento.
Da simulação a um drone real na parede
Indo além das simulações, a equipe construiu um quadrotor de posicionamento em escala usando uma placa de voo comercial e uma estrutura impressa em 3D com um braço frontal. Em experimentos em ambiente interno, o drone voou autonomamente em direção a uma parede inclinada, subiu para cerca de um metro e então inclinou o nariz para baixo para fazer contato e permanecer preso. Séries temporais mostram que altitude, posição horizontal e ângulo de pitch seguem de perto as trajetórias desejadas, com apenas pequenas ondulações devido ao ruído dos sensores. Apesar do hardware de baixo custo, atrasos de comunicação e limites dos atuadores, o drone não ricocheteou nem entrou em oscilações após o impacto, demonstrando que o ASOCC pode lidar com as realidades desordenadas do voo.
O que isso significa para os inspetores voadores do futuro
Para leigos, o resultado principal é direto: este trabalho entrega uma estratégia de controle que permite a pequenos drones aderir de forma confiável a superfícies verticais e permanecer nelas, mesmo quando as condições são imperfeitas. Ao combinar um controle suave porém fortemente corretivo com um observador de distúrbio adaptativo, o método possibilita um posicionamento rápido e preciso sem o tremor e o estresse de hardware observados em muitos controladores robustos. Isso abre caminho para monitoramento aéreo de longa duração com baterias mais leves, plataformas mais simples e maior segurança — um passo importante rumo a frotas de robôs autônomos “agarrados à parede” que vigiam silenciosamente infraestrutura, plantações e ambientes naturais.
Citação: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Palavras-chave: posicionamento de quadrotor, controle adaptativo, inspeção por drone, observador de distúrbio, robótica aérea