Clear Sky Science · pt
Um modelo leve baseado em YOLO para detecção precisa de cachos de pimenta‑vermelha na colheita robótica
Robôs mais inteligentes para colheitas picantes
Os grãos de pimenta Sichuan, as pequenas cápsulas vermelhas que dão à culinária de Sichuan sua característica sensação formigante, são surpreendentemente difíceis de colher. Os frutos crescem em cachos densos e espinhosos que podem facilmente ser danificados, e a colheita manual é um trabalho lento e sazonal. Este estudo apresenta um novo sistema de visão computacional, chamado Red‑YOLO, projetado para ajudar pequenos robôs móveis a localizar esses delicados cachos de pimenta em pomares reais de forma rápida e precisa, mesmo quando os frutos se sobrepõem ou estão ocultos por folhas.
Por que colher pimenta é tão complicado
Diferentemente de frutos grandes e lisos, como maçãs, os grãos de pimenta vermelha crescem como muitas bagas minúsculas agrupadas em galhos espinhosos. Os cachos podem parecer muito diferentes de uma árvore para outra: alguns são compactos e bem unidos, outros são frouxos e dispersos, e todos ficam rodeados por fundos confusos de galhos, folhas e luz variável. Para um robô, ver onde um cacho termina e outro começa — e quão firmemente cada um está agrupado — é essencial. A força de apreensão e até o tamanho da ferramenta de colheita do robô precisam mudar dependendo do aperto dos frutos, caso contrário os frágeis sacos de óleo das pimentas podem romper, reduzindo qualidade e valor.
Construindo uma biblioteca de imagens do mundo real
Como não existiam coleções públicas de imagens para essa cultura, os pesquisadores primeiro precisaram criar seu próprio conjunto de dados. Ao longo de duas safras no condado de Hanyuan, em Sichuan, fotografaram as pimenteiras em pomares reais usando um smartphone de consumo, capturando 960 imagens quadradas em alta resolução sob diferentes ângulos de sol e horários do dia. Cada imagem foi cuidadosamente rotulada à mão, distinguindo entre cachos compactos e difusos. Para ensinar o computador a lidar com variedade, alteraram digitalmente muitas das imagens — ajustando brilho e contraste, espelhando horizontalmente, distorcendo algumas grades e rotacionando vistas. Isso expandiu o conjunto de treinamento para mais de 4.300 imagens, enquanto um pequeno conjunto de fotos intocadas foi reservado para testar de forma honesta o desempenho final do sistema.
Um modelo de visão computacional mais enxuto e mais preciso
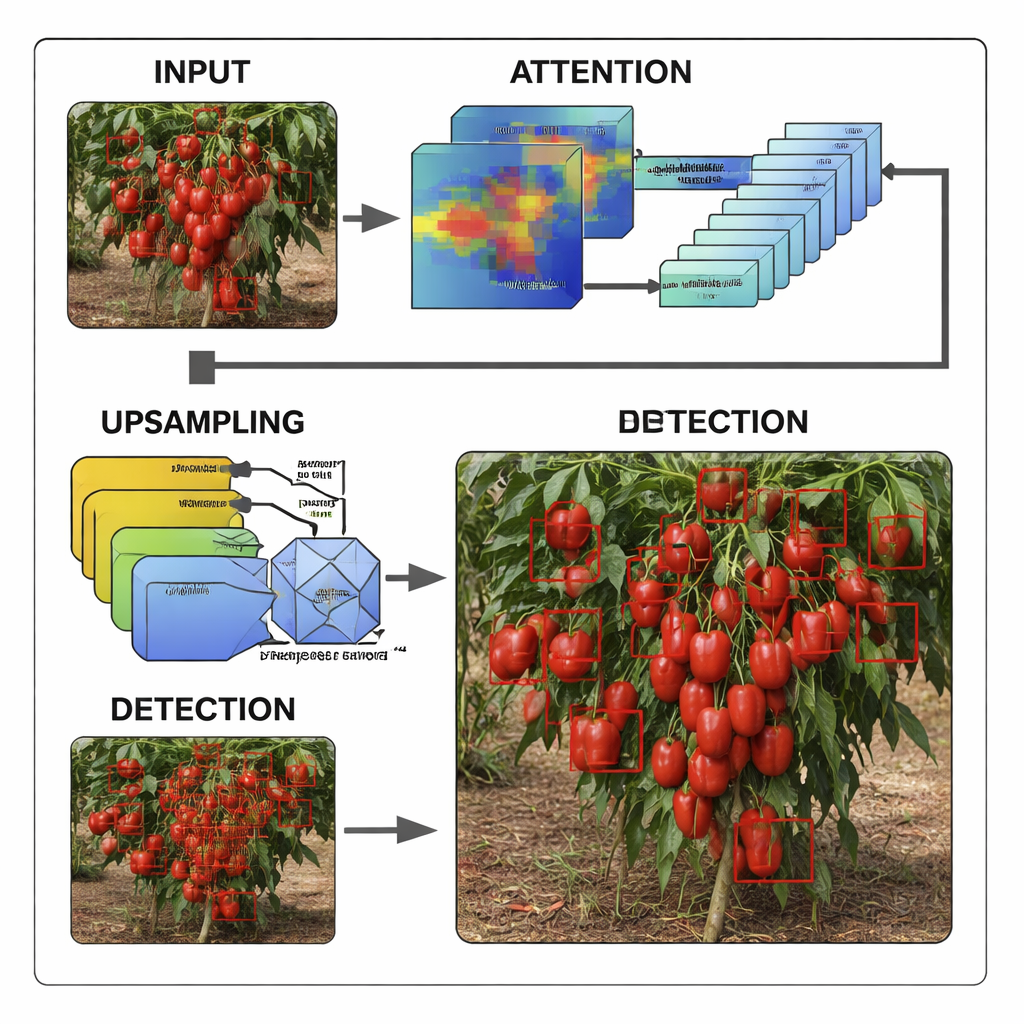
No coração do sistema está o YOLOv8, um modelo de detecção de objetos “you only look once” amplamente usado que encontra objetos em uma única passagem rápida em vez de vários estágios lentos. A equipe adaptou uma versão muito pequena desse modelo e a redesenhou especificamente para cachos de pimenta‑vermelha. Eles adicionaram um módulo de atenção que ensina a rede a focar em canais e regiões mais propensos a conter frutos, ao mesmo tempo em que ignora distrações como céu, galhos e árvores ao fundo. Reprojetaram partes da rede para que ela possa reutilizar informações de forma mais eficiente e cortar cálculos desnecessários. Também substituíram uma etapa simples de redimensionamento por um bloco de upsampling mais inteligente que reconstrói detalhes finos e contornos ao redor de pimentas sobrepostas, ajudando o modelo a distinguir onde cachos densos começam e terminam.
Visão rápida e precisa para robôs pequenos
Para avaliar se essas mudanças compensavam, os pesquisadores compararam o Red‑YOLO com sistemas de detecção mais antigos e pesados e com uma gama de variantes modernas leves do YOLO. Modelos tradicionais em múltiplos estágios, embora poderosos, eram simplesmente lentos e exigentes demais para robôs compactos de pomar. Várias versões mais recentes do YOLO se saíram melhor, mas tiveram dificuldades com cachos pequenos, parcialmente ocultos ou em fundos movimentados, frequentemente perdendo frutos ou confundindo folhas com pimentas. O Red‑YOLO atingiu um equilíbrio melhor: detectou cachos de pimenta com maior precisão e recall geral do que todos os modelos de comparação, mantendo o tamanho do modelo abaixo de três milhões de parâmetros e a carga computacional baixa o suficiente para processadores embarcados. Testes em cenas variadas de pomar mostraram que o Red‑YOLO encontrou consistentemente cachos mesmo quando os frutos eram minúsculos, sombreados ou fortemente sobrepostos.
Do modelo de laboratório ao ajudante do pomar
Para não especialistas, o resultado principal é prático: este trabalho mostra que um sistema de visão compacto e cuidadosamente ajustado pode dar a pequenos robôs de colheita um “olho” confiável no campo. Com o Red‑YOLO, um robô pode selecionar automaticamente se está lidando com um cacho compacto ou difuso e ajustar o tamanho e a força de sua garra antes da colheita, reduzindo danos e economizando mão de obra. Embora o estudo atual foque em uma variedade de pimenta em uma região específica, a mesma abordagem — construir conjuntos de dados focados e refinar modelos de detecção enxutos — poderia ser estendida a outras culturas especiais. À medida que esses sistemas de visão se tornarem mais robustos e amplamente implantados, poderão ajudar a tornar a colheita mais rápida, segura e consistente, garantindo um fornecimento estável das pimentas que alimentam alguns dos sabores favoritos do mundo.
Citação: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Palavras-chave: colheita robótica, detecção de pimenta, visão computacional, YOLO leve, agricultura inteligente