Clear Sky Science · pt
Desenvolvimento de robô inteligente de cuidado ao paciente com navegação autônoma aprimorada por otimização de rotas em enfermarias hospitalares
Robôs Que Ajudam Enfermeiros, Não Os Substituem
Hospitais em todo o mundo estão sob pressão: mais pacientes idosos, mais doenças crônicas e equipes de trabalho no limite. Este estudo descreve um robô inteligente de cuidado ao paciente projetado não para assumir a enfermagem, mas para lidar discretamente com monitoramentos repetitivos e rondas noturnas nas enfermarias. Ao se deslocar de forma segura e confiável por conta própria, esse robô pode ajudar enfermeiros a detectar emergências mais cedo — como quedas ou febres súbitas — ao mesmo tempo em que reduz sua carga de trabalho e diminui o risco de acidentes em corredores lotados e batentes estreitos.
Por Que Corredores Hospitalares São Difíceis para Robôs
À primeira vista, um corredor hospitalar parece simples: linhas retas, pisos limpos, portas regulares. Para um robô, é bem diferente. Camas, macas, paredes e, especialmente, batentes estreitos criam espaços apertados onde até um pequeno erro pode causar uma colisão. Muitos robôs hospitalares existentes dependem de um conjunto de sensores e hardware complexo para lidar com isso. A equipe por trás deste estudo seguiu outro caminho: propôs um robô que se desloca com segurança usando apenas um sensor principal — um scanner a laser bidimensional que mede distâncias ao seu redor — e uma forma mais inteligente de planejar rotas.

Construindo Um Par de Olhos Extra para o Enfemeiro
Os pesquisadores desenvolveram um robô inteligente de cuidado ao paciente (SPCR) sobre uma base comercial com rodas. No seu corpo, montaram uma câmera 3D para detectar quedas e ler sinais vitais sem tocar no paciente, e um sensor a laser 2D no topo para escanear continuamente o entorno em círculo completo. No interior do robô há um computador embarcado, baterias, controladores de motor e eletrônica de comunicação que permitem conectar a um aplicativo de controle e tomar decisões de locomoção de forma autônoma. O robô pode se mover em todas as direções, articular um braço de câmera para olhar os pacientes e foi projetado para operar por várias horas em condições reais de hospital.
Um Mapa Mais Inteligente em Vez de Mais Hardware
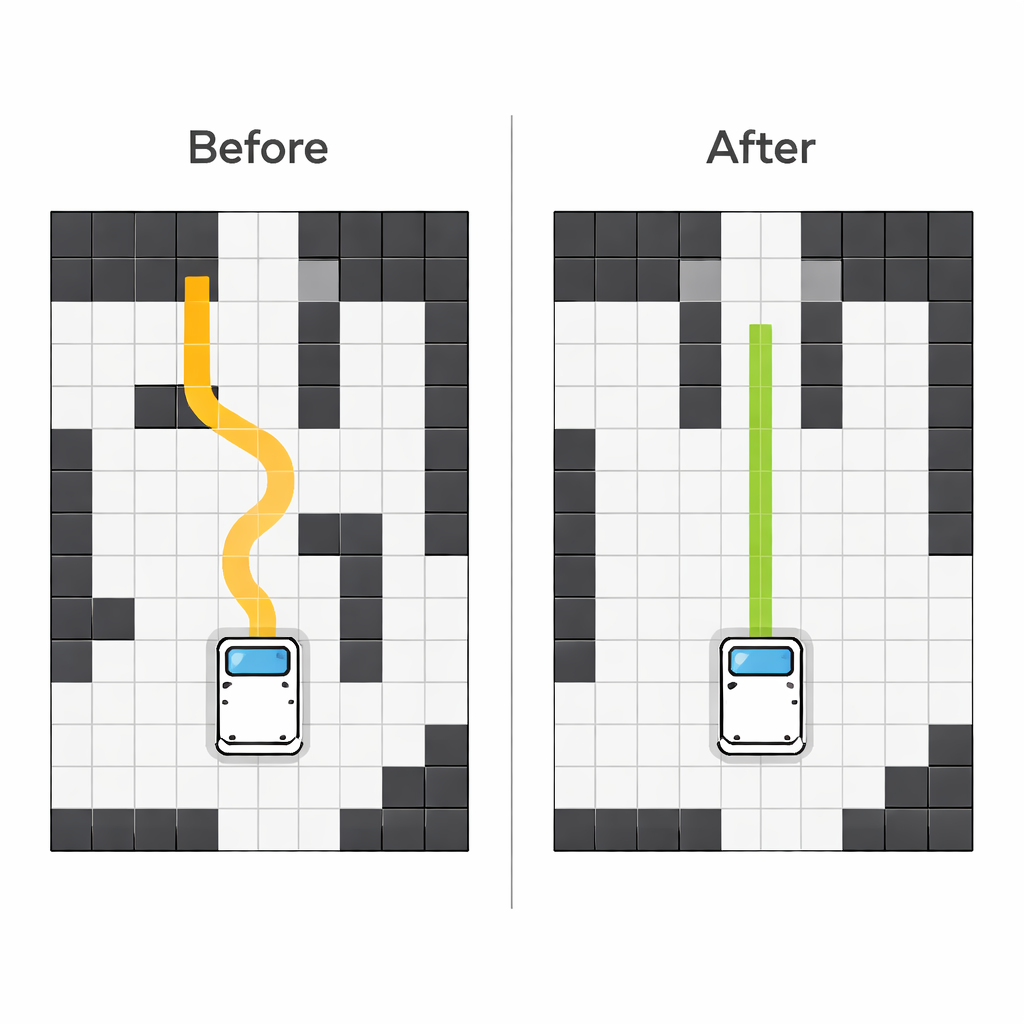
Para navegar, o robô primeiro precisa de um mapa que indique onde pode e onde não pode ir. A equipe partiu de plantas precisas de um corredor hospitalar e as converteu em um mapa em grade, onde cada pequena célula é rotulada como espaço livre, parede ou obstáculo. Em vez de deixar o mapa como estava, eles o reformularam para ser mais cauteloso do que a realidade. Introduziram “espaços de obstáculos virtuais” — áreas bloqueadas extras que afastam o robô de pontos de risco, como bordas de portas e cantos apertados. O software de planejamento de rotas, baseado em uma versão aprimorada do algoritmo D* Lite, então busca nesse mapa mais seguro rotas que evitem curvas muito acentuadas e mantenham o robô mais próximo do centro de passagens estreitas.
Testando o Robô em Enfermarias Reais
O sistema foi testado em um corredor hospitalar real dividido em três trechos com diferentes combinações de corredores, portas e obstáculos. O robô teve de viajar entre pontos de checagem, passar por portas padrão de 90 centímetros de largura e evitar paredes e objetos fixos. Como o próprio robô tem cerca de 76 centímetros de largura, ele tinha apenas alguns centímetros de folga em cada lado ao passar pelas portas — condições nas quais muitos robôs têm dificuldade. Ao comparar o desempenho antes e depois do ajuste do mapa em grade, os pesquisadores verificaram que a taxa de sucesso do robô em completar suas rotas sem tocar em nada aumentou em mais de 30% em todos os trechos, com trajetórias mais suaves e menos manobras desnecessárias.
O Que Isso Significa para o Cuidado ao Paciente no Futuro
Para não-especialistas, a mensagem principal é simples: em vez de equipar robôs com cada vez mais sensores, este estudo mostra que o desenho cuidadoso de mapas digitais e um planejamento de rotas mais inteligente podem tornar robôs hospitalares mais seguros e mais práticos. Um robô que consiga passar confiavelmente por portas estreitas à noite, seguir trajetos eficientes e verificar discretamente sinais básicos dos pacientes poderia liberar os enfermeiros para se concentrarem no cuidado humano — confortando famílias, tomando decisões complexas e lidando com emergências. Os autores veem este trabalho como uma base: versões futuras acrescentarão mais sensores e recursos de monitoramento de pacientes mais ricos, com o objetivo de assistentes robóticos confiáveis em funcionamento 24 horas que se movam com segurança em ambientes hospitalares reais.
Citação: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Palavras-chave: robôs hospitalares, navegação autônoma, monitoramento de pacientes, mapeamento LiDAR, planejamento de rotas