Clear Sky Science · pt
Rede de fusão de informações de borda entre estágios para detecção de pequenos objetos em imagens aéreas
Por que identificar minúcias do alto importa
De monitoramento de tráfego e resposta a desastres ao manejo de culturas, grande parte do nosso mundo é observada do alto por drones. No entanto, muitas das coisas que mais nos interessam nessas imagens aéreas — pessoas, carros ou animais — aparecem com apenas alguns pixels de largura. Este artigo apresenta um novo sistema de visão computacional, CEIFNet, projetado especificamente para encontrar esses objetos minúsculos de forma mais precisa e rápida, mesmo quando estão em meio a ruas urbanas confusas, campos ou ruído noturno.
Ver coisas pequenas em uma grande cena
Sistemas padrão de detecção de objetos foram desenvolvidos principalmente para fotos ao nível do solo, onde um carro ou uma pessoa geralmente preenche uma parte perceptível do quadro. Em imagens de drone, porém, a câmera pode estar a centenas de metros, de modo que cada alvo é minúsculo e facilmente borrado ou perdido quando a imagem é reduzida dentro de uma rede neural. Os autores explicam que detectores de uma etapa populares, como a família YOLO, funcionam bem em cenas cotidianas, mas têm dificuldades quando os objetos são ao mesmo tempo muito pequenos e altamente variados em tamanho. A amostragem regressiva repetida, destinada a compreender a cena como um todo, tende a apagar os sinais tênues desses alvos pequenos.
Misturando visão de perto com contexto de grande escala
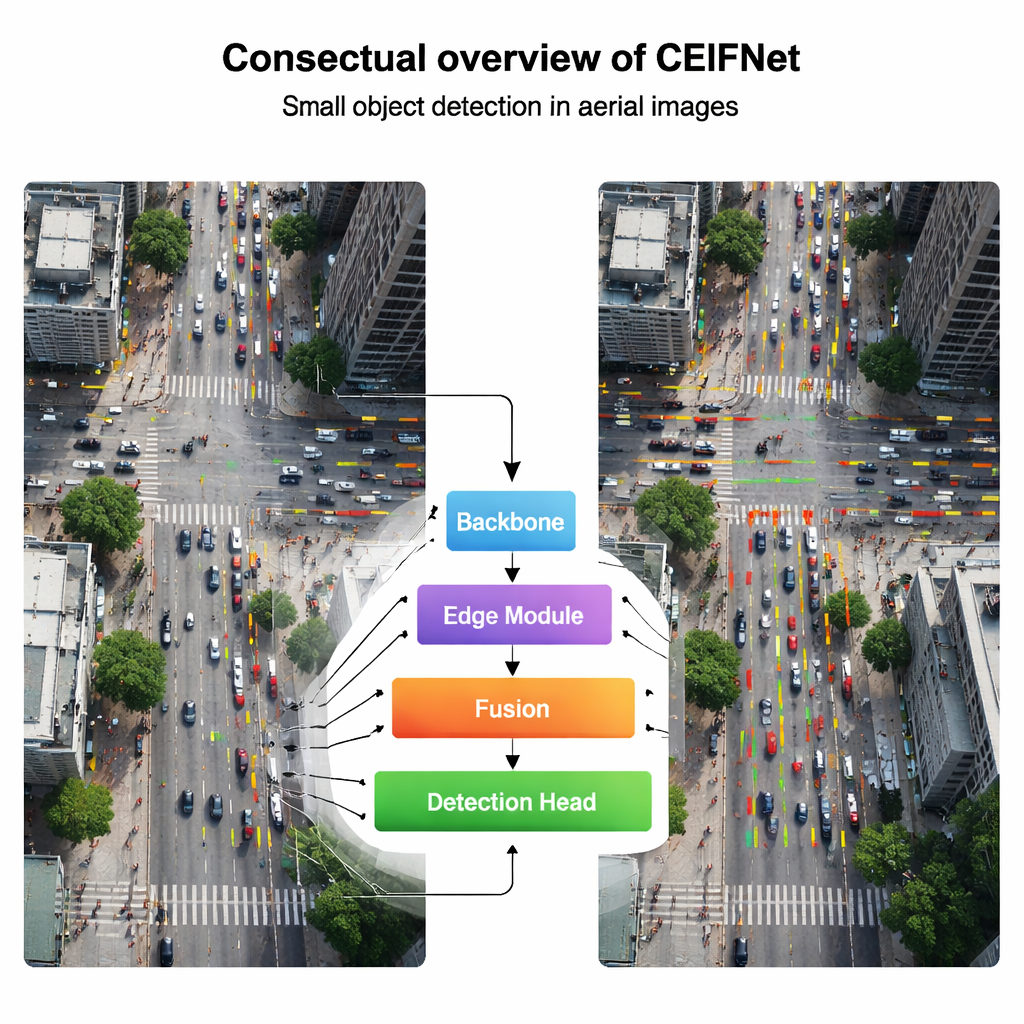
Para enfrentar isso, o CEIFNet combina duas maneiras complementares de enxergar. Um caminho usa filtros convolucionais clássicos, bons em capturar padrões locais nítidos como cantos e texturas. O outro caminho usa um mecanismo de atenção ao estilo Transformer, que se destaca ao relacionar partes distantes da imagem e entender a cena globalmente. No bloco central, chamado bloco transformador cross-stage, as características de imagem de entrada são divididas: a maior parte dos canais passa por um caminho convolucional leve, enquanto uma porção menor segue por um caminho de atenção que raciocina sobre relações de longo alcance. Essas saídas são então recombinadas, fornecendo à rede detalhes finos e consciência global sem explodir o custo computacional.
Usando bordas como mapa para alvos minúsculos
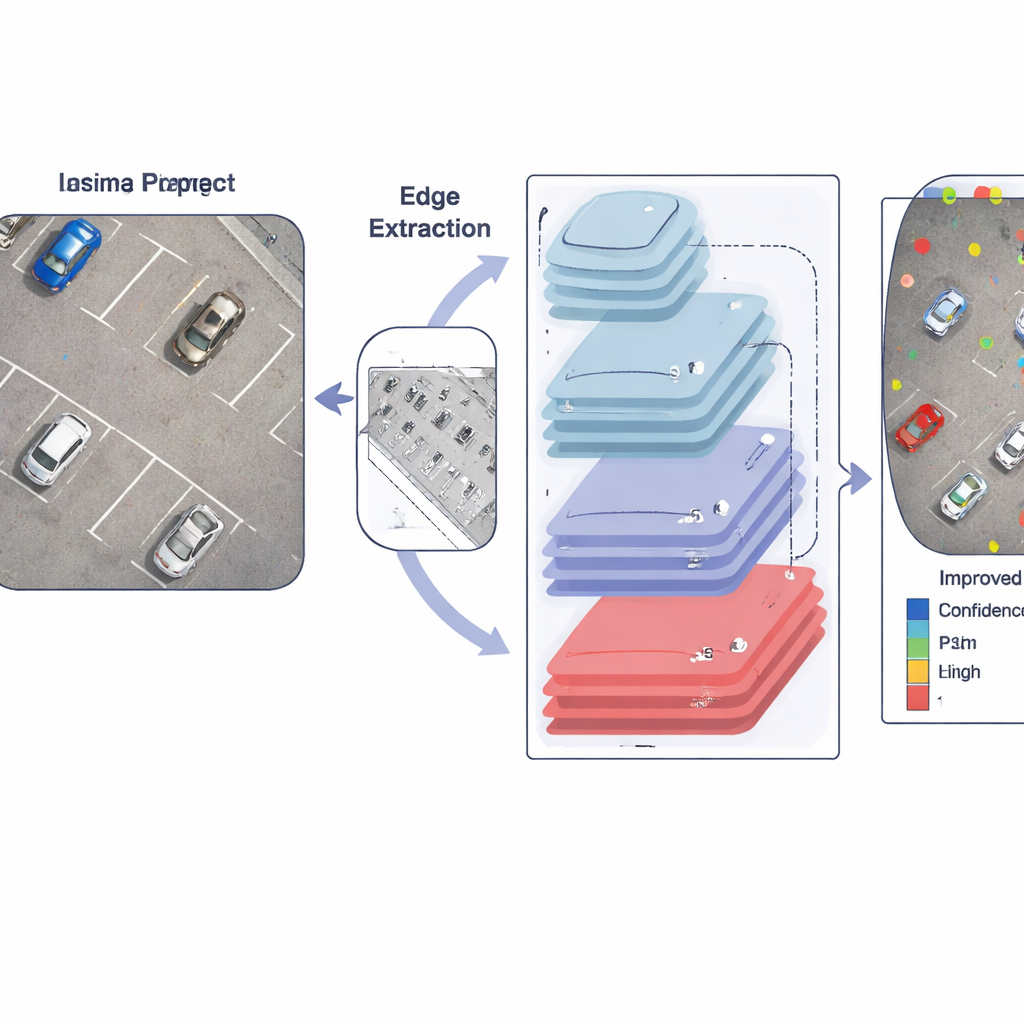
Um insight-chave do artigo é que limites de objetos — bordas — são especialmente valiosos quando os alvos têm apenas alguns pixels. Em vez de depender somente de filtros aprendidos, os autores injetam deliberadamente informação de borda na rede. Um módulo dedicado aplica primeiro um operador de Sobel, um detector de bordas simples e robusto, para destacar onde a luminosidade muda acentuadamente, como ao redor dos contornos de carros ou pessoas. Esses mapas de borda são então agrupados em vários tamanhos para corresponder a diferentes escalas de características e fundidos por meio de um módulo cross-channel. À medida que a imagem avança na rede, esses indícios de borda realçados são alimentados repetidamente nas camadas posteriores, ajudando o modelo a manter rastreamento de onde pequenos objetos começam e terminam, apesar do borramento e da redução habituais.
Adaptando-se a tamanho, posição e complexidade da cena
Na saída, o CEIFNet usa uma cabeça de detecção dinâmica que pode ajustar seu comportamento conforme o que observa. Em vez de usar filtros fixos, essa etapa final aplica três formas de atenção ao mesmo tempo: pode preferir certos tamanhos de objeto, focar nas localizações mais promissoras da imagem e enfatizar os canais de característica mais informativos. Junto com uma estrutura de pirâmide de características que preserva uma camada extra de alta resolução, isso torna o sistema mais responsivo a alvos minúsculos e densamente agrupados em filmagens reais de drones, de cruzamentos lotados a estacionamentos cheios e cenas térmicas no infravermelho à noite.
Comprovando os avanços em cenários reais de drone
Os pesquisadores testaram o CEIFNet em dois conjuntos de dados exigentes de drones: VisDrone2019, composto por cenas urbanas e suburbanas em luz do dia, e HIT-UAV, uma coleção térmica em infravermelho onde muitos alvos são tênues e pequenos. Em ambos, o novo sistema detectou objetos com mais precisão do que uma forte linha de base baseada em YOLO e uma série de outros detectores modernos, mantendo velocidade suficiente para uso em tempo real em uma placa gráfica potente. Experimentos de ablação cuidadosos mostraram que cada componente — o bloco híbrido, o módulo de borda, a camada extra de alta resolução e a cabeça dinâmica — contribuiu para o ganho geral.
O que isso significa para a tecnologia do dia a dia
Para não-especialistas, a conclusão é que o CEIFNet oferece uma forma mais inteligente para drones “notarem as pequenas coisas” em cenas grandes e complexas. Ao preservar informação de borda, misturar detalhe local com contexto global e adaptar sua atenção dinamicamente, a rede pode detectar pequenos objetos que outros sistemas perdem ou posicionam incorretamente. Isso torna o monitoramento aéreo mais confiável para tarefas como segurança de tráfego, busca e resgate e agricultura de precisão, e aponta para sistemas futuros capazes de extrair informações confiáveis de vistas cada vez mais altas e amplas do nosso mundo.
Citação: Xiao, J., Li, C., Chen, H. et al. Cross-stage edge information fusion network for small object detection in aerial images. Sci Rep 16, 7639 (2026). https://doi.org/10.1038/s41598-026-36251-5
Palavras-chave: detecção de objetos aéreos, pequenos objetos, imagens por drone, visão baseada em bordas, aprendizado profundo