Clear Sky Science · pt
Controle preditivo baseado em aprendizado por reforço para otimização de motor síncrono de ímã permanente contra-rotante em sistema de propulsão de submarino
Motores mais inteligentes para submarinos mais furtivos
Submarinos modernos dependem de propulsão silenciosa e eficiente para explorar os oceanos e cumprir missões científicas, comerciais ou de defesa. Este estudo analisa um tipo especial de motor elétrico que gira duas hélices em direções opostas, ajudando o submarino a se mover de forma suave e silenciosa pela água. Os pesquisadores mostram como a combinação de ferramentas avançadas de previsão com um algoritmo de aprendizado pode manter esses motores estáveis e eficientes, mesmo quando ondas, correntes e manobras bruscas os perturbam.
Duas hélices, um submarino estável
Sistemas tradicionais de hélice única podem fazer o submarino girar e rolar, especialmente em altas velocidades, tornando a dirigibilidade mais difícil e aumentando a detectabilidade. Para evitar isso, os engenheiros usam sistemas de hélices contra-rotantes: duas hélices montadas no mesmo eixo, mas girando em direções opostas. No centro dessa configuração está o motor síncrono de ímã permanente contra-rotante (CRPMSM), que é essencialmente dois motores elétricos compactos de alto torque empilhados. Esse arranjo cancela forças de torção indesejadas, melhora o uso de energia e reduz o ruído, todos fatores vitais para furtividade e missões longas sob as ondas. Contudo, quando a carga entre os dois rotores fica desequilibrada, como em águas turbulentas ou curvas acentuadas, manter ambos os lados rodando em perfeita harmonia torna-se um desafio de controle sério. 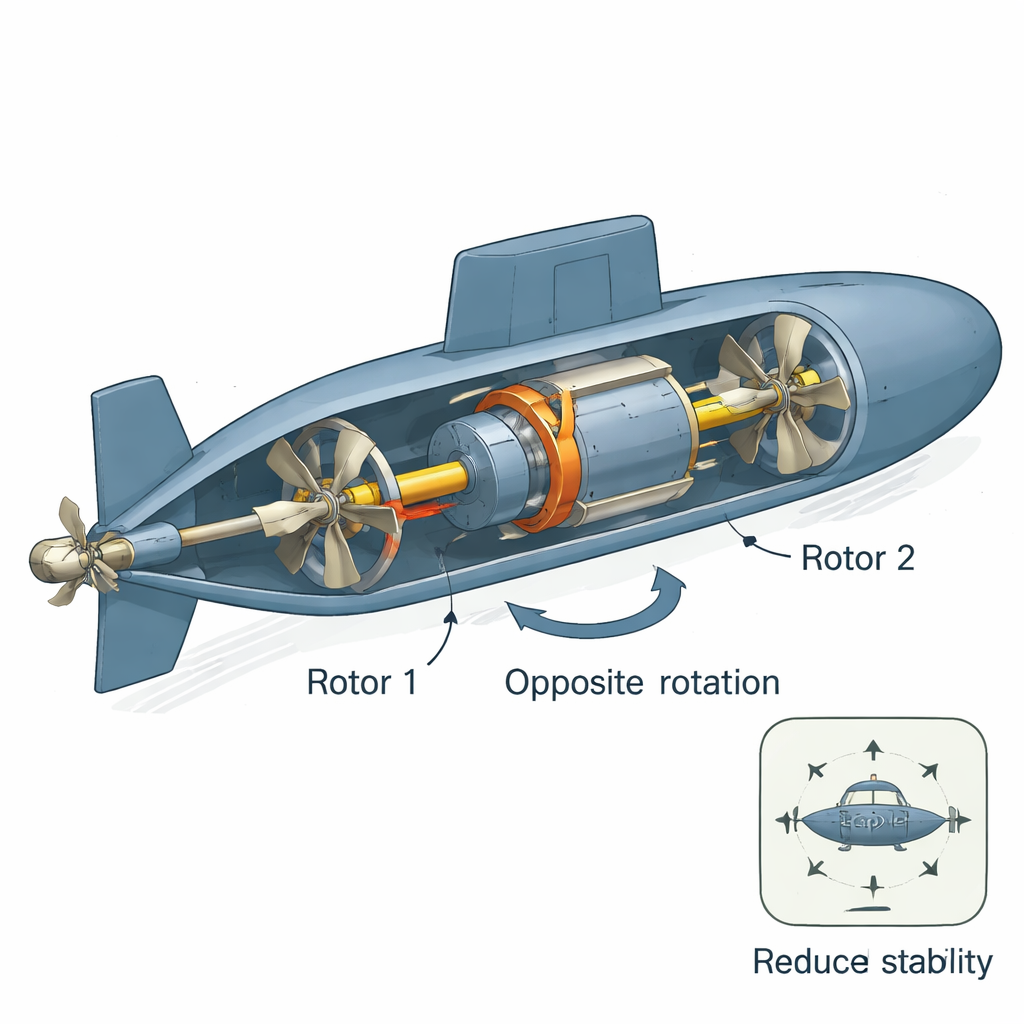
Por que o controle convencional é insuficiente
Engenheiros tentaram muitas estratégias de controle para manter os rotores do CRPMSM sincronizados e eficientes. Métodos como controle orientado por campo e controle direto de torque podem funcionar bem em condições calmas e previsíveis, mas têm dificuldades quando o ambiente subaquático muda rapidamente ou se torna altamente desigual. Técnicas mais sofisticadas, como controle em modo deslizante, fuzzy e adaptativo, melhoram a robustez, porém frequentemente dependem de modelos matemáticos muito precisos do motor e da água ao redor. Na prática, esses modelos nunca são perfeitos, e as discrepâncias podem causar aumento de ondulação de torque, recuperação mais lenta após perturbações e desperdício de energia. O Controle Preditivo por Modelo (MPC), que planeja movimentos de controle ótimos para um curto horizonte futuro, oferece resposta rápida, mas ainda está fortemente ligado à qualidade do modelo subjacente.
Um controlador híbrido que aprende em serviço
Os autores propõem uma estrutura híbrida de Controle Preditivo por Modelo guiado por Aprendizado por Reforço (RL-MPC) que combina as forças de ambas as abordagens. O MPC usa um modelo matemático do CRPMSM para prever como correntes, torque e velocidade evoluirão nos próximos passos de controle e escolhe comandos de tensão que devem seguir as metas desejadas de velocidade e corrente, respeitando limites. Sobre isso, um agente de aprendizado por reforço baseado no algoritmo Twin Delayed Deep Deterministic Policy Gradient (TD3) observa como o motor real se comporta. Ao receber recompensas quando os erros de velocidade, erros de corrente e o esforço de controle são pequenos, o agente de aprendizado ajusta gradualmente as saídas do MPC para compensar erros de modelagem, cargas desequilibradas e perturbações externas. Uma etapa de modulação por largura de pulso vetorial (space-vector PWM) então converte esses comandos de tensão otimizados em sinais de chaveamento para o inversor que alimenta o motor.
Testando o motor inteligente
Para avaliar a abordagem, os pesquisadores construíram uma simulação detalhada de um sistema de motor contra-rotante de 120 kW no MATLAB/Simulink e o testaram em três cenários operacionais realistas. No primeiro, o motor rodou em velocidade constante enquanto a carga em ambos os rotores variou, mas permaneceu balanceada; no segundo, a velocidade foi variada sob carga constante; no terceiro, o caso mais exigente, os rotores experimentaram cargas diferentes enquanto o ponto de ajuste de velocidade era fixo. Em todos os casos, o RL-MPC foi comparado diretamente com MPC convencional usando os mesmos horizontes de predição e controle. 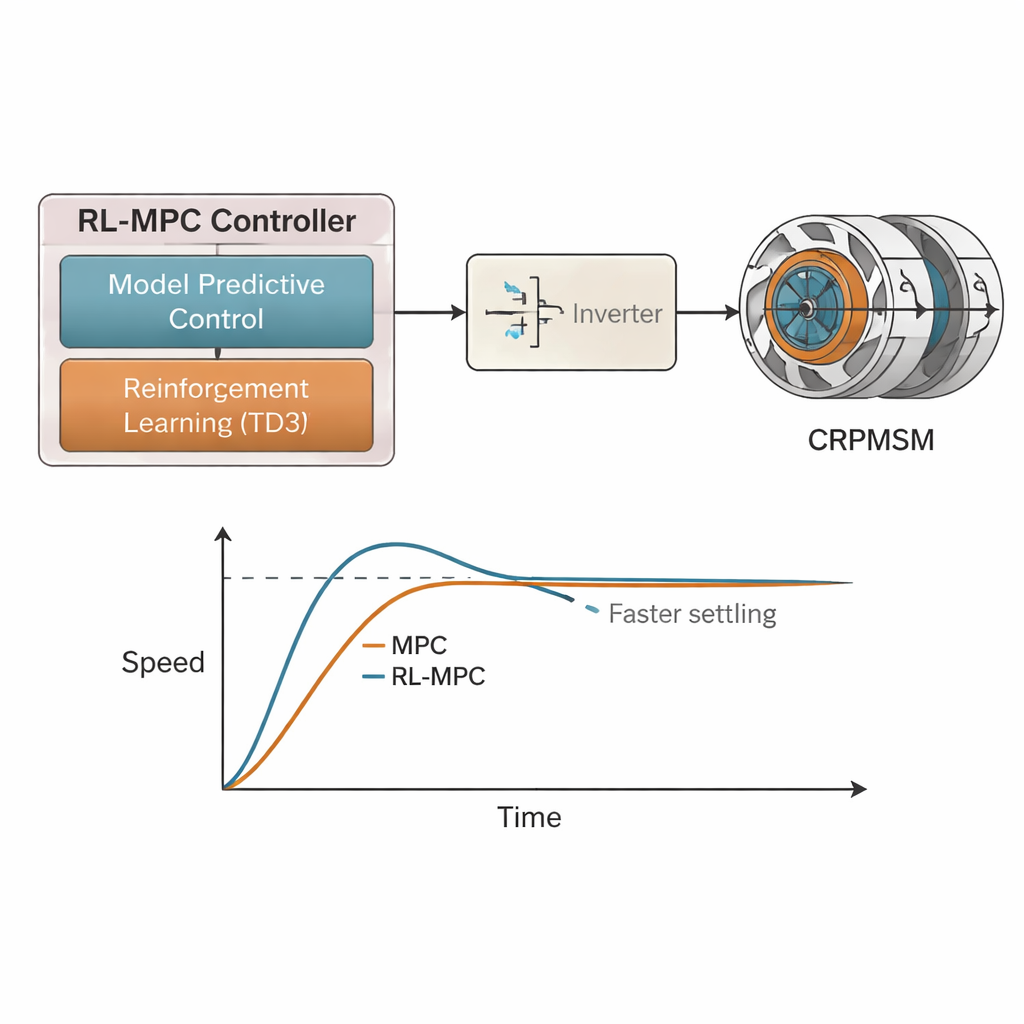
Resposta mais rápida, correntes mais limpas, melhor sincronização
O controlador híbrido RL-MPC superou consistentemente o MPC padrão em todos os testes. Quando cargas ou velocidades mudaram repentinamente, o RL-MPC reduziu o overshoot de velocidade de cerca de 30% para aproximadamente 15–16,6% e reduziu pela metade o tempo de estabelecimento de cerca de 1,4 segundos para 0,7 segundos. As ondulações de torque foram menores, e os dois rotores contra-rotantes permaneceram estreitamente sincronizados, mesmo quando um rotor estava carregado mais pesadamente que o outro. Igualmente importante, a qualidade das correntes do estator melhorou substancialmente: a distorção harmônica total caiu mais de 60% durante transitórios severos de carga desequilibrada, caindo de 9,3% para MPC para 3,4% para RL-MPC, e chegando a cerca de 2–3% em regime permanente. Correntes mais limpas significam menos aquecimento, operação mais silenciosa e maior eficiência geral.
O que isso significa para veículos subaquáticos do futuro
Para um público não especialista, a mensagem central é que adicionar uma camada de aprendizado sobre um controlador preditivo torna os motores de submarino mais inteligentes e resilientes. Em vez de depender apenas de equações fixas que podem falhar quando o mar fica agitado ou o veículo realiza manobras bruscas, a estrutura RL-MPC pode se adaptar em tempo real, mantendo o motor de rotor duplo sincronizado, responsivo e eficiente. Embora os resultados agora sejam baseados em simulação e precisem ser validados em hardware real e em oceanos reais, este trabalho aponta para veículos subaquáticos futuros que viajam mais longe com a mesma energia, fazem menos barulho e permanecem estáveis e controláveis em condições desafiadoras.
Citação: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Palavras-chave: propulsão de submarino, motor contra-rotante, controle por aprendizado por reforço, controle preditivo por modelo, veículos subaquáticos