Clear Sky Science · pt
Um algoritmo conjunto de estimativa de alcance–ângulo–velocidade para radar FDA-MIMO baseado em processamento de sinal em grafos
Radar mais inteligente para um mundo lotado e ruidoso
De carros autônomos a vigilância aérea, a sociedade moderna depende fortemente de sistemas de radar capazes de localizar e rastrear objetos de forma rápida e confiável. À medida que céus, estradas e ondas de rádio se tornam mais congestionados, o radar precisa distinguir múltiplos alvos em movimento na presença de forte interferência e ruído. Este artigo apresenta uma nova maneira de fazer uma classe poderosa de radares — chamados radares FDA-MIMO — enxergar com mais clareza em três dimensões (distância, direção e velocidade) ao aproveitar ferramentas de um campo emergente conhecido como processamento de sinal em grafos.
Por que essa nova arquitetura de radar importa
Radares de matriz em fase tradicionais direcionam seus feixes principalmente por ângulo, como mover uma lanterna para a esquerda e para a direita. Radares do tipo Frequency Diverse Array (FDA) funcionam de forma diferente: cada elemento de antena transmite em uma frequência ligeiramente distinta. Essa pequena diferença faz com que o padrão de feixe dependa não apenas do ângulo, mas também da distância e do tempo. Quando combinado com técnicas múltiplas de entrada e múltiplas saídas (MIMO), o radar FDA-MIMO pode, em princípio, localizar um alvo em três dimensões: quão distante ele está, onde ele fica em ângulo e quão rápido ele se move. O desafio é extrair todas essas informações de maneira rápida e precisa a partir dos ecos brutos, especialmente quando há muitos alvos e os sinais estão soterrados pelo ruído.
Transformando ecos de radar em um problema de rede
Os autores enfrentam esse desafio reimaginando as medidas do radar como sinais que vivem em um grafo — uma rede de nós e ligações. Cada nó desse grafo representa um par específico de transmissão–recepção de antena na matriz FDA-MIMO, e as ligações capturam como os sinais em nós vizinhos se relacionam no espaço. Ao definir cuidadosamente essas conexões, eles constroem uma "matriz de adjacência" que descreve como os ecos devem se propagar pela matriz se um alvo estiver em uma dada distância e ângulo. Quando o par distância–ângulo assumido coincide com o alvo real, o padrão de eco medido alinha-se quase perfeitamente com um dos modos naturais de vibração do grafo. Na prática, isso significa que, após uma versão baseada em grafos da transformada de Fourier, a energia se concentra em um pico muito nítido em um único componente espectral. O algoritmo procura por tais picos em uma grade de valores de distância e ângulo para encontrar onde os alvos estão localizados. 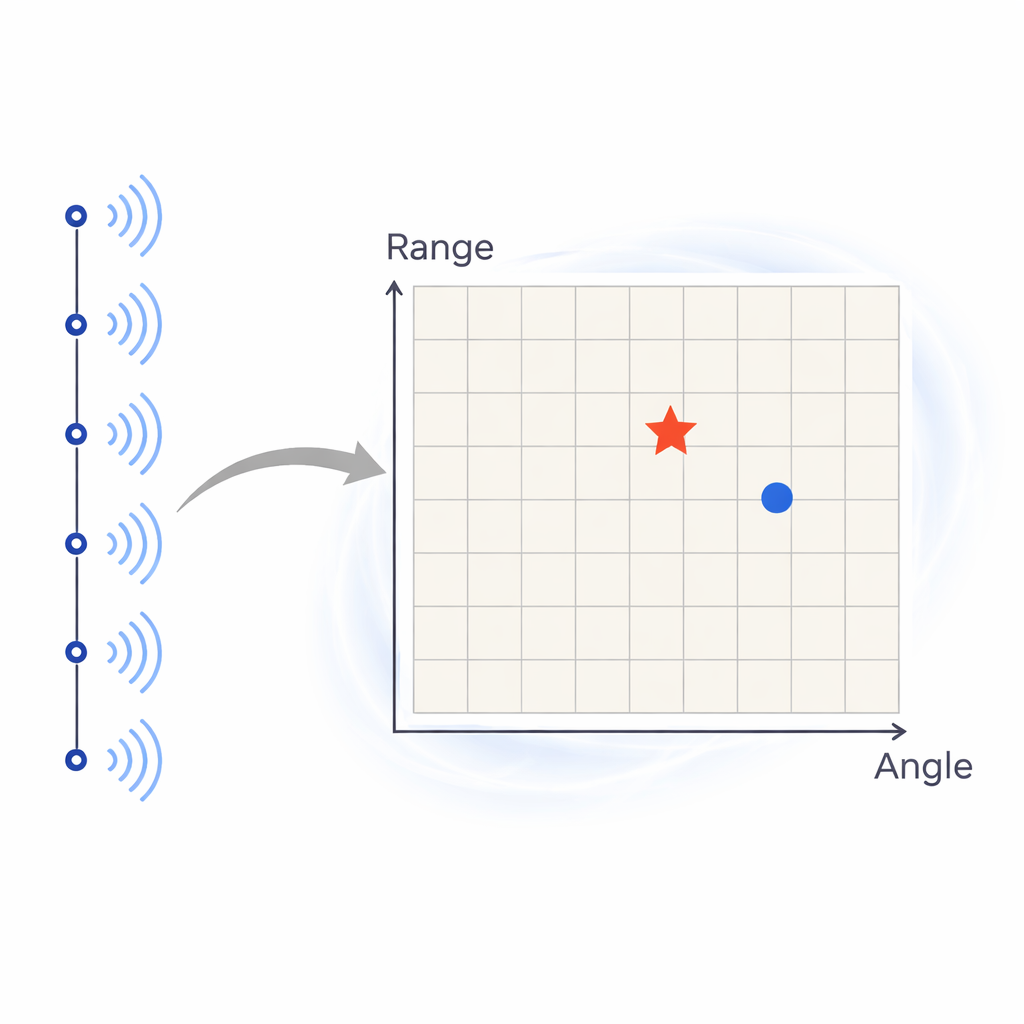
Adicionando movimento: medir velocidade com a mesma ideia
Para estimar quão rápido um alvo está se movendo, o método estende o conceito de grafo para a dimensão temporal, através de múltiplos pulsos de radar. Agora, cada nó representa um pulso no tempo, e as ligações conectam pulsos vizinhos em um laço para capturar como o sinal deve evoluir se o alvo tiver uma certa velocidade radial. Mais uma vez, quando a velocidade assumida coincide com a velocidade verdadeira, o sinal transformado mostra um pico concentrado no domínio espectral do grafo. O algoritmo varre velocidades candidatas, procurando onde esse pico é mais forte. De forma crucial, os autores projetam seu arcabouço para que as estimativas de distância–ângulo do grafo espacial e as estimativas de velocidade do grafo temporal se reforcem mutuamente. Dados de todas as antenas e de todos os pulsos são combinados, formando uma estrutura multidimensional que melhora a precisão sem duplicar o trabalho. 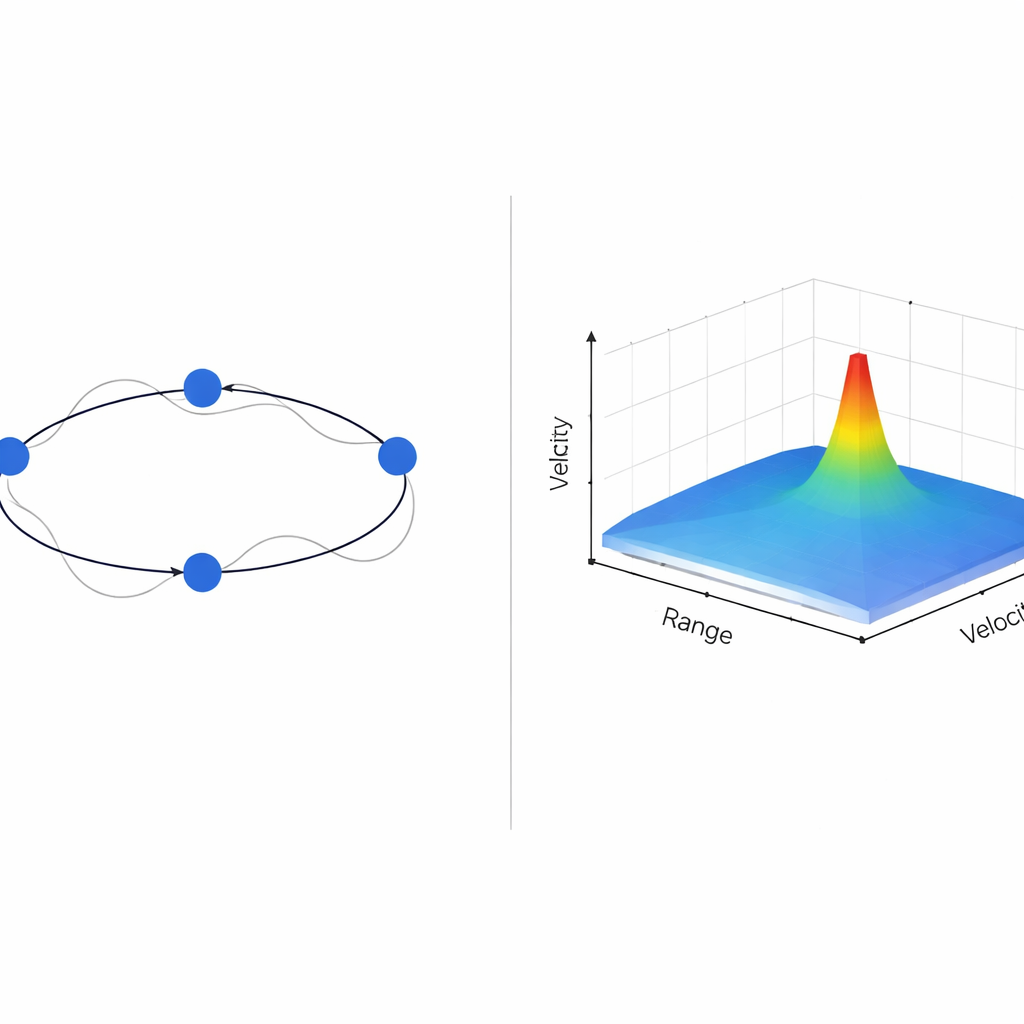
Submetendo o método ao teste
Através de uma série de simulações, os pesquisadores comparam sua abordagem baseada em grafos com uma técnica amplamente usada e de alta precisão conhecida como MUSIC. Eles testam cenários com alvo único e múltiplos alvos, examinam quão bem cada método separa objetos próximos e avaliam o desempenho quando os sinais são muito fracos em relação ao ruído. O algoritmo baseado em grafos alcança um esforço computacional geral semelhante aos métodos clássicos, mas oferece resolução mais nítida em distância, ângulo e velocidade. É especialmente efetivo na supressão de picos falsos causados por ruído, levando a mapas de alvos mais limpos e mais confiáveis. Mesmo quando a relação sinal-ruído é pobre — condições em que muitos métodos tradicionais têm dificuldades — o novo algoritmo mantém limites de erro apertados sobre onde os alvos estão e quão rápido eles se movem.
O que isso significa para o radar no mundo real
Em termos simples, este trabalho mostra como tratar dados de radar como se vivessem em uma rede permite um processamento mais inteligente que pode separar de forma mais limpa alvos reais de clutter. Para aplicações que vão da defesa e controle de tráfego aéreo à segurança automotiva e sensoriamento ambiental, a técnica proposta promete rastreamento mais preciso de múltiplos objetos em movimento em condições difíceis, sem exigir quantidades irreais de computação. Ao mesclar um projeto avançado de antenas com matemática baseada em grafos, os autores demonstram um caminho prático rumo a radares que enxergam mais longe, com mais nitidez e de forma mais confiável em um ambiente eletromagnético cada vez mais complexo.
Citação: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Palavras-chave: sensoriamento por radar, rastreamento de alvos, processamento de sinal, processamento de sinal em grafos, FDA-MIMO