Clear Sky Science · pt
DASA*: algoritmo A* autocapaz e sensível à direção com heurística PPO para planejamento de rotas de UAV em cidades inteligentes
Rotas mais inteligentes para drones urbanos
Imagine frotas de pequenos drones de entrega se esgueirando entre arranha‑céus, levando remédios, encomendas ou suprimentos de emergência por uma cidade movimentada. Para voar com segurança e rapidez, cada drone precisa decidir constantemente qual direção seguir a seguir. Este artigo apresenta uma nova maneira de os drones encontrarem rotas melhores em espaços urbanos tridimensionais congestionados, tornando seus trajetos mais curtos, suaves e confiáveis do que com métodos tradicionais.

Por que encontrar um bom caminho é tão difícil
Para um drone, escolher um caminho é mais do que traçar uma linha reta do ponto A ao ponto B. Ele precisa desviar de prédios, árvores e zonas de exclusão aérea enquanto respeita limites de curva e altitude. Métodos clássicos de planejamento de rota, como o bem conhecido algoritmo A*, funcionam bem em mapas simples, mas enfrentam dificuldades em cenários urbanos 3D realistas. Frequentemente, verificam muitos passos possíveis, desperdiçam poder computacional e podem gerar trajetos em ziguezague mais longos do que o necessário ou até falhar quando o ambiente está muito congestionado. À medida que as cidades inteligentes se tornam mais complexas, essas limitações viram um gargalo sério para um tráfego aéreo seguro e eficiente.
Uma melhoria sensível à direção para uma ferramenta clássica
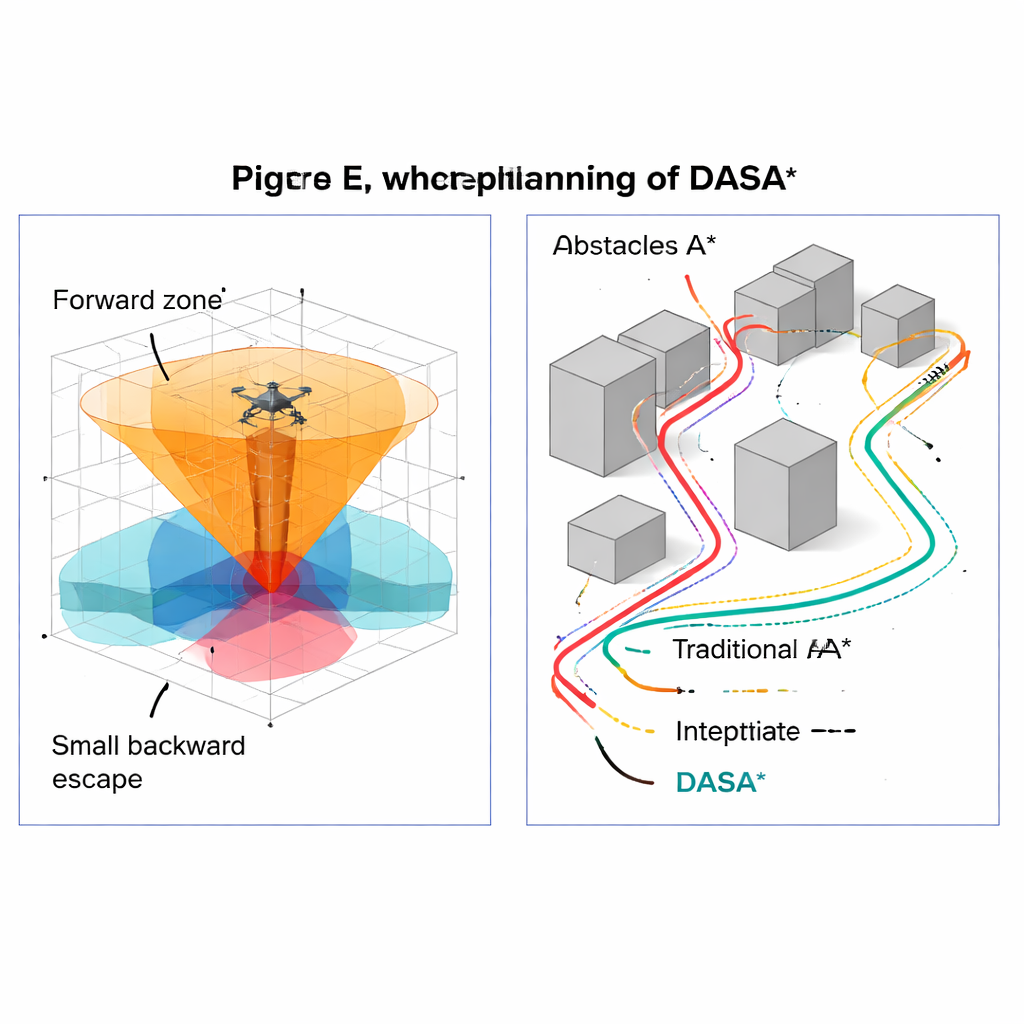
Os autores partem do algoritmo A* e propõem uma versão aprimorada chamada DASA* (Direction‑Aware and Self‑Adaptive A*). Em vez de vasculhar cegamente todas as direções ao redor do drone, o DASA* presta atenção aonde o objetivo está. Ele classifica as posições candidatas próximas em três camadas: aquelas principalmente à frente do drone rumo ao alvo, as laterais e um pequeno conjunto atrás que pode ajudar a escapar de becos sem saída. Um simples detector de estagnação observa sinais de que a busca está “presa” e então alarga automaticamente a busca, de um cone estreito voltado para frente para um vizinhança mais ampla quando necessário. Essa expansão cuidadosa e alinhada ao objetivo reduz explorações desnecessárias ao mesmo tempo em que garante que uma rota válida será encontrada, se existir.
Adaptando‑se a espaços abertos e congestionados
Outra característica chave do DASA* é que ele altera seu passo conforme o entorno. Quando o drone está longe de obstáculos, o algoritmo dá passos maiores, cobrindo rapidamente espaços abertos. Ao se aproximar de prédios ou outros riscos, alterna para passos menores, permitindo manobras precisas em brechas estreitas. Esse “nível de zoom” variável permite que o planejador avance rápido onde é seguro e desacelere apenas onde a precisão importa. Após encontrar um caminho bruto, uma etapa dedicada de ajuste remove waypoints desnecessários e ajusta uma curva suave pelos pontos-chave restantes. O resultado é uma rota que não apenas evita colisões, mas também se assemelha mais a um trajeto natural que um piloto habilidoso escolheria, com menos curvas bruscas.
Ensinando o algoritmo a antecipar
O A* tradicional depende de fórmulas de distância simples para estimar quão longe cada posição está do objetivo. O DASA* substitui esse palpite por um guia aprendido baseado em Proximal Policy Optimization (PPO), uma técnica moderna de aprendizado por reforço. Em um ambiente de treinamento, um agente virtual pratica repetidamente mover‑se rumo a um alvo no espaço 3D enquanto percebe distâncias, diferenças de altitude e informações de direção. Uma rede neural aprende gradualmente quão promissora é cada situação e, após o treinamento, serve como um módulo de “intuição” plug‑in para o DASA*. Essa heurística aprendida direciona a busca de forma mais direta para boas soluções, especialmente em layouts complexos onde a distância em linha reta é enganosa.
Quão bem isso funciona em cidades virtuais
Os pesquisadores testaram o DASA* em múltiplos cenários simulados de cidades 3D preenchidos com prédios em forma de caixa e obstáculos cilíndricos que imitam estruturas urbanas reais. Eles o compararam com o A* clássico e várias alternativas populares, incluindo versões aprimoradas de árvores de exploração rápida, enxames de partículas, evolução diferencial e outra variante do A* chamada Theta*. Em muitos casos de teste, o DASA* consistentemente encontrou caminhos mais curtos, expandiu muito menos pontos candidatos e foi muito mais rápido — frequentemente de 10 a 50 vezes mais rápido que o A* padrão. Também manteve uma taxa de sucesso perfeita ou quase perfeita mesmo em ambientes densos semelhantes a labirintos, enquanto alguns métodos concorrentes falharam com mais frequência ou produziram desvios longos e em loop.
O que isso significa para a vida cotidiana
Em termos simples, o DASA* dá aos robôs voadores um senso de direção e julgamento melhor. Ao focar em direções promissoras, adaptar seu nível de detalhe ao ambiente local, usar uma noção aprendida de quão perto está do sucesso e polir a rota final, ele transforma dados brutos de mapa em trajetos de voo eficientes, suaves e práticos. Se adotada em sistemas reais, essa abordagem poderia ajudar futuras cidades inteligentes a gerenciar entregas por drones, inspeções e respostas de emergência com mais segurança e confiabilidade, mesmo à medida que os céus ficam mais movimentados e os ambientes mais complexos.
Citação: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Palavras-chave: planejamento de rotas de UAV, drones para cidades inteligentes, algoritmo A*, navegação autônoma, planejamento de movimento robótico