Clear Sky Science · pt
Estratégia de controle sensorless de posição de campo em toda a faixa de velocidade para PMSM baseada em observador deslizante super-twisting melhorado e otimização de transição suave
Mantendo motores elétricos inteligentes sem hardware extra
De carros elétricos a atuadores de aeronaves, muitas máquinas modernas dependem de um tipo especial de motor elétrico chamado motor síncrono de ímã permanente (PMSM). Esses motores são eficientes e potentes, mas normalmente exigem sensores delicados para acompanhar a velocidade de rotação e a posição do rotor. Sensores aumentam o custo e podem falhar em ambientes severos. Este estudo explora como operar esses motores de forma suave e precisa em toda a faixa de velocidades sem usar nenhum sensor mecânico.
Por que eliminar sensores é tão difícil
Em um acionamento típico de PMSM, pequenos sensores de posição são montados no eixo do motor para informar ao sistema de controle exatamente onde está o rotor. Essa informação é crucial para aplicar corrente nas bobinas no momento certo, como um empurrão cronometrado em um carrossel giratório. No entanto, sensores podem ser frágeis, volumosos e caros. Engenheiros têm tentado há muito tempo substituí‑los por métodos “sensorless” que inferem a posição do rotor a partir dos sinais elétricos do próprio motor. O problema é que nenhum método único funciona bem em todas as velocidades. Em baixa velocidade os indícios elétricos usuais são fracos, enquanto em alta velocidade truques simples ficam ruidosos e imprecisos. Fazer essa ponte sem solavancos, vibração ou perda de controle é um desafio persistente.
Duas maneiras inteligentes de “ouvir” o motor
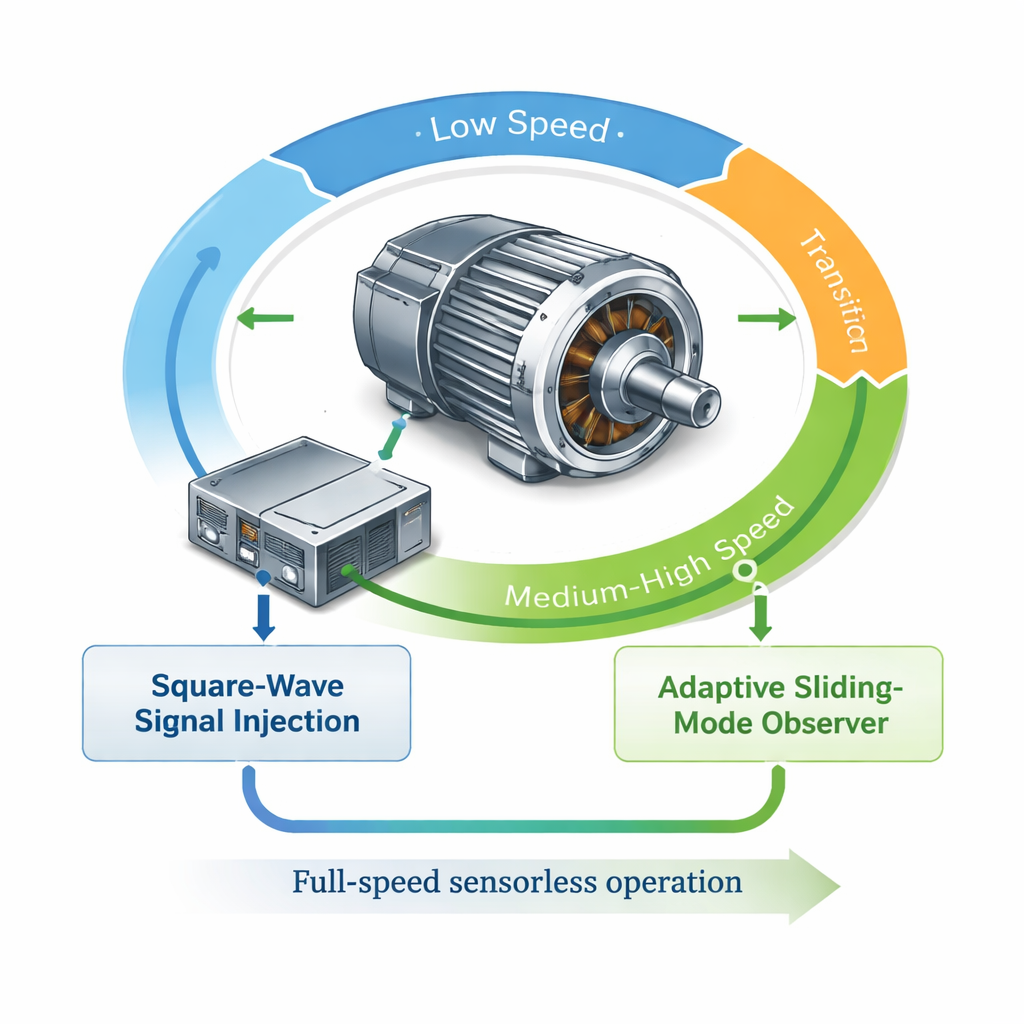
Para cobrir toda a faixa de velocidades, os autores combinam duas técnicas sensorless complementares. Em baixas velocidades, onde o retorno elétrico natural do motor é muito pequeno para ser medido com confiabilidade, eles injetam deliberadamente um sinal de tensão quadrado e de alta frequência nas bobinas. O motor responde de forma diferente dependendo do ângulo do rotor, então, ao examinar a corrente de alta frequência resultante, o controlador pode deduzir a posição do rotor. Essa abordagem de “injeção de alta frequência” funciona como enviar um sinal sonda e ler o eco. Em velocidades médias e altas, o motor produz um retorno natural mais forte, conhecido como força contraeletromotriz (back-EMF). Nesse regime, a equipe usa um observador matemático avançado que acompanha o comportamento do motor e estima a posição e a velocidade do rotor a partir das tensões e correntes medidas.
Tornando o observador digital mais inteligente e mais silencioso
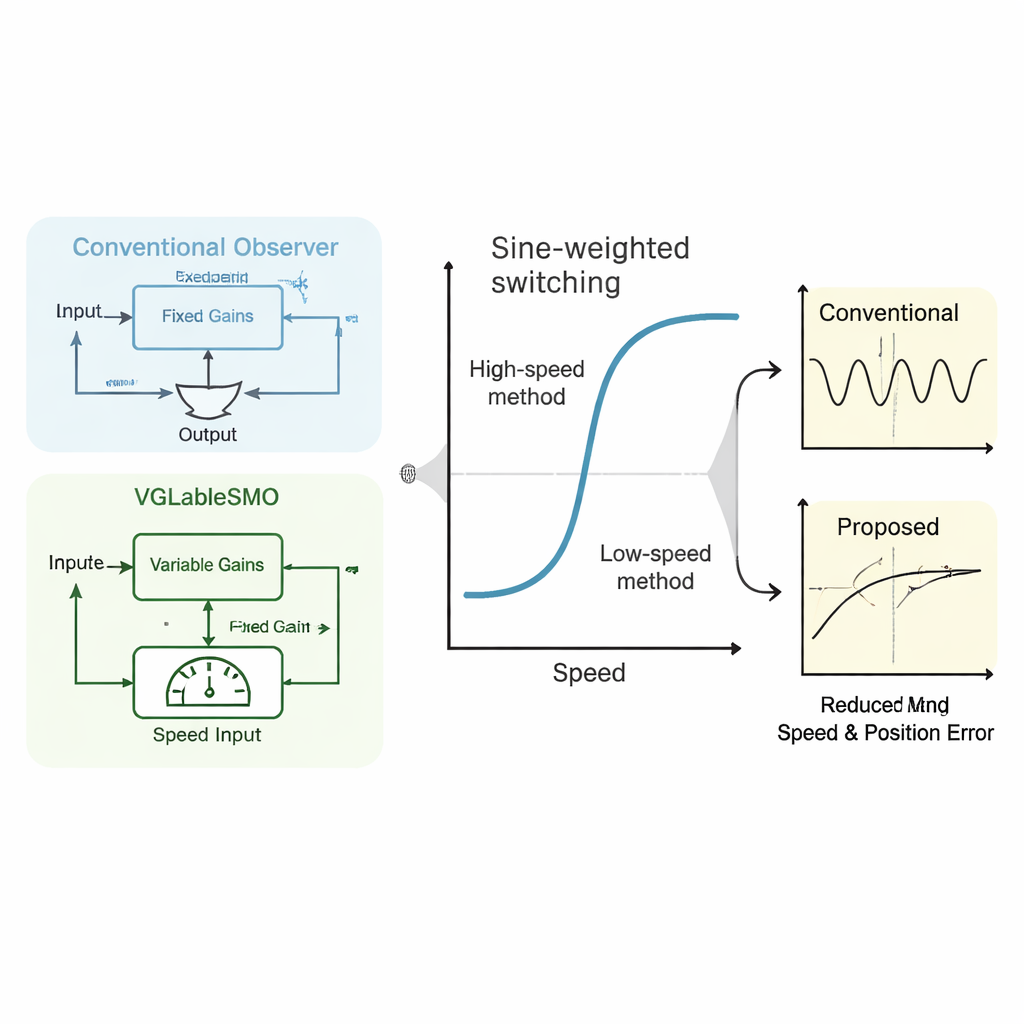
A inovação central no lado de alta velocidade é um observador aprimorado chamado observador deslizante super-twisting linear de ganho variável (VGLSTSMO). Observadores por modo deslizante tradicionais são valorizados por sua robustez contra ruído e perturbações, mas frequentemente sofrem de “chattering”, pequenas oscilações rápidas que podem se propagar em torque e velocidade. Eles também dependem de parâmetros fixos internos que podem ter bom desempenho em uma condição de operação e desempenho ruim em outra. O observador proposto ajusta seus ganhos internos automaticamente conforme a velocidade do motor muda e adiciona um termo corretivo que puxa suavemente as estimativas em direção aos valores reais. Um mecanismo adaptativo refina ainda mais a estimativa da tensão interna do motor, melhorando a precisão tanto da velocidade quanto da posição. Simulações por computador mostram que esse observador mais inteligente reduz o erro de posição em velocidades médias–altas de cerca de 0,9 radianos para aproximadamente 0,2 radianos e encurta o tempo de acomodação do sistema após uma variação de carga.
Suavizando a transição entre baixas e altas velocidades
Executar dois métodos de estimação diferentes traz outro problema: como transferir a confiança de um para o outro de forma suave à medida que o motor acelera. Uma abordagem simples é reduzir um método enquanto aumenta o outro usando um ponderador linear, mas isso ainda pode causar solavancos no torque e na velocidade. Os autores propõem uma função de ponderação mais suave, em forma de seno. Dentro de uma banda de transição escolhida, o sistema de controle desloca gradualmente a confiança do método de baixa velocidade para o observador de alta velocidade seguindo uma curva ondulatória suave em vez de um rampa abrupta. Essa mistura refinada reduz de modo perceptível pulos de velocidade e falhas angulares durante a troca, diminuindo o erro angular transitório e reduzindo pela metade o tempo de assentamento dos erros.
O que isso significa para máquinas do mundo real
No geral, a estratégia combinada — sondar o motor em baixa velocidade, usar um observador adaptativo em velocidades mais altas e alternar entre eles com uma ponderação senoidal suave — oferece controle estável e preciso em toda a faixa de velocidades sem sensores mecânicos. Em simulações, o método proposto mantém a sobressinal de velocidade e os erros em regime permanente reduzidos, ao mesmo tempo que evita o chattering severo que pode causar ruído, desgaste e desconforto. Para aplicações do dia a dia, isso significa que veículos elétricos, acionamentos industriais e sistemas de propulsão podem ficar mais confiáveis, mais compactos e mais baratos de fabricar, tudo isso mantendo controle de movimento preciso sem depender de sensores frágeis montados no eixo.
Citação: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Palavras-chave: controle de motor sem sensor, motor síncrono de ímã permanente, observador por modo deslizante, injeção de sinal de alta frequência, sistemas de acionamento elétrico