Clear Sky Science · pt
Influência dos parâmetros estruturais no espaço de trabalho de robôs paralelos Delta e otimização da adaptabilidade de trajetória para aplicações de classificação de folhas de chá frescas
Robôs entram na fábrica de chá
Folhas de chá frescas são delicadas: amassar um botão ou machucar uma folha prejudica a bebida final. Ainda assim, classificar essas folhas manualmente é uma tarefa cansativa e lenta. Este artigo explora como um robô industrial rápido e leve — chamado robô Delta — pode ser ajustado para se mover com rapidez e precisão sobre correias transportadoras de chá, manuseando as folhas com delicadeza e confiabilidade.
Por que as folhas de chá exigem tratamento especial
No processamento moderno do chá, classificar folhas frescas é vital para qualidade e preço. Trabalhadores humanos têm dificuldade em manter o ritmo e a consistência, sobretudo em turnos longos. Robôs Delta, amplamente usados em embalagens de alta velocidade, parecem uma solução natural: são rígidos, precisos e podem mover-se em velocidades impressionantes. No entanto, a maioria dos projetos anteriores visava objetos genéricos, como caixas ou porcas, não botões de chá frágeis confinados a uma zona estreita entre duas correias. O “espaço de trabalho” do robô — a região tridimensional que ele pode alcançar — precisa corresponder a essa área apertada e seguir um movimento em forma de portão: agarrar, levantar, atravessar e posicionar, tudo sem colidir com suas próprias peças nem errar os alvos.
Como a geometria do robô controla onde ele pode alcançar
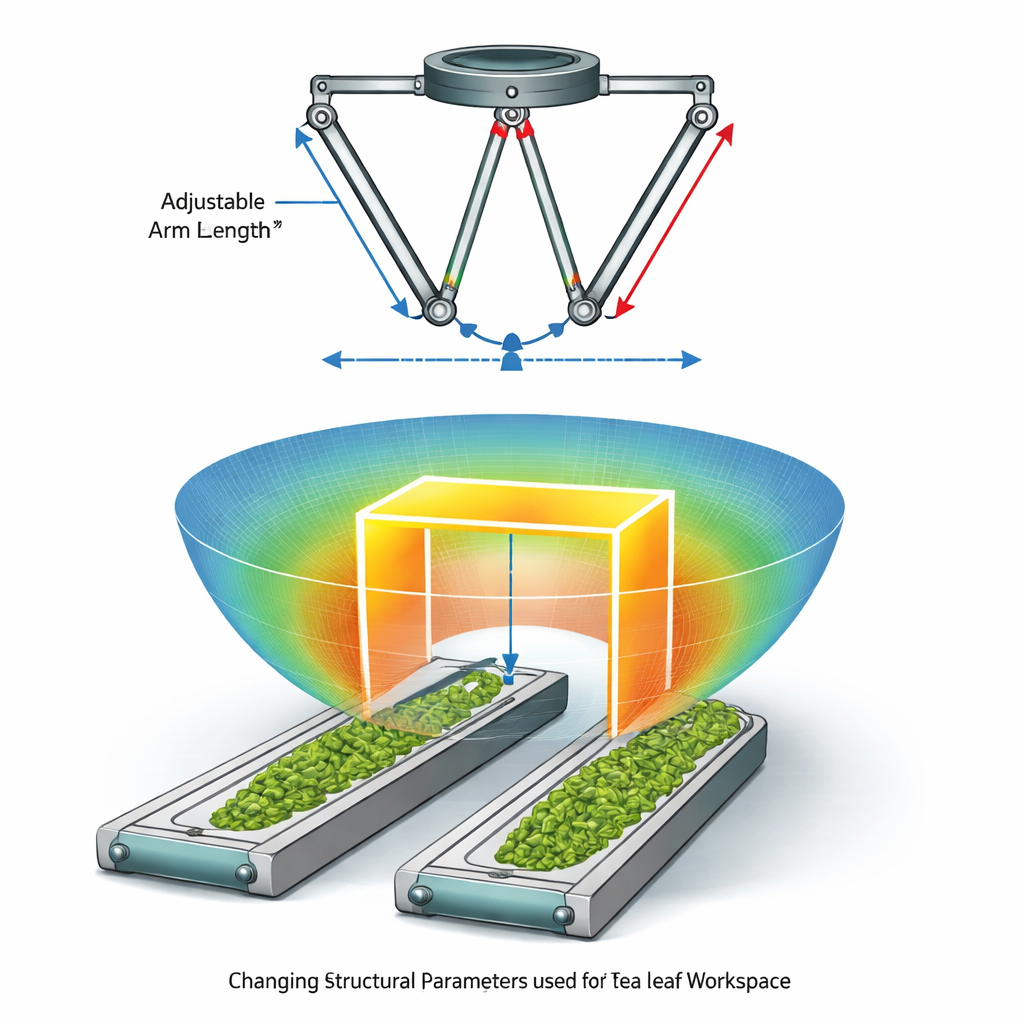
Os autores começam construindo uma descrição matemática detalhada do movimento do robô Delta. Eles relacionam os ângulos das três articulações motrizes com a posição exata da pequena plataforma móvel que carrega um venturi de sucção. Utilizando cálculos diretos (ângulos → posição) e inversos (posição → ângulos), definem todos os pontos que o efetuador final pode alcançar fisicamente quando os ângulos das juntas estão limitados a uma faixa segura. Com essas equações codificadas em MATLAB, simulam o volume total alcançável do robô e o exibem de vários pontos de vista como uma nuvem colorida em forma de tigela. Esse espaço de trabalho serve então de base para avaliar se um dado projeto mecânico consegue seguir a trajetória de classificação do chá.
Testando muitos projetos com experimentos virtuais
Em vez de construir vários protótipos físicos, a equipe trata quatro escolhas geométricas-chave como botões de projeto: comprimento dos braços superiores (L), comprimento dos braços inferiores (l), raio do triângulo da base fixa (R) e raio do triângulo móvel (r). Eles usam um arranjo experimental ortogonal, que amostra de forma eficiente combinações desses quatro parâmetros em três níveis cada, gerando nove robôs virtuais. Para cada um, o programa calcula o volume total do espaço de trabalho e mostra como ele se sobrepõe a uma caixa de trajetória padronizada em forma de portão medindo 200 mm de altura, 400 mm de largura e 200 mm de profundidade. Isso permite aos pesquisadores ver não apenas o tamanho de cada espaço de trabalho, mas também se ele cobre a região onde as folhas de chá transitam nas correias.
Descobrindo quais dimensões mais importam
Ao comparar os nove projetos simulados, o estudo classifica a força com que cada escolha estrutural influencia o alcance utilizável. O vencedor claro é o comprimento do braço passivo (inferior): braços inferiores mais longos aumentam consideravelmente o espaço de trabalho. Em seguida em importância vem o comprimento do braço ativo (superior), que também amplia a faixa de movimento, mas pode introduzir vibração se for longo demais. O raio da base tem efeito moderado; se a base for muito larga, os braços móveis colidem mais facilmente com a estrutura, reduzindo o volume realmente utilizável. O raio da plataforma móvel tem o efeito mais fraco, mas uma plataforma menor ajuda ligeiramente ao abrir espaço para o movimento dos braços. Análises de alcance e variância mostram que, embora alguns conjuntos de parâmetros produzam o maior volume total, eles nem sempre cobrem a estreita região em forma de portão que importa para a classificação de chá.
Um projeto que se ajusta à linha de chá
A configuração mais prática revela-se não a de maior volume total, mas aquela cujo espaço de trabalho envolve com precisão a trajetória em forma de portão. Uma combinação particular — braços superiores de 250 mm, braços inferiores de 400 mm, raio da base de 90 mm e raio da plataforma móvel de 50 mm — cobre totalmente o caminho exigido entre as duas correias, mantendo o robô compacto e estável. A uma altura de operação em torno de 325 mm acima do plano de referência, o robô alcança sua maior extensão utilizável, mais do que suficiente para atravessar ambas as correias e completar o ciclo agarrar–levantar–transladar–posicionar sem sair da região segura.
O que isso significa para futuras fábricas de chá
Para não especialistas, a mensagem chave é que pequenas mudanças no comprimento dos membros do robô e no tamanho das plataformas podem fazer a diferença entre uma máquina que apenas se move de forma impressionante em espaço livre e uma que funciona de forma confiável em uma linha de produção real. Ao quantificar como cada parâmetro estrutural molda o volume alcançável e sua sobreposição com uma trajetória de portão realista, este estudo oferece uma receita para projetar robôs Delta que classifiquem folhas de chá rápida, precisa e delicadamente. A mesma abordagem pode orientar robôs personalizados para outros alimentos ou produtos frágeis onde velocidade, precisão e manuseio suave precisam ser atendidos simultaneamente.
Citação: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Palavras-chave: robô delta, classificação de folhas de chá, espaço de trabalho do robô, pick-and-place, automação industrial