Clear Sky Science · pt
Desenvolvimento e avaliação de um sistema de posicionamento de pacientes guiado pela superfície para terapia por captura de nêutrons de boro
Mirando com mais precisão os nêutrons no combate ao câncer
A Terapia por Captura de Nêutrons de Boro (BNCT) é um tratamento promissor que pode danificar seletivamente células tumorais enquanto preserva grande parte do tecido saudável ao redor. Mas para que essa precisão faça diferença, os médicos precisam posicionar o paciente exatamente no local correto em frente a um feixe fixo de nêutrons — muitas vezes com precisão na ordem de um milímetro. Este artigo descreve um novo sistema de posicionamento guiado por câmera e robô projetado para tornar esse ajuste delicado mais rápido, mais preciso e menos dependente da firmeza de mão e do julgamento de um técnico.
Por que o posicionamento é tão importante
Diferentemente de muitas máquinas modernas de radioterapia que podem girar ao redor do paciente e remodelar seus feixes de raios X, a BNCT depende de uma fonte pesada e fixa de nêutrons com opções limitadas para direcionamento do feixe. É o paciente, e não o feixe, que precisa ser movido para o lugar certo. Tradicionalmente, a equipe usa lasers, marcas na pele e deslocamentos manuais da mesa para isso. Esse processo é lento, depende fortemente da habilidade do operador e pode deixar pequenos erros de posicionamento que alteram a dose realmente recebida pelo tumor — e por órgãos vizinhos. À medida que centros de BNCT se abrem para tratar tumores complexos na cabeça, pescoço e outras áreas de difícil acesso, essas limitações tornam‑se um obstáculo sério.
Um assistente de alta tecnologia: câmeras, software e um robô
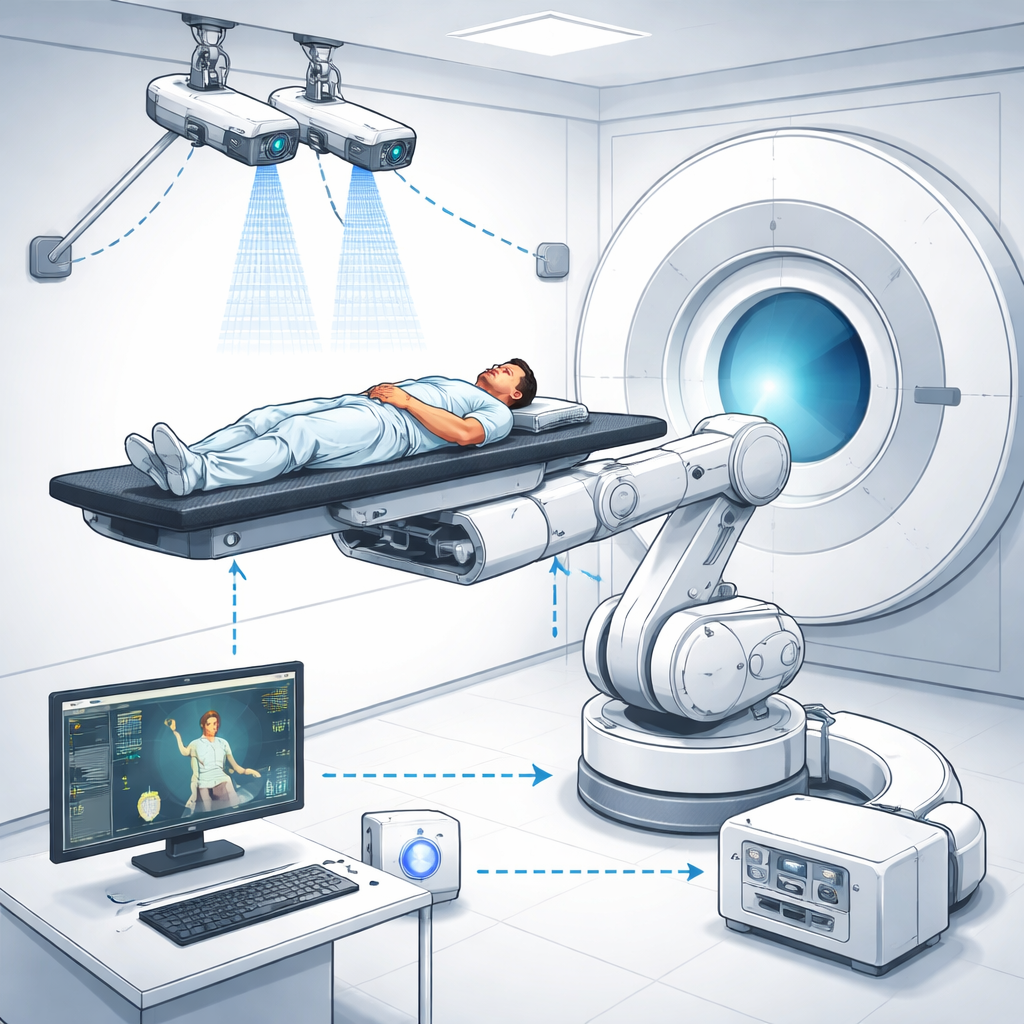
Para enfrentar esse problema, a equipe de pesquisa construiu um sistema integrado Surface‑Guided BNCT (SG‑BNCT) que combina três componentes principais: um programa de planejamento de tratamento especializado chamado NeuMANTA, um par de câmeras estereoscópicas binoculares e um robô industrial de seis eixos que carrega a mesa de tratamento. No NeuMANTA, os médicos planejavam o tratamento BNCT em imagens de TC, incluindo o ponto exato por onde o feixe de nêutrons deve passar e três pequenas marcas de referência, ou marcadores fiduciais, na pele do paciente. Esses marcadores definem a posição do paciente nas imagens de planejamento e conectam esse plano às coordenadas reais da sala de tratamento por meio de matrizes de transformação matemática.
Como câmeras 3D enxergam e corrigem o posicionamento
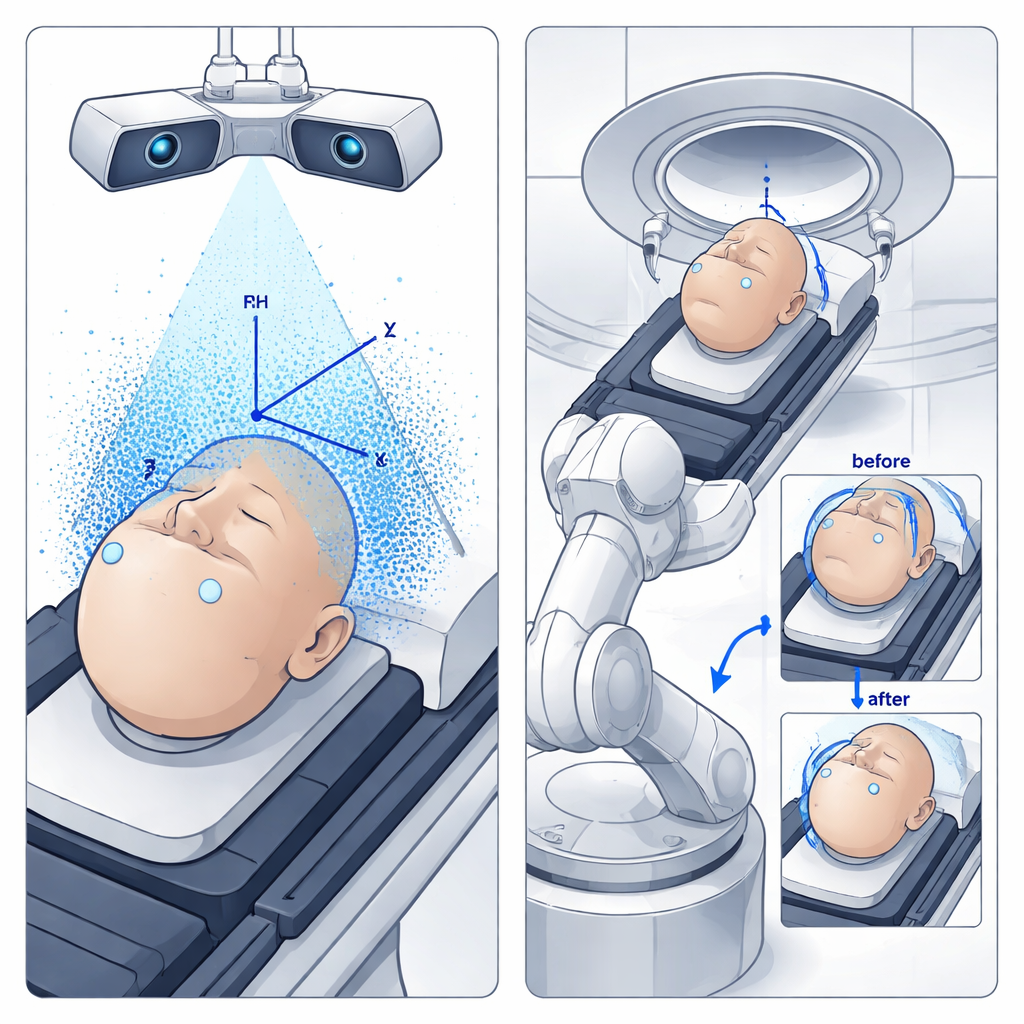
Na sala de tratamento, duas câmeras de alta resolução observam o paciente de ângulos diferentes, muito parecido com os olhos humanos. Usando um algoritmo moderno de detecção de objetos (YOLO) treinado com mais de mil imagens, o sistema localiza rapidamente os mesmos marcadores fiduciais na superfície do paciente. Comparando como cada marcador aparece nas visões da câmera esquerda e direita, o computador reconstrói suas posições 3D e cria uma nuvem de pontos detalhada da superfície. A partir de três marcadores não colineares, reconstrói‑se um sistema de coordenadas do paciente e o compara com o sistema de coordenadas definido no plano de tratamento. Qualquer discrepância entre a posição planejada e a real é convertida em comandos de translação e rotação — seis graus de liberdade no total — para o robô industrial que sustenta a mesa do paciente.
Testes com um paciente substituto
Antes de usar o sistema em pacientes reais, a equipe o testou com um fantoma antropomórfico — um modelo em forma humana — equipado com marcadores internos e de superfície visíveis tanto em exames de TC quanto para as câmeras. Eles criaram múltiplos cenários de tratamento no NeuMANTA com diferentes direções de feixe e então pediram ao sistema SG‑BNCT que reproduzisse esses planos movendo automaticamente o fantoma para a posição correta. Um laser posicionado no centro da abertura do feixe de nêutrons atuou como substituto do feixe real, de modo que os pesquisadores pudessem medir diretamente o quanto o ponto final no fantoma desviou do alvo pretendido, tanto ao longo da direção do feixe (distância fonte‑pele) quanto lateralmente no plano perpendicular ao feixe.
Quão perto o sistema chegou?
Em 24 montagens experimentais, os erros de posicionamento do sistema foram tipicamente inferiores a 1 milímetro em ambas as direções, com os piores erros em uma única passagem chegando a cerca de 2 a 3 milímetros ao longo do eixo do feixe. Os autores atribuíram essas discrepâncias residuais a três fontes principais: a espessura das fatias das imagens de TC, pequenas incertezas de calibração nas câmeras estereoscópicas e minúsculas imprecisões ao nível de pixel quando o software detecta os marcadores. É importante notar que o sistema foi projetado para operar em malha fechada: ele reme medidamente as posições dos marcadores, atualiza o alinhamento 3D e comanda movimentos finos adicionais do robô até que o erro remanescente caia abaixo de um limiar pré‑definido. Nesses testes iterativos, as discrepâncias finais consistentemente caíram para bem abaixo de 1 milímetro, alcançando alinhamento submilimétrico tanto em profundidade quanto nas direções laterais.
O que isso significa para os pacientes
Para pacientes que podem se beneficiar da BNCT — especialmente aqueles com tumores em regiões complexas ou sensíveis — este sistema de posicionamento guiado pela superfície e assistido por robô promete tratamentos mais confiáveis e eficientes. Ao conectar o software de planejamento diretamente a câmeras que vêem o paciente real e a um robô que pode executar movimentos precisos, o método reduz a dependência de alinhamento a laser manual e do palpite humano. Embora a versão atual seja lenta para rastreamento de movimento verdadeiramente em tempo real e até agora tenham sido realizados apenas testes estáticos, os resultados mostram que a tecnologia pode posicionar rotineiramente um paciente com precisão submilimétrica. Com melhorias adicionais de velocidade e endurecimento do hardware contra radiação, essa abordagem pode se tornar uma base prática para tratamentos de BNCT mais seguros e consistentes na clínica.
Citação: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Palavras-chave: terapia por captura de nêutrons de boro, posicionamento do paciente, estereovisão, robótica médica, guia por superfície