Clear Sky Science · pt
Rastreador global dinâmico para rastreamento online multi-câmera multi-veículo
Por que câmeras de tráfego mais inteligentes importam
Qualquer pessoa que já ficou presa em um engarrafamento ou preocupada com acidentes rodoviários conhece os limites dos sistemas de tráfego atuais. Cidades modernas agora instalam redes de câmeras ao longo de rodovias e em interseções para observar o tráfego em tempo real. Mas fazer com que essas câmeras trabalhem em conjunto — para seguir o mesmo carro suavemente de uma câmera para outra — é surpreendentemente difícil. Este estudo apresenta uma nova forma de rastrear veículos através de muitas câmeras ao mesmo tempo, prometendo monitoramento mais rápido e confiável que pode tornar as vias mais seguras e a gestão do tráfego mais responsiva.
O problema do rastreamento de tráfego atual
Os sistemas tradicionais tratam cada câmera quase como um mundo à parte. Primeiro, eles detectam veículos em cada vídeo e depois constroem trajetórias curtas para cada carro dentro do campo de visão de uma única câmera. Só depois de analisar longos trechos de vídeo gravado é que tentam “costurar” essas trajetórias entre câmeras usando agrupamentos pesados de dados e regras manuais sobre o traçado das vias e a posição das câmeras. Esse estilo offline, feito a posteriori, é lento, consome muito poder de computação e tem dificuldades quando as cenas de tráfego mudam, câmeras são movidas ou novos pontos de vista são adicionados. Também enfrenta problemas quando as câmeras mostram veículos em tamanhos e ângulos muito diferentes, o que pode fazer o mesmo carro parecer dois completamente distintos.
Uma nova abordagem: rastrear tudo em tempo real
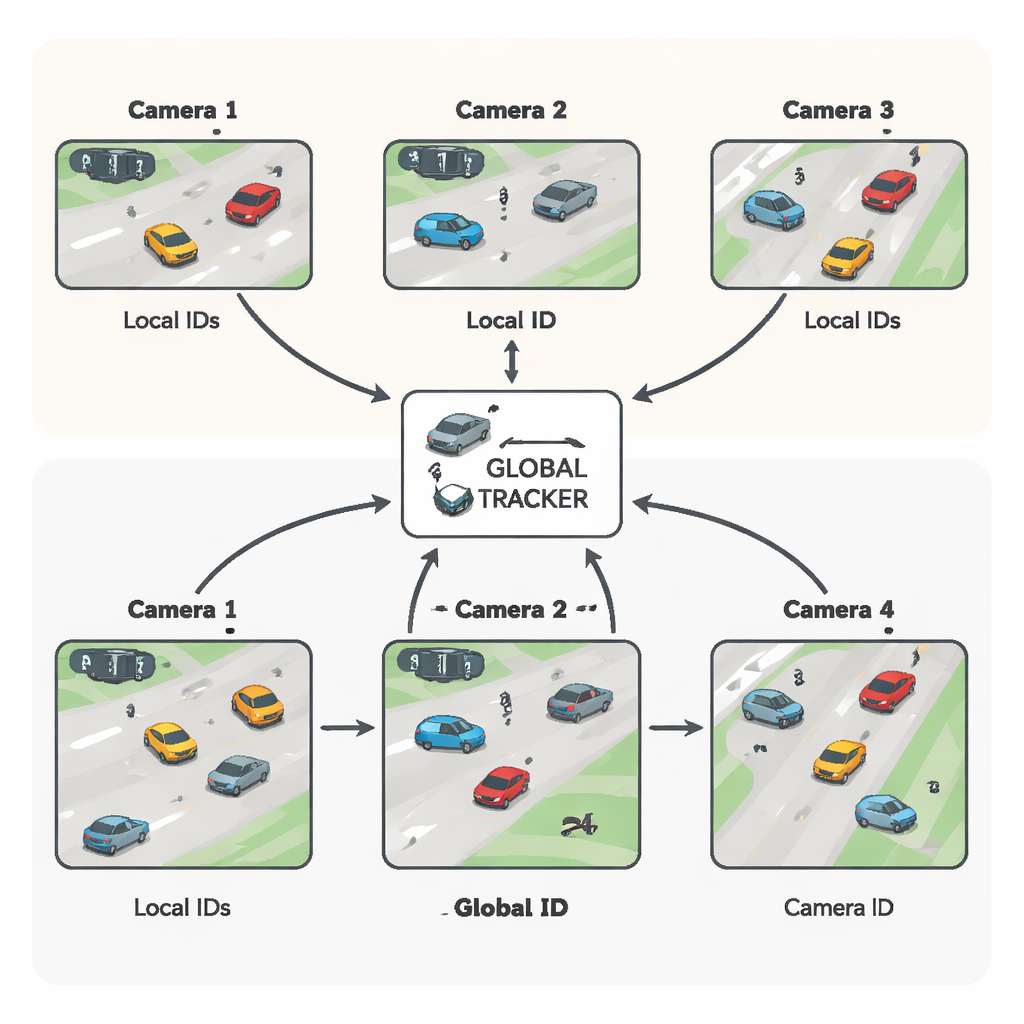
Os pesquisadores propõem uma estrutura inédita chamada Rastreamento Global Dinâmico, ou DGT, projetada desde o início para uso em tempo real. Em vez de esperar até que todo o vídeo seja coletado e então tentar ligar as trajetórias dos veículos, o DGT constrói esses vínculos à medida que os dados chegam. Cada câmera ainda detecta veículos e monta trajetórias curtas dentro de sua visão, mas assim que essas trajetórias são atualizadas, elas são imediatamente comparadas com trajetórias de outras câmeras. Um algoritmo clássico de pareamento é usado para decidir se duas trajetórias de diferentes pontos de vista pertencem ao mesmo carro. Esse processo online, passo a passo, substitui o agrupamento massivo sobre todos os dados passados, reduzindo o custo computacional e tornando possível acompanhar o tráfego ao vivo.
Ver o mesmo carro de ângulos diferentes
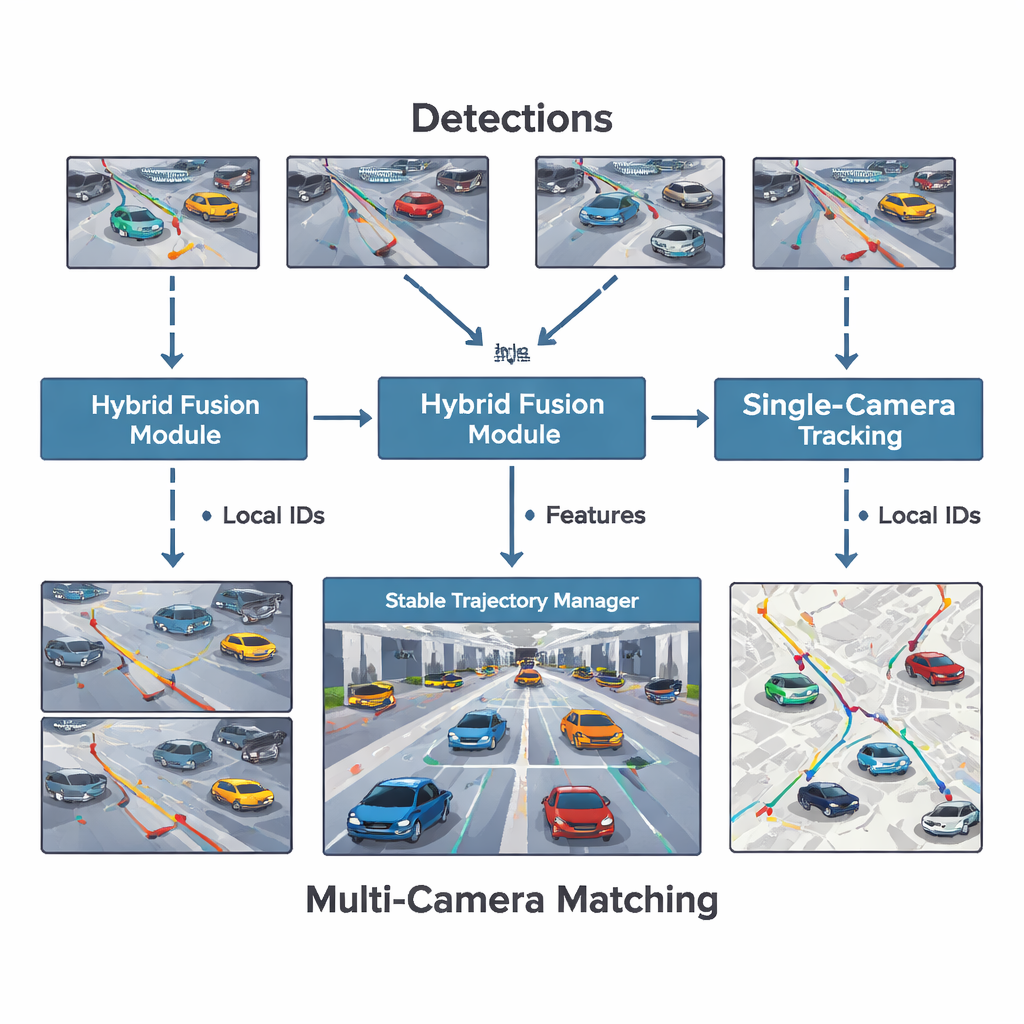
Um grande desafio é que o mesmo veículo pode aparecer grande e detalhado em uma câmera e pequeno e desfocado em outra, ou iluminado de forma diferente em um túnel versus em uma estrada aberta. Para lidar com isso, o DGT inclui um Módulo Híbrido de Fusão que combina detalhes finos e contexto mais amplo de cada imagem. Ele processa os quadros das câmeras de duas maneiras ao mesmo tempo: um ramo se concentra em detalhes nítidos e em pequena escala, como bordas e texturas, enquanto o outro ramo foca em padrões e contexto mais globais. O sistema então combina as duas visões em uma descrição única e estável da aparência do veículo. Testes mostram que essa abordagem mantém a confiança do sistema elevada, mesmo quando o tamanho ou a nitidez do carro muda drasticamente entre as câmeras.
Manter trajetórias estáveis e confiáveis
O DGT também introduz um Gerenciador de Trajetórias Estáveis, que atua como um centro de controle de qualidade para as decisões de rastreamento. Ele filtra detecções incertas, gerencia por quanto tempo um carro pode desaparecer atrás de outro veículo ou obstáculo antes de ser considerado “ausente”, e remove objetos que não se movem ao longo do tempo, como carros estacionados ou barreiras à beira da estrada. Limiares de tempo e movimento escolhidos com cuidado permitem ao sistema distinguir entre um carro temporariamente escondido em um túnel e outro que realmente saiu da cena ou entrou na visão de outra câmera. Juntas, essas regras ajudam a manter IDs consistentes para cada veículo, reduzindo saltos súbitos, perdas ou fusões equivocadas entre trajetórias.
O que isto significa para as ruas do dia a dia
Em testes em larga escala tanto em um túnel rodoviário chinês quanto em uma movimentada interseção de uma cidade americana, o DGT alcançou alta precisão enquanto rodava rápido o suficiente para uso em tempo real. Ao contrário de muitos sistemas anteriores que foram ajustados para um único tipo de cena, o DGT lidou com visões de câmeras sobrepostas e não sobrepostas sem precisar de entradas manuais detalhadas sobre o traçado das vias. Para motoristas e moradores urbanos, esse tipo de rastreamento robusto e flexível significa que centros de controle de tráfego poderiam reagir mais rapidamente a acidentes, congestionamentos ou comportamentos incomuns, usando uma imagem mais clara e contínua de como os veículos se movem pela rede de estradas e câmeras.
Citação: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Palavras-chave: rastreamento de veículos multi-câmera, sistemas inteligentes de transporte, monitoramento de tráfego em tempo real, visão computacional, cidades inteligentes