Clear Sky Science · pt
YOLO11-WLBS: um modelo eficiente para detecção de defeitos em pavimentos
Por que inspeções rodoviárias melhores importam
Cada rachadura e buraco na pista é mais do que um incômodo visual — pode reduzir a vida útil do pavimento, danificar veículos e contribuir para acidentes. Hoje, muitas rodovias ainda são inspecionadas por pessoas dirigindo devagar com pranchetas ou câmeras simples, um processo demorado, caro e sujeito a erros. Este estudo apresenta o YOLO11-WLBS, um sistema de visão computacional mais inteligente e leve que pode identificar diferentes tipos de danos na pista em tempo real, mesmo em um smartphone ou drone, prometendo manutenção mais rápida e segura das nossas redes viárias.
De patrulhas lentas a câmeras inteligentes
À medida que o tráfego cresce e as redes rodoviárias se expandem, defeitos como fissuras transversais e longitudinais, fissuramento em “crosta de alligator”, fissuras oblíquas, buracos e reparos em remendo tornam-se mais comuns. A inspeção tradicional — levantamentos a pé ou de carro, ou processamento de imagem simples — depende fortemente do julgamento humano e tem dificuldades em condições de pouca luz ou cenas com muitos elementos. Na última década, o aprendizado profundo e, em particular, a família de redes YOLO para detecção de objetos transformaram a análise de imagens ao aprender padrões diretamente a partir de fotos brutas. Sistemas anteriores baseados em YOLO para pavimentação melhoraram a precisão, mas ainda enfrentavam um dilema central: modelos suficientemente precisos costumavam ser grandes e lentos demais para uso em tempo real em drones, veículos ou dispositivos portáteis.
Um motor ajustado sobre o YOLO11
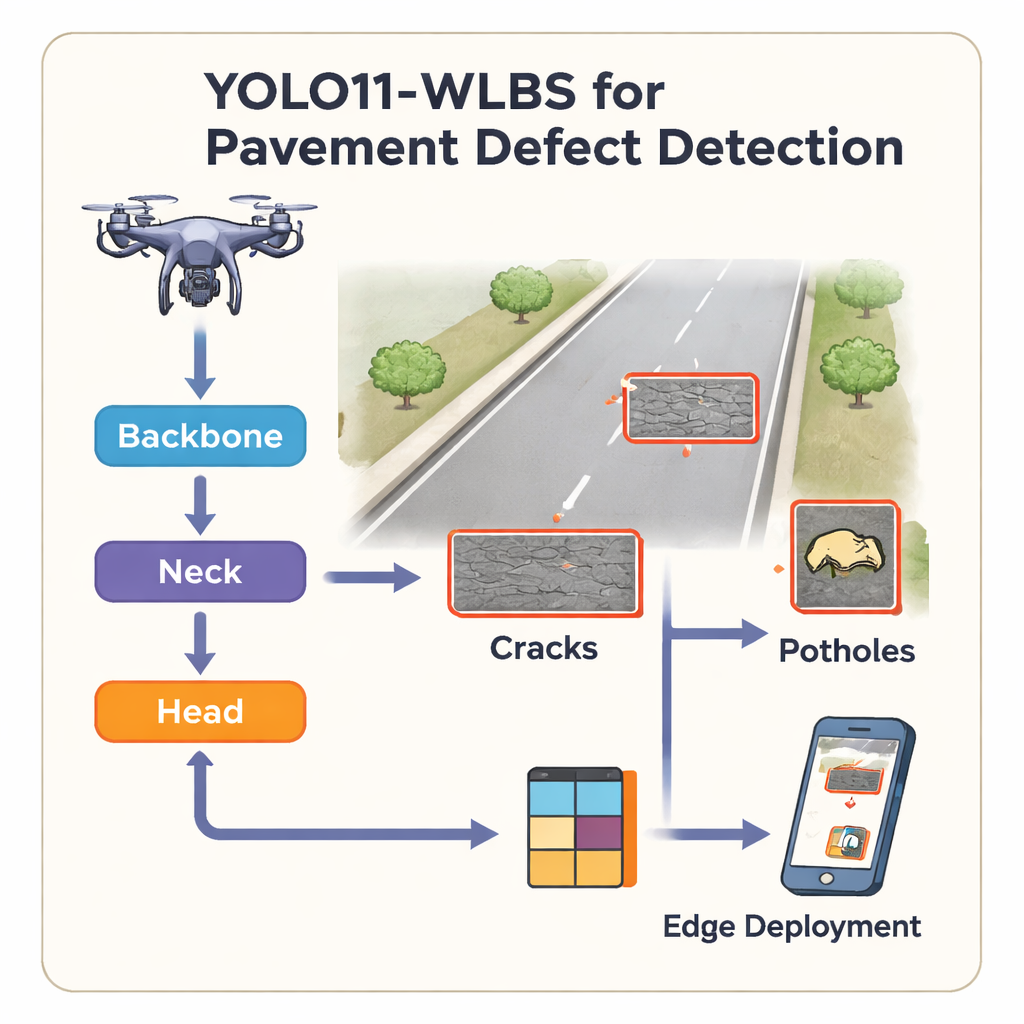
Os autores partem do YOLO11, uma rede moderna de detecção de objetos que já equilibra velocidade e precisão, e a adaptam para os desafios específicos das superfícies rodoviárias. Seu modelo aprimorado, chamado YOLO11-WLBS, mantém o desenho habitual em três estágios — “backbone” para extração de características, “neck” para combinar informações em diferentes escalas, e “head” para desenhar caixas e rótulos ao redor dos defeitos — mas acrescenta quatro melhorias selecionadas com cuidado. Juntas, essas adições aguçam a visão do modelo para fissuras finas, melhoram o tratamento de múltiplos tamanhos de defeito e reduzem cálculos desnecessários para que ele funcione de forma eficiente em dispositivos de borda.
Quatro truques inteligentes para ver fissuras
A primeira melhoria usa convolução baseada em wavelet para enfatizar detalhes de alta frequência — as mudanças bruscas de brilho que contornam fissuras e pequenos buracos — sem inflar o modelo. Isso ajuda o sistema a perceber defeitos fracos, finos ou irregulares que filtros padrão poderiam perder. Em seguida, uma etapa de “extração adaptativa leve” reorganiza os mapas de características para que a rede concentre seu esforço nos canais mais informativos, enquanto reduz o total de parâmetros em cerca de um quarto. Uma pirâmide de características bidirecional então permite que a informação flua para cima e para baixo entre escalas grossas e finas, melhorando o reconhecimento tanto de pequenas fendas quanto de padrões de rachaduras maiores e conectados. Por fim, um mecanismo de atenção simples destaca as regiões mais importantes em cada mapa de características, guiando o detector em direção a verdadeiros defeitos e afastando-o de distrações como demarcações de faixa, sombras ou manchas.
Comprovando que funciona no mundo real
Para testar o YOLO11-WLBS, a equipe o treinou e avaliou em imagens de alta resolução capturadas por drone de pavimentos reais, cobrindo mais de dez mil defeitos rotulados em seis categorias. Em comparação com o YOLO11 original, o novo modelo eleva a precisão de 0,853 para 0,947 e o recall de 0,698 para 0,895, o que significa que gera menos falsos alarmes e perde muito menos defeitos. Sua pontuação geral de detecção (mAP@0.5) sobe 12,2%, enquanto o número de parâmetros cai cerca de 25,5%. O sistema permanece preciso em condições de baixa e alta iluminação e quando as imagens estão borradas ou reduzidas, e transfere bem para um conjunto de dados de drone separado com pontos de vista diferentes e resolução menor. Os autores chegam a implantar uma versão totalmente quantizada em um smartphone Android, alcançando quase 30 quadros por segundo para detecção de vídeo ao vivo de múltiplos tipos de fissuras.
O que isso significa para motoristas e cidades
Em termos simples, o YOLO11-WLBS é um par de olhos mais rápido e mais preciso para nossas vias. Ao combinar melhor detecção de contornos, uso mais inteligente da capacidade do modelo, fusão de características em múltiplas escalas e atenção leve, ele encontra mais defeitos enquanto roda em hardware modesto como drones e telefones. Isso torna prático escanear longos trechos de pavimento com frequência, detectar problemas cedo e planejar reparos com mais eficiência, tudo sem enviar grandes equipes para o tráfego. Embora o modelo ainda tenha alguma dificuldade com defeitos raros como buracos — principalmente porque há menos exemplos para aprender — ele fornece uma base sólida para sistemas futuros que não apenas detectem onde a via está danificada, mas também estimem a gravidade do dano, orientando as cidades rumo a uma manutenção mais segura e custo-efetiva.
Citação: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Palavras-chave: detecção de defeitos em pavimentos, detecção de fissuras em estradas, YOLO11-WLBS, inspeção por drone, edge AI