Clear Sky Science · pt
Explorando as profundezas oceânicas: revelando tesouros escondidos com IoT e um modelo híbrido profundo em ensemble
Por que explorar o leito marinho está recebendo uma atualização de alta tecnologia
O oceano profundo e o solo abaixo dele escondem cabos, dutos, ruínas antigas e ecossistemas frágeis. Ainda assim, água turva, areia em suspensão e sinais fracos tornam surpreendentemente difícil ver o que há lá embaixo. Este artigo descreve uma nova forma de combinar diversos tipos de sensores com inteligência artificial para que robôs subaquáticos e sistemas de monitoramento possam detectar objetos importantes com maior precisão, rapidez e menor consumo de energia. O trabalho pode ajudar a proteger a vida marinha, resguardar infraestruturas e abrir novas fronteiras na exploração.
Muitos sensores, uma visão compartilhada das profundezas
Os equipamentos atuais de detecção subaquática tendem a se apoiar em um único sentido: um ping de sonar, uma câmera de vídeo ou um tipo de sensor de solo. Cada um funciona bem em condições ideais, mas falha quando a água fica turva, a luz diminui ou o ruído aparece. Os pesquisadores, em vez disso, imaginam o oceano como um lugar observado por uma Internet das Coisas: pequenos dispositivos em rede que escutam, observam e sentem de maneiras diferentes. Seu sistema funde dados de câmeras, radar penetração de solo, sensores de vibração sísmica, sondas térmicas e detectores eletromagnéticos em um fluxo compartilhado para análise. Ao misturar essas visões, o sistema pode reconhecer um objeto mesmo quando um sensor é confundido por lama, bolhas ou reflexos. 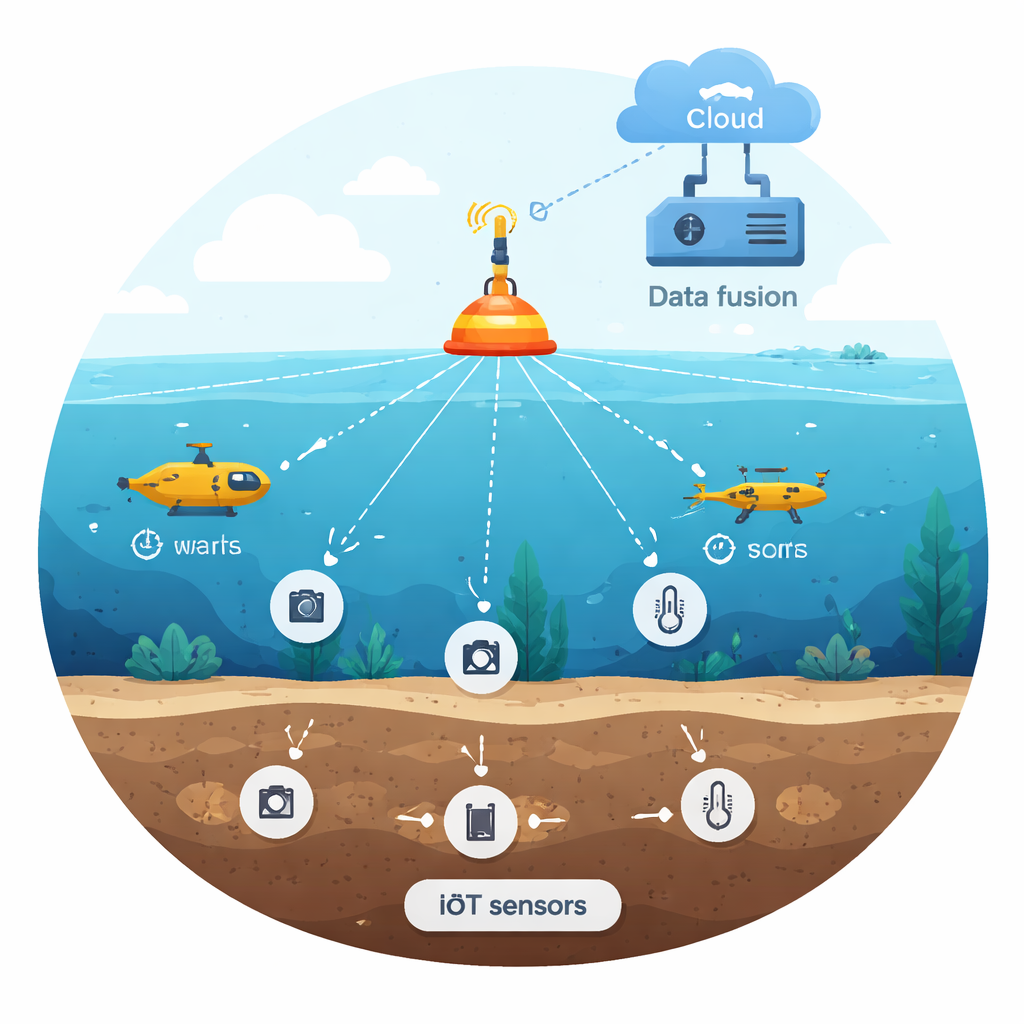
Limpeza de sinais confusos antes que cheguem ao cérebro
Os dados brutos coletados debaixo d’água estão longe de ser perfeitos. Eles vêm salpicados por picos aleatórios, falhas e leituras estranhas causadas por correntes variáveis, animais em movimento e interferência eletrônica. Antes que qualquer algoritmo inteligente tome decisões, os autores submetem esses dados a uma linha de limpeza cuidadosa. Eles usam filtros medianos para suavizar ruídos súbitos sem borrar feições reais, checagens estatísticas para detectar e remover outliers, e sincronização para que leituras de dispositivos diferentes se alinhem no tempo. Também reescalonam valores para que um sensor muito sensível não abafe os mais fracos, transformam traços de radar unidimensionais em imagens e aplicam técnicas modernas para reduzir centenas de medições a um conjunto menor e mais informativo. Tudo isso é pensado para que o sistema de aprendizado veja uma imagem nítida em vez de um borrão caótico.
Um motor de aprendizado híbrido que enxerga padrões e toma decisões
No coração da abordagem está o que os autores chamam de modelo Ensembled Deep Hybrid Learning (EDHL). Ele tem duas partes principais que desempenham papéis complementares. Primeiro, uma rede neural profunda no estilo Inception atua como os “olhos”, escaneando imagens de sensores em várias escalas ao mesmo tempo para captar tanto detalhes finos, como um cabo, quanto formas maiores, como um afloramento rochoso. A partir disso, produz descrições numéricas ricas de cada cena. Segundo, um classificador por gradient boosting serve como o “comitê de decisão”. Ele constrói muitas pequenas árvores de decisão que corrigem mutuamente os erros, refinando gradualmente a resposta correta sobre qual objeto está presente. Uma etapa de seleção de características escolhe apenas os sinais mais informativos, o que reduz o uso de memória e acelera o sistema final sem descartar o que mais importa. 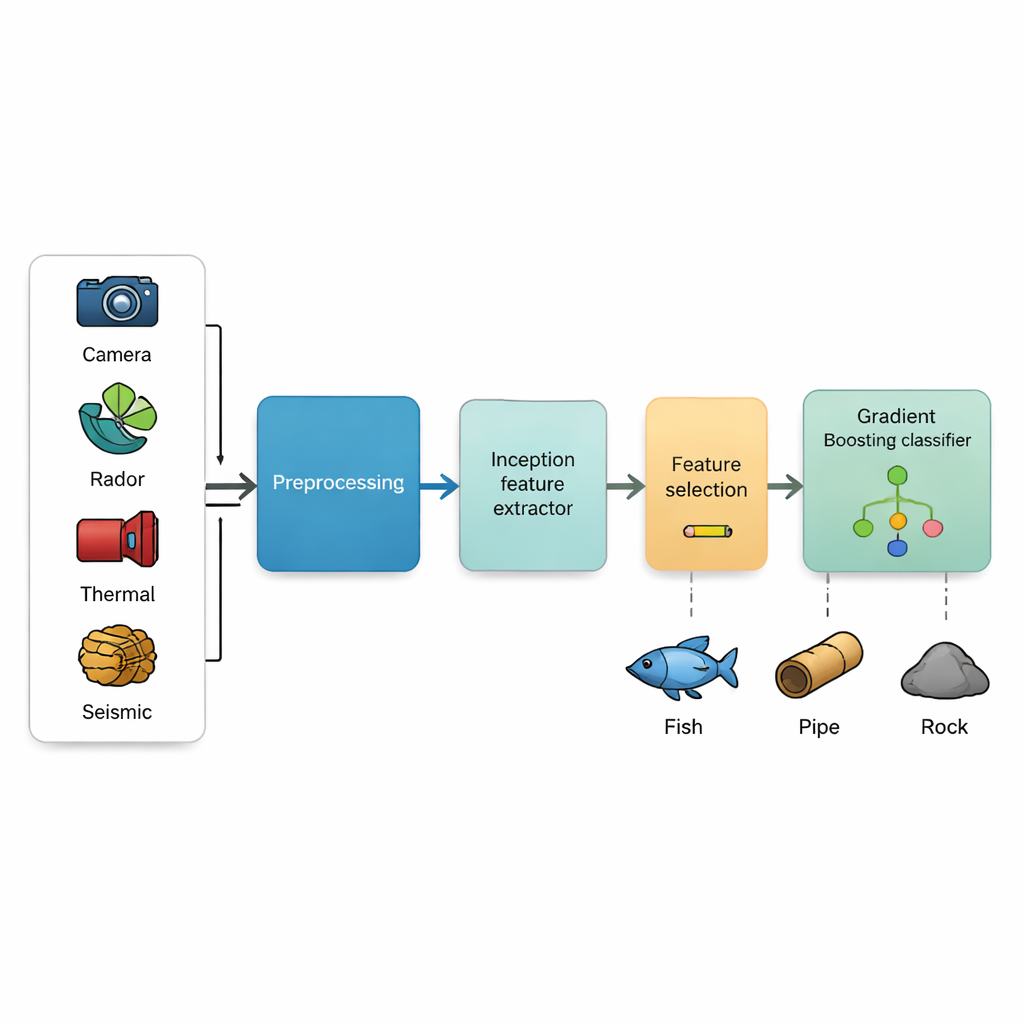
Testando o sistema
Para verificar se o projeto funciona na prática, a equipe treinou e avaliou o modelo usando uma grande coleção pública de imagens subaquáticas que inclui peixes, corais, esponjas, algas, conchas, crustáceos e outras cenas do leito marinho. Compararam várias variações de limpeza de dados e seleção de características, e confrontaram seu modelo com sistemas de aprendizado profundo bem conhecidos, como redes convolucionais clássicas, ResNet, DenseNet, EfficientNet, redes de cápsulas e até modelos baseados em transformers. A configuração EDHL, especialmente quando combinada com remoção cuidadosa de ruído e seleção de características baseada em correlação, alcançou uma acurácia superior a 98%, com muito menos alarmes falsos e objetos perdidos do que seus concorrentes. Importante, manteve esse alto desempenho rodando em hardware modesto semelhante ao que poderia ser usado em dispositivos de borda, e não apenas em servidores potentes de laboratório.
O que isso significa para a futura exploração dos oceanos
Para não especialistas, a conclusão é que os autores construíram um sistema mais inteligente de “sentir-e-pensar” para o mundo subaquático. Ao unir sensores IoT diversos com um motor de aprendizado híbrido, mostram que é possível detectar e classificar objetos do leito marinho de forma muito confiável sem precisar de computadores volumosos ou condições de visibilidade perfeitas. No futuro, esse tipo de tecnologia pode ajudar frotas de robôs subaquáticos a mapear o fundo do mar, monitorar habitats frágeis, rastrear poluição e inspecionar infraestruturas enterradas com menos erros e menor consumo de energia. Isso transforma o ambiente hostil e confuso das profundezas em um lugar onde sentidos digitais finalmente podem ver com clareza suficiente para revelar seus tesouros escondidos.
Citação: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Palavras-chave: detecção de objetos subaquáticos, sensores IoT, aprendizado profundo, exploração marinha, sensoriamento multimodal