Clear Sky Science · pt
Projeto e implementação de controle de braço robótico 6-DoF com detecção de objetos baseada em aprendizado de máquina usando microcontrolador mini
Braços robóticos mais inteligentes com orçamento menor
Imagine um braço robótico de fábrica que consegue identificar um objeto, decidir como agarrá-lo e mover-se suavemente para a posição — tudo sem depender de um computador volumoso ou de conexão com a nuvem. Este artigo descreve exatamente isso: um braço robótico de seis articulações (6-DoF) que vê e raciocina usando um microcontrolador minúsculo e de baixo custo. Para leitores interessados em como a inteligência artificial está saindo dos centros de dados e entrando em máquinas do dia a dia, este trabalho mostra como visão e controle avançados podem funcionar em hardware pouco maior que um pendrive.
Por que reduzir os "cérebros" robóticos importa
Robôs industriais tradicionais frequentemente dependem de computadores externos potentes para reconhecer objetos e planejar movimentos. Isso aumenta custo, cabeamento e complexidade técnica, o que pode ser um obstáculo para pequenas e médias empresas. Os autores propuseram demonstrar que um único microcontrolador barato poderia fazer quase tudo: ver objetos, decidir onde eles estão no espaço 3D, planejar como o braço deve se mover e acionar os motores que executam a tarefa. Mantendo o processamento a bordo, o sistema se torna mais portátil, mais eficiente energeticamente e mais fácil de implantar em ambientes apertados ou mutáveis, desde pequenas fábricas até laboratórios de ensino.
Um braço flexível que se monta sozinho
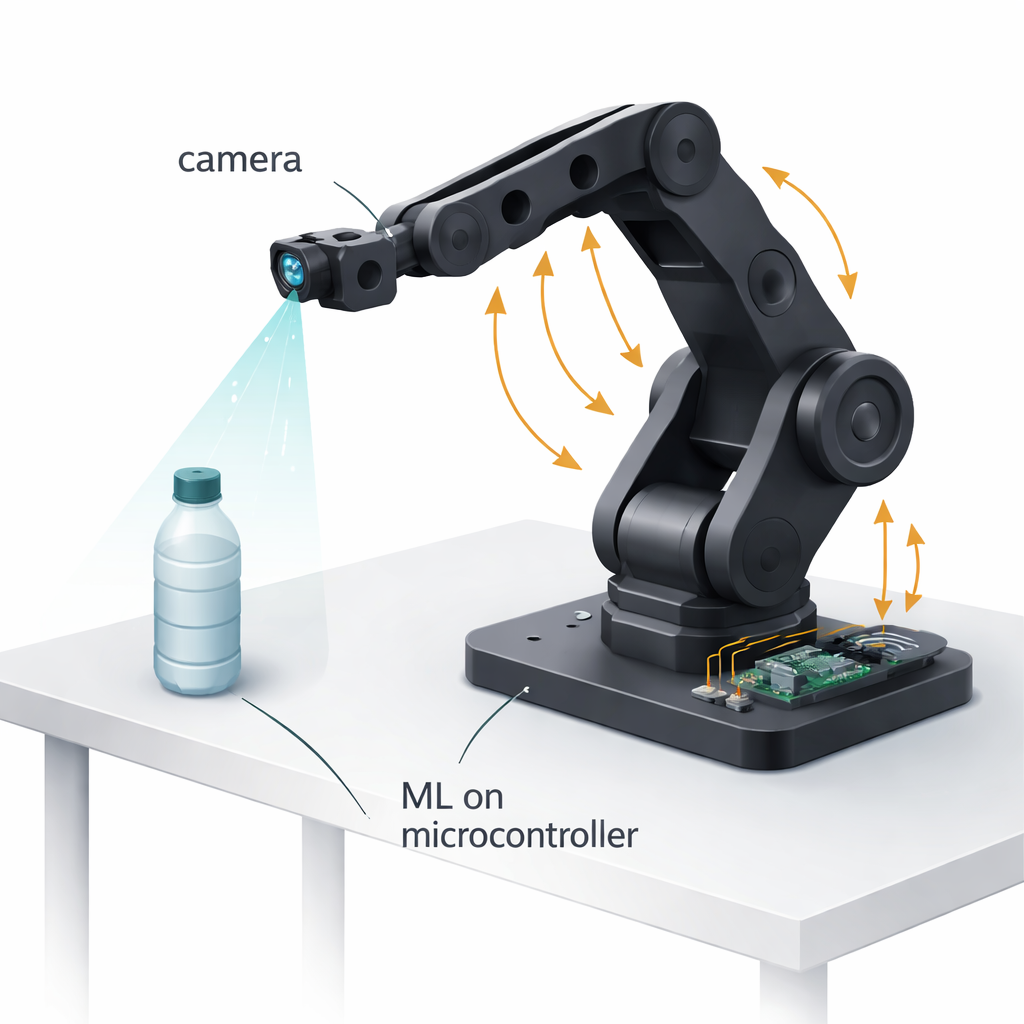
A equipe projetou um braço robótico de seis articulações do zero usando principalmente peças plásticas impressas em 3D para mantê-lo leve e acessível. Servomotores hobby com alto torque movem cada junta, e os pesquisadores modificaram esses motores para ler seus ângulos exatos em tempo real, possibilitando controle preciso em malha fechada. Um garra personalizada de dois dedos na ponta inclui um sensor de corrente simples: ao monitorar quanta corrente elétrica o motor da garra consome, o sistema pode inferir quanta força está sendo aplicada e ajustar automaticamente a pinça para segurar objetos firmemente sem esmagá-los nem deixá-los cair. Montada no “pulso” do braço há uma pequena câmera full-HD que se move junto com o braço, oferecendo ao sistema uma visão em primeira pessoa da cena à frente da garra.
Ensinando um chip minúsculo a ver garrafas
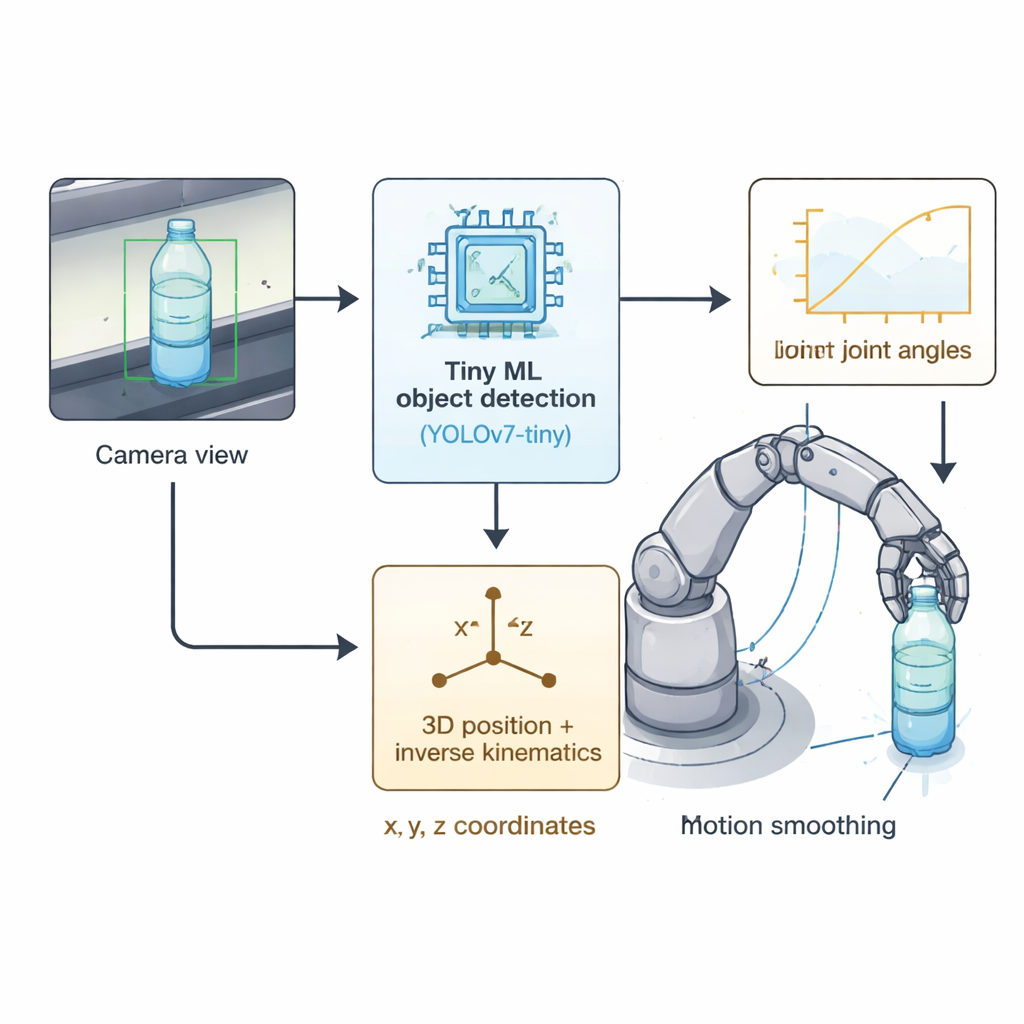
No coração da visão do sistema está uma versão compacta de uma rede de detecção de objetos popular chamada YOLOv7-tiny. Os pesquisadores treinaram esse modelo com mais de 2.500 imagens de garrafas plásticas de água capturadas sob uma ampla gama de ângulos de iluminação, distâncias e oclusões parciais. Após o treinamento em uma placa gráfica potente, eles comprimiram o modelo em uma forma de 8 bits de "tiny ML" para que coubesse na memória e no poder de processamento limitados do microcontrolador AMB82-Mini. Mesmo nessa versão enxuta, o modelo atingiu cerca de 88% de precisão na identificação de garrafas e rodou rápido o bastante — cerca de 7–8 quadros por segundo — para trabalho de pick-and-place em tempo real diretamente no microcontrolador, sem ajuda de um PC ou da nuvem.
Dos pixels ao movimento preciso
Uma vez que a câmera detecta uma garrafa, o sistema calcula o centro da caixa de detecção na imagem e estima a distância do objeto com base no tamanho aparente em pixels. Isso gera coordenadas x, y e z no espaço. Um solucionador matemático personalizado então traduz essas coordenadas nos seis ângulos das juntas que o braço deve alcançar, usando geometria robótica padrão, mas otimizada para rodar rapidamente no processador diminuto. O software de controle, organizado como uma máquina de estados simples, percorre os passos de encontrar um objeto, mover-se até ele, fechar a garra usando o sensor de corrente como sensação tátil e então transportar o objeto até um ponto fixo de depósito. Para manter os movimentos suaves e evitar tremores, a equipe usa curvas de “easing” cuidadosamente moldadas e um método especial de modulação de tensão que reduz o tremor dos motores e o overshoot.
Testes no mundo real e o que eles mostram
Em experimentos repetidos, o sistema integrado demonstrou que podia agarrar e posicionar com confiabilidade garrafas plásticas de até 300 gramas com taxa de sucesso de 100%, e ainda se sair bem com cargas maiores, até 500 gramas. Simulações e medições mostraram que os erros de posicionamento tipicamente ficaram em torno de um milímetro — suficiente para muitas tarefas de triagem e embalagem. Em comparação com esquemas de controle mais básicos, a estratégia de controle de motor dos autores reduziu vibrações, encurtou o tempo que o braço leva para estabilizar e eliminou movimentos bruscos. Embora os testes tenham se concentrado em um tipo de objeto e distâncias fixas em condições internas controladas, eles fornecem evidências convincentes de que percepção e controle robótico de nível sério podem ser integrados em uma única placa embarcada muito modesta.
O que isso significa para a automação cotidiana
Para não-especialistas, a principal conclusão é que habilidades avançadas de “ver” e “mover” não estão mais limitadas a robôs caros e de alta potência. Ao combinar modelos de machine learning compactos, geometria inteligente e controle cuidadoso dos motores em um microcontrolador de baixo custo, este trabalho mostra um caminho para braços robóticos compactos e autocontidos que pequenos fabricantes, escolas e entusiastas poderiam adotar realisticamente. À medida que versões futuras se expandirem para mais tipos de objetos e ambientes mais variados, sistemas embarcados semelhantes poderão automatizar discretamente inúmeras tarefas simples de pick-and-place, tornando a robótica inteligente acessível a muito mais pessoas e lugares.
Citação: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Palavras-chave: robótica embarcada, tiny machine learning, controle de braço robótico, detecção de objetos, automação industrial