Clear Sky Science · pt
Um novo esquema de controle neuro‑fuzzy adaptativo e proporcional ressonante adaptativo para aplicações de veículos elétricos com PMSM
Viagens elétricas mais silenciosas e suaves
Carros elétricos já são mais limpos que veículos a gasolina, mas a forma como seus motores são controlados ainda permite melhorias. Solavancos repentinos quando você pisa no acelerador, um zumbido fraco do motor e energia desperdiçada têm origem em quão rápida e suave a unidade motriz responde às mudanças nas condições de estrada e de tráfego. Este artigo explora uma nova maneira de “conduzir” o motor internamente — usando uma mistura de inteligência artificial e um tipo especial de modelagem de sinal — para fazer os veículos elétricos acelerarem de forma mais suave, desperdiçarem menos energia e lidar melhor com perturbações do mundo real.
Por que o controle do motor importa em estradas reais
Motores de ímã permanente são comuns em carros elétricos modernos porque são compactos, eficientes e produzem bom torque a partir da imobilidade. Mas dirigir na cidade é imprevisível: motoristas param e saem em semáforos, desviam em congestionamentos e enfrentam subidas e cargas variáveis. Nesses cenários, a velocidade do motor pode ultrapassar ou ficar atrás do que o motorista requisitou, e o torque no eixo pode apresentar ondulações. Essas ondulações aparecem como vibração, ruído e esforço adicional em engrenagens e mancais. Circuitos de controle tradicionais, que dependem de ajustes fixos, funcionam bem apenas dentro de um conjunto estreito de condições e têm dificuldade quando a estrada, a temperatura ou a carga do veículo mudam.
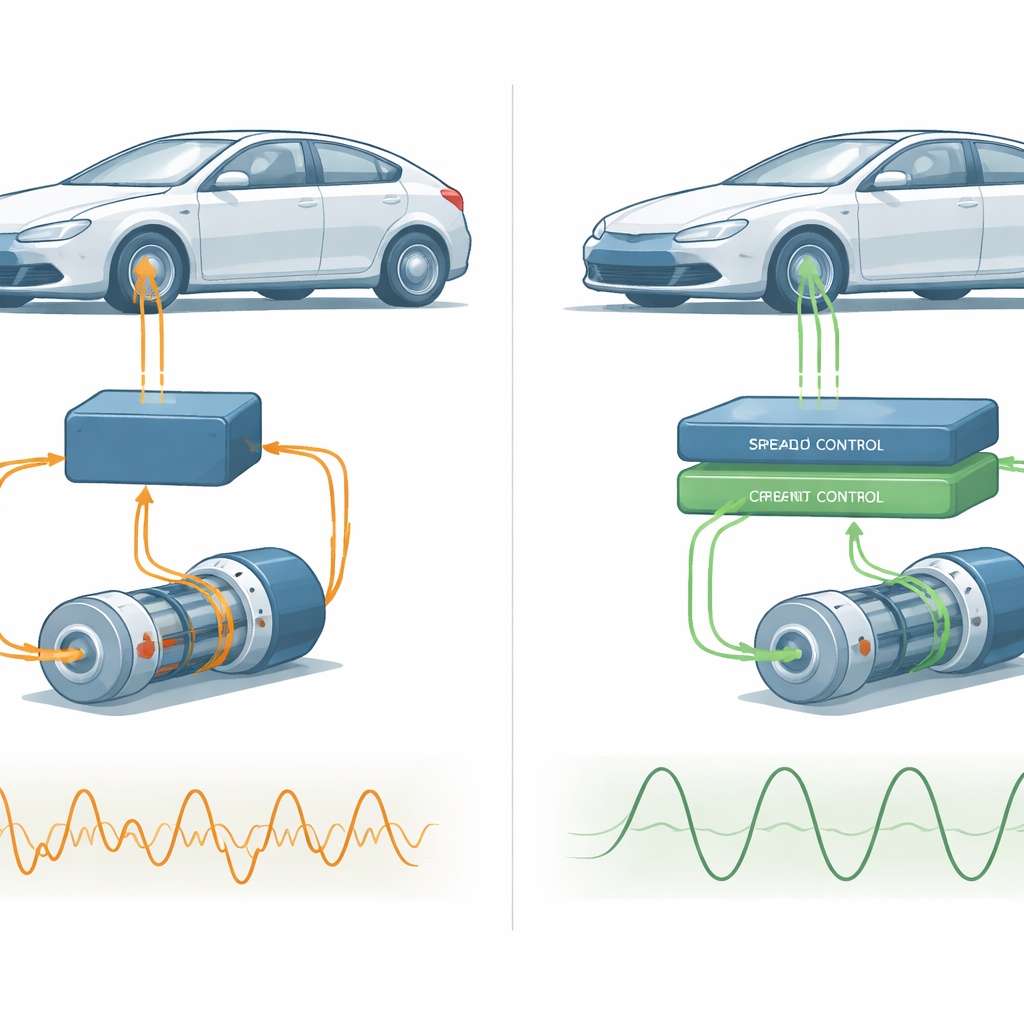
Combinando aprendizado e regras para melhor controle de velocidade
Os autores substituem o habitual bloco externo de controle de velocidade por um sistema neuro‑fuzzy adaptativo — um controlador que combina as regras if–then da lógica fuzzy com a capacidade de aprendizado de redes neurais. Em vez de ser ajustado manualmente uma vez na fábrica, esse controlador aprende a partir de dados exemplos como a velocidade do motor responde a comandos e perturbações. Ele traduz o erro de velocidade bruto (o quanto a velocidade real difere da desejada) e a taxa de variação desse erro em um conjunto de “opiniões” sobrepostas, e então as mistura em uma correção precisa. Resultados de treinamento e teste mostram que esse controlador aprendido encontra rapidamente parâmetros que reduzem sobressinal e subtensão, encurtam o tempo para atingir a velocidade alvo e mantêm o comportamento estável mesmo quando o sistema é não linear e sujeito a mudanças.
Modelando a corrente para operação calma e de baixo ruído
Enquanto a malha externa decide quão rápido o motor deve girar, a malha interna decide quanta corrente elétrica flui nas bobinas em cada instante. Aqui, os autores introduzem um controlador proporcional ressonante adaptativo. Em vez de reagir apenas ao tamanho do erro, esse controlador é ajustado para prestar atenção especial às correntes na frequência alternada principal do motor, onde as ondulações indesejadas são mais prejudiciais. Ao escolher cuidadosamente alguns valores de sintonia chave, ele oferece grande poder de correção nessa frequência fundamental enquanto evita instabilidade em outras faixas. O resultado é uma corrente quase senoidal perfeita, com muito menos ondulações acentuadas que, de outra forma, se manifestariam como ondulação de torque e zumbido audível.
Colocando a nova estratégia à prova
A equipe avalia seu projeto em duas camadas — controle de velocidade neuro‑fuzzy na malha externa e controle ressonante de corrente na malha interna — por meio de simulações computacionais detalhadas e experimentos em hardware‑in‑the‑loop que imitam um trem de força de veículo elétrico real. Eles comparam com três métodos estabelecidos: um controlador proporcional–integral convencional, um esquema que emparelha esse controlador com uma malha interna ressonante e uma abordagem preditiva baseada em modelo. Em uma variedade de cenários — partida a partir do repouso, operação contínua sob carga, mudanças rápidas de velocidade em carga constante e variações bruscas de carga em velocidade constante — o novo esquema atinge consistentemente a velocidade alvo mais rápido, com picos e vales menores. Também produz torque mais suave e correntes mais limpas, mesmo quando resistência e indutância do motor são alteradas artificialmente para imitar aquecimento ou ambientes adversos.
O que isso significa para os carros elétricos do futuro
Em termos simples, essa estratégia de controle híbrida permite que um motor elétrico pense e se adapte em vez de seguir cegamente uma receita fixa. Ao aprender a rejeitar distúrbios no nível de velocidade e ao modelar as formas de onda de corrente dentro do motor, a abordagem reduz vibração, ruído e desperdício de energia. Para os motoristas, isso se traduz em aceleração mais suave, cruzeiro mais estável e transmissões que toleram melhor componentes envelhecidos e mudanças climáticas. Embora o método ainda presuma uma frequência de operação fixa em algumas partes, os resultados sugerem que adicionar inteligência e controle sensível à frequência aos acionamentos de motor pode ser um passo-chave rumo a veículos elétricos mais refinados, duráveis e eficientes.
Citação: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Palavras-chave: motores de veículos elétricos, controle neuro fuzzy, motor síncrono de ímã permanente, redução de ondulação de torque, acionamentos de motor avançados