Clear Sky Science · pt
Controle por modo deslizante fuzzy baseado em algoritmo super-twisting para sistemas descriptor T-S fuzzy
Fazendo Sistemas Complexos se Comportarem
De gerenciar populações de peixes a manter redes de energia e circuitos eletrônicos estáveis, muitos sistemas do mundo real exibem comportamentos complexos e não lineares. Engenheiros utilizam algoritmos avançados de controle para manter esses sistemas seguros e eficientes, mesmo quando sujeitos a perturbações e incertezas. Este artigo apresenta uma nova estratégia de controle que doma esses sistemas indisciplinados de forma mais suave, evitando a comutação brusca e rápida que pode danificar equipamentos e degradar o desempenho.
Por que Alguns Sistemas São Difíceis de Controlar
Muitos sistemas práticos são regidos não apenas por equações que descrevem como quantidades mudam ao longo do tempo, mas também por restrições algébricas que devem ser satisfeitas a cada instante. Esses chamados sistemas descriptor aparecem em economia, redes de energia, acoplamentos mecânicos e modelos biológicos. Para lidar com seu comportamento não linear, pesquisadores frequentemente recorrem a modelos fuzzy de Takagi–Sugeno (T-S), que representam um sistema complexo como uma combinação de partes lineares mais simples válidas em diferentes regiões de operação. Apesar de poderosos, esse arcabouço há muito enfrenta um obstáculo técnico: a maioria dos métodos de controle supunha conhecimento prévio sobre como as “funções de pertinência” fuzzy mudam ao longo do tempo, mesmo quando essas mudanças dependem do comportamento futuro desconhecido do sistema e do seu controlador.
Um Tipo de Controle Robusto Mais Suave
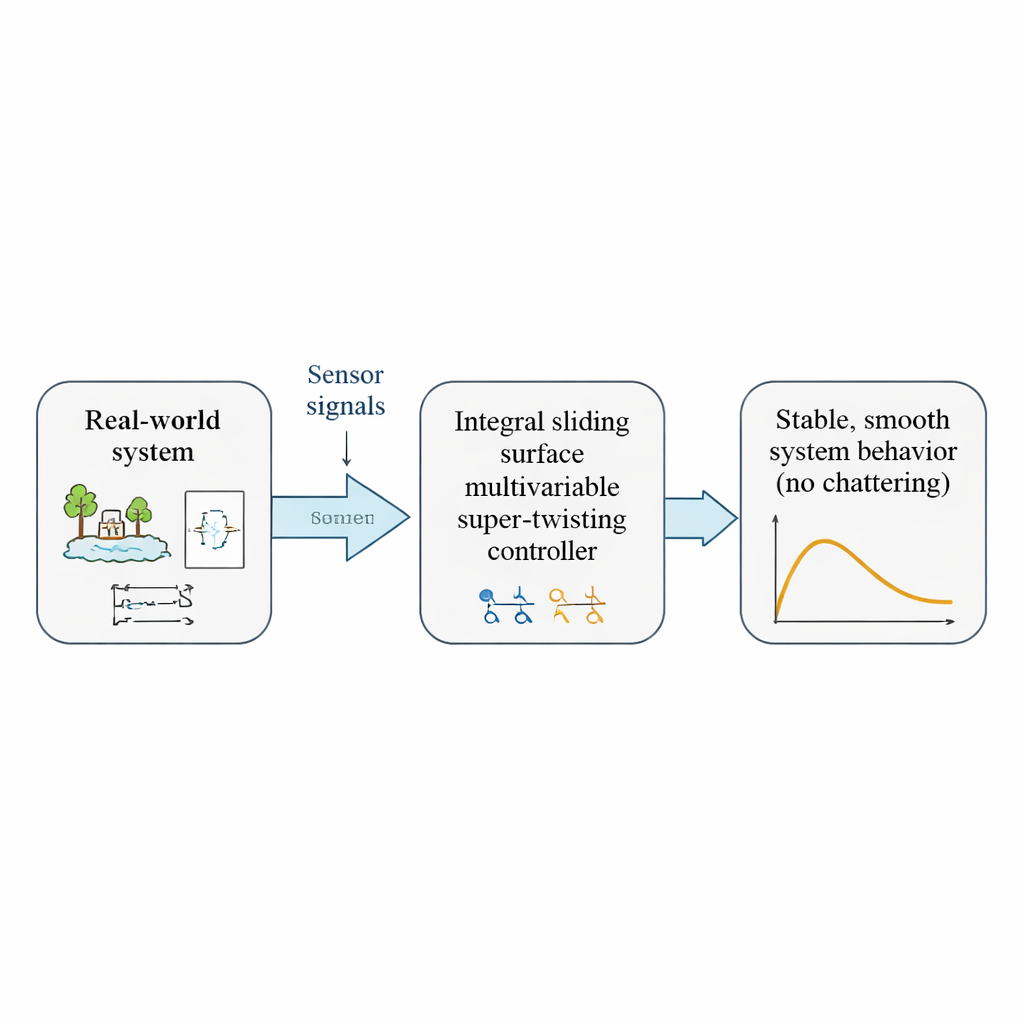
O controle por modo deslizante é um método robusto popular, conhecido por sua capacidade de levar rapidamente um sistema a uma trajetória desejada e mantê‑lo lá apesar de perturbações. Faz isso comutando a entrada de controle de modo a contrariar a incerteza. No entanto, a comutação rápida pode causar “chattering” — oscilações de alta frequência que são indesejáveis ou até prejudiciais em sistemas mecânicos e elétricos. O algoritmo super-twisting, uma forma mais avançada de controle por modo deslizante, esconde a comutação dentro de um processo interno, produzindo um sinal de controle contínuo que mantém a robustez enquanto reduz o chattering. Até agora, essa técnica estava principalmente restrita a sistemas de entrada única ou exigia decompor sistemas multi‑entrada em muitos controladores separados, o que é computacionalmente oneroso.
Uma Superfície de Deslizamento Nova Sem Pressupostos Ocultos
A primeira contribuição-chave dos autores é um novo tipo de superfície de deslizamento “integral” projetada especificamente para sistemas descriptor T-S fuzzy. Em termos simples, essa superfície é uma condição matemática que envolve tanto o comportamento presente quanto o acumulado do passado do sistema. Ao construí‑la de forma inteligente, os autores mostram que podem garantir o movimento desejado uma vez que o sistema esteja sobre essa superfície, sem precisar de limites prévios sobre como as funções de pertinência fuzzy variam. Isso elimina uma suposição restritiva que limitava métodos anteriores. A análise usa funções escolhidas com cuidado, análogas a funções de energia, para provar que o comportamento do sistema sobre a superfície de deslizamento permanece estável ao longo do tempo.
Um Controlador Super-twisting Multivariável
Com base nessa superfície de deslizamento, o artigo desenvolve uma versão multivariável do algoritmo super-twisting. Em vez de projetar um controlador por entrada ou por variável de deslizamento, o método trata todos eles em conjunto numa forma matricial. Isso o torna mais adequado a sistemas onde diferentes estados estão fortemente acoplados, como espécies interagindo em um ecossistema ou correntes e tensões em um circuito. Os autores derivam condições para escolher os ganhos do controlador de modo que os estados do sistema alcancem imediatamente a superfície de deslizamento e então convirjam em tempo finito. Como o sinal de controle é contínuo em vez de comutado bruscamente, o chattering é suprimido por projeto, enquanto a robustez a perturbações é preservada.
Demonstrando a Ideia em Biologia e Eletrônica
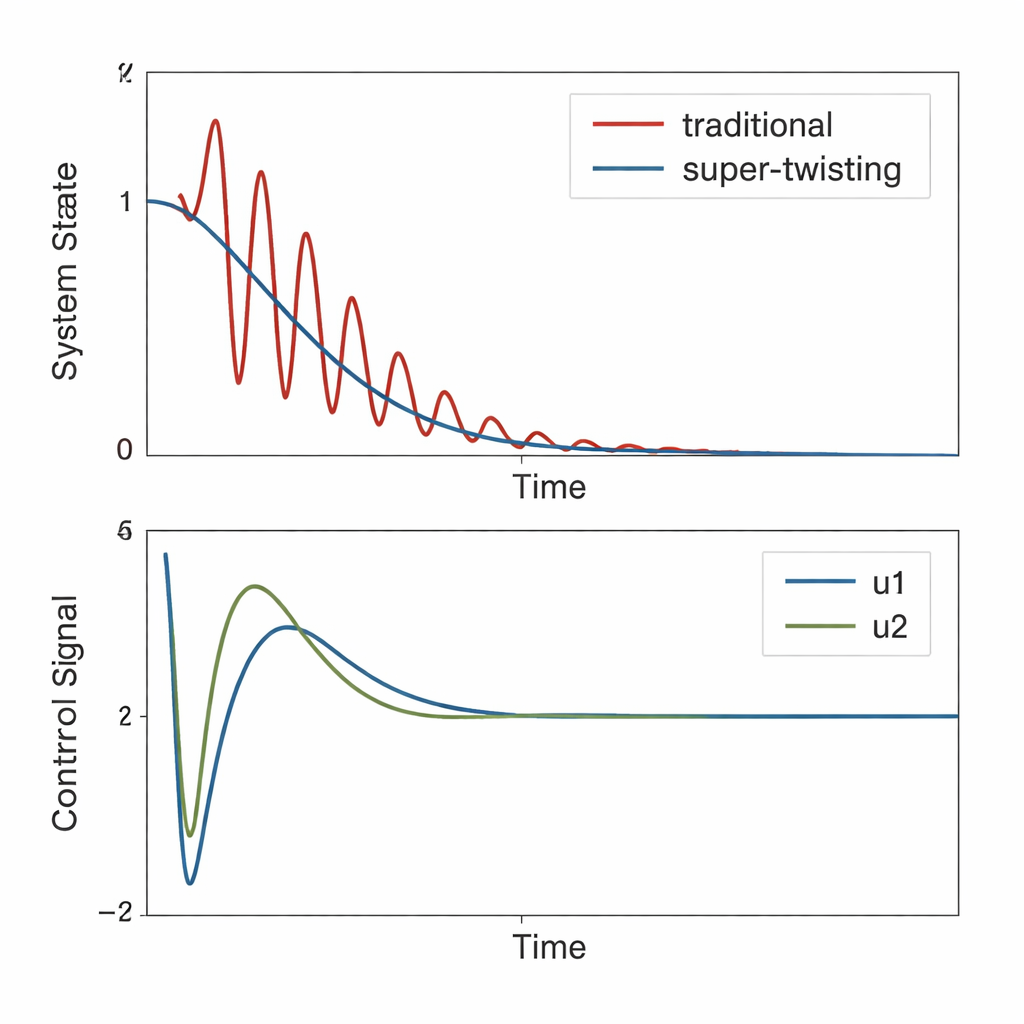
Para demonstrar a aplicabilidade do método, os autores o aplicam a dois sistemas descriptor não lineares distintos. O primeiro modela um cenário bioeconômico envolvendo populações imaturas e maduras de uma espécie, juntamente com uma variável que captura a capacidade reprodutiva e ações de manejo como colheita e regulação. O segundo exemplo é um circuito não linear com diodo túnel, um banco de testes clássico em eletrônica. Em ambos os casos, simulações mostram que o controlador proposto estabiliza rapidamente os estados do sistema e mantém as variáveis de deslizamento próximas de zero, indicando rastreamento preciso do comportamento desejado. Em comparação com controladores tradicionais por modo deslizante, a nova abordagem reduz significativamente as oscilações tanto na resposta do sistema quanto nos sinais de controle.
O Que Isso Significa na Prática
Para não especialistas, a mensagem principal é que este trabalho oferece uma maneira de manter sistemas complexos, constrangidos e incertos sob controle sem a comutação violenta que prejudicou alguns métodos robustos. Ao combinar modelagem fuzzy, uma superfície de deslizamento integral e um algoritmo super-twisting multivariável, os autores projetam controladores que são ao mesmo tempo garantidos matematicamente quanto à estabilidade e mais suaves na operação prática. Isso pode beneficiar aplicações que vão do manejo de recursos ecológicos à eletrônica de potência avançada e sistemas de controle em rede, especialmente à medida que trabalhos futuros estendam essas ideias para cenários ciberseguros onde a comunicação pode ser interrompida por ataques.
Citação: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Palavras-chave: controle por modo deslizante, sistemas fuzzy, controle robusto, dinâmica não linear, algoritmo super-twisting