Clear Sky Science · pt
Controlador adaptativo de referência de modelo robusto para manipulador planar de 3 GL
Braços robóticos mais inteligentes para tarefas mais duras
Os braços robóticos de fábrica são incrivelmente rápidos e precisos, mas seu desempenho pode cair sempre que o mundo real não colabora — cargas mudam, peças são posicionadas de forma ligeiramente diferente ou forças inesperadas sacodem o braço. Este artigo explora uma nova maneira de manter um braço robótico comum de três articulações preciso e estável mesmo quando seu comportamento é difícil de modelar com exatidão e quando há perturbações intensas, tornando os robôs parceiros mais confiáveis no chão de fábrica.
Por que três articulações importam em fábricas reais
O estudo foca em um robô planar de três elos: três segmentos rígidos conectados por juntas rotativas e movendo-se em um plano. Apesar da simplicidade, essa configuração é a espinha dorsal de muitas tarefas industriais de pick-and-place, linhas de embalagem e sistemas de montagem. O desafio é que o movimento de uma junta afeta fortemente as outras, e as equações que descrevem o movimento do braço são altamente não lineares e fortemente acopladas. Controladores tradicionais podem funcionar bem quando tudo é conhecido e previsível, mas sofrem quando a carga do robô muda, quando atrito ou massa não são modelados com precisão, ou quando perturbações externas desviam o braço do trajeto.
Dividindo um movimento complexo em partes mais simples
Para domar essa complexidade, os autores primeiramente derivam um modelo matemático detalhado do movimento do robô, incluindo como massas dos elos, ângulos das juntas e gravidade se combinam para produzir movimento. Em seguida, introduzem uma simplificação chave: uma estratégia de “desacoplamento”. Em vez de tratar o robô como um sistema entrelaçado de três juntas, cada junta é modelada como se sua aceleração dependesse principalmente do seu próprio torque de motor e velocidade. Os efeitos remanescentes — como interações entre juntas, termos gravitacionais e outras influências difíceis de modelar — são agrupados e tratados como incertezas. Esse desacoplamento permite que o problema de controle seja dividido em três subsistemas menores e mais gerenciáveis, um por junta, ao mesmo tempo em que reconhece que o sistema real é complexo por baixo. 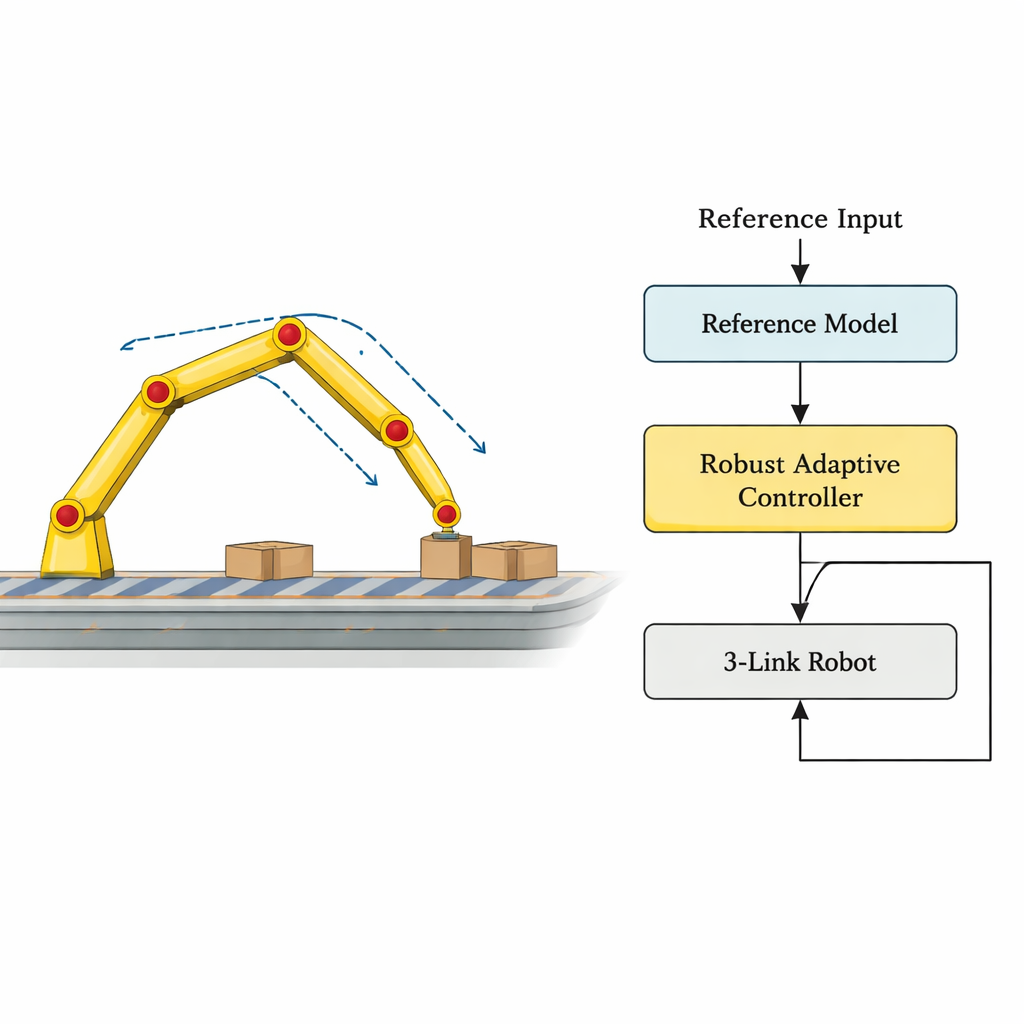
Ensinando o robô a seguir um alvo em movimento
Sobre esse modelo simplificado, os autores constroem um controlador adaptativo de referência de modelo (MRAC). Em termos simples, eles definem primeiro uma resposta ideal — um modelo de referência que indica como cada junta deve se mover ao longo do tempo quando recebe um comando. O controlador compara continuamente o movimento real do robô com esse ideal e ajusta seus ganhos internos em tempo real para reduzir a diferença. Em condições perfeitas, o MRAC convencional pode fazer o robô seguir de perto a referência, mas tem uma fraqueza séria: na presença de perturbações persistentes ou erros de modelagem, os ganhos adaptativos podem derivar para valores extremos, provocando oscilações, consumo de energia desnecessário e até perda de estabilidade. Esse fenômeno, chamado deriva de parâmetros, torna o MRAC simples arriscado para uso industrial real.
Tornando a adaptação robusta, não imprudente
Para evitar essa deriva, o artigo desenvolve várias variantes “robustas” do MRAC que explicitamente consideram efeitos desconhecidos. Os autores adicionam termos extras às leis de adaptação que puxam suavemente os ganhos do controlador de volta a limites seguros ou escalonam o esforço de adaptação com base na magnitude do erro de rastreamento. Entre as estratégias testadas — conhecidas como sigma-modification, error-modification e uma modificação de controle ótimo consciente da energia — esta última sobressai. Por meio de extensas simulações computacionais, incluindo trajetórias oscilatórias rápidas, movimentos de pick-and-place, variações de massa de 50%, adição súbita de carga e fortes perturbações de alta frequência, o MRAC robusto mantém o erro de rastreamento pequeno e os sinais de controle suaves. Em cenários onde os ganhos internos do MRAC convencional crescem sem limite, as versões robustas os mantêm comportados e o movimento do braço estável. 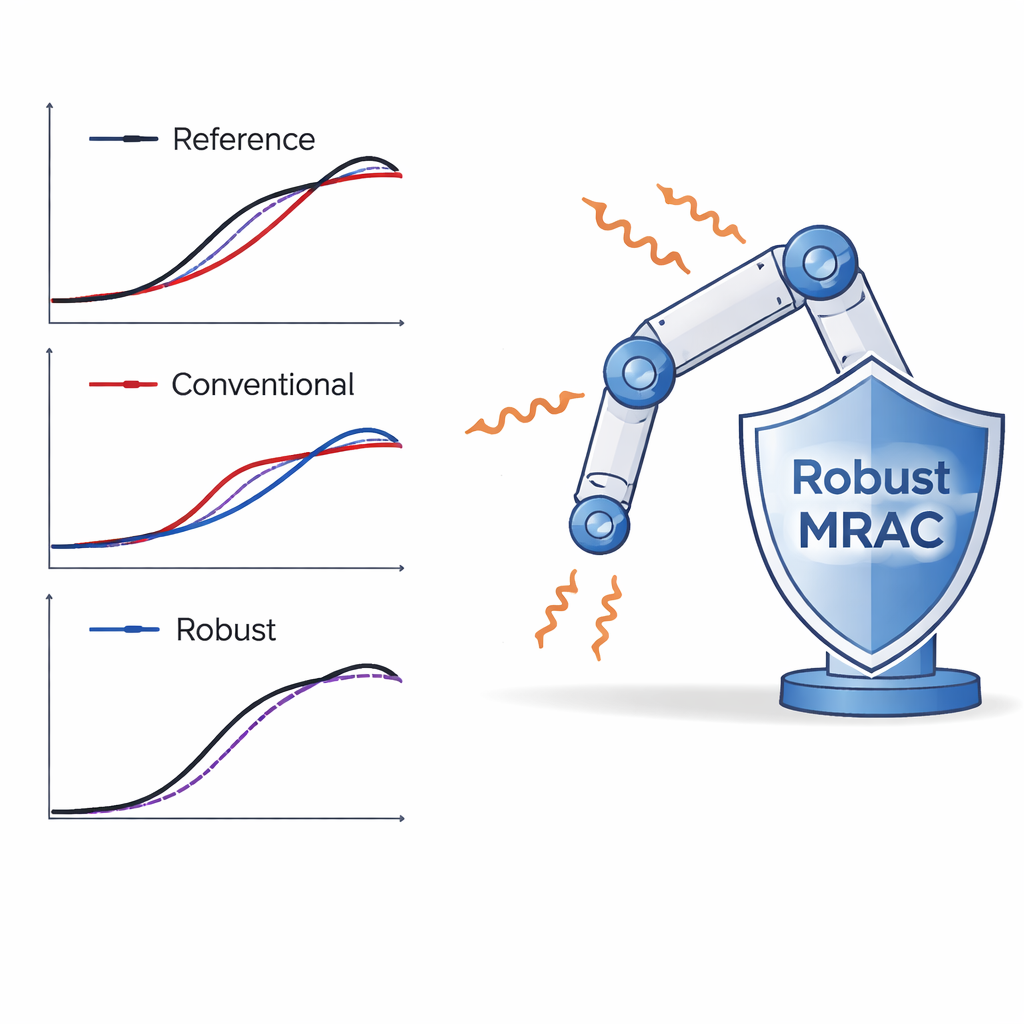
O que isso significa para robôs do mundo real
Para um leitor leigo, a conclusão é que este trabalho oferece um “piloto automático” mais inteligente para braços robóticos industriais — que continua aprendendo e se adaptando, mas sem se tornar instável quando o ambiente ou a carga mudam. Ao dividir a dinâmica complexa de três juntas em partes mais simples e adicionar salvaguardas ao processo de aprendizagem, o controlador adaptativo robusto proposto permite que o robô siga trajetórias desejadas com precisão usando esforço de motor razoável, mesmo sob perturbações e incerteza. Isso aproxima a robótica prática de sistemas verdadeiramente plug-and-play que podem ser reconfigurados rapidamente, lidar com condições inesperadas e operar em segurança ao lado de humanos sem ajuste constante por especialistas.
Citação: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Palavras-chave: controle de manipulador robótico, controle adaptativo, robótica industrial, rastreamento de trajetória, controle robusto