Clear Sky Science · pt
Localização do ponto de crescimento de plantas via annealing de priori baseado em épocas
Capina mais inteligente para um mundo faminto
À medida que a população global cresce, os agricultores enfrentam a necessidade de produzir mais alimentos usando menos produtos químicos e protegendo o meio ambiente. Um grande desafio é eliminar as ervas daninhas sem prejudicar as culturas valiosas. Este artigo apresenta uma nova estratégia de treinamento em inteligência artificial (IA) que ajuda máquinas a localizar exatamente onde as plantas crescem — seus pontos de crescimento — para que ferramentas como capinadores a laser ou elétricos possam mirar nas ervas com precisão cirúrgica e poupar as culturas.
Por que os pontos de crescimento importam
Ervas daninhas roubam luz solar, água e nutrientes das culturas, reduzindo a produtividade e ameaçando a segurança alimentar. Os agricultores costumam recorrer a herbicidas, mas o uso excessivo levanta preocupações sobre saúde, poluição e resistência das plantas daninhas. Novas técnicas, como capina por chama, elétrica e a laser, prometem controle mais limpo ao destruir plantas mecanicamente ou com feixes de energia. Para operar com segurança, esses sistemas devem distinguir culturas de ervas daninhas e então localizar os pequenos pontos de crescimento — frequentemente em junções de caule — onde o dano é mais eficaz. Muitas ferramentas de visão computacional existentes detectam plantas inteiras, mas têm dificuldade em encontrar esses alvos pequenos com precisão e rapidez suficientes para uso em tempo real no campo.
Transformando pistas simples de cor em orientação poderosa
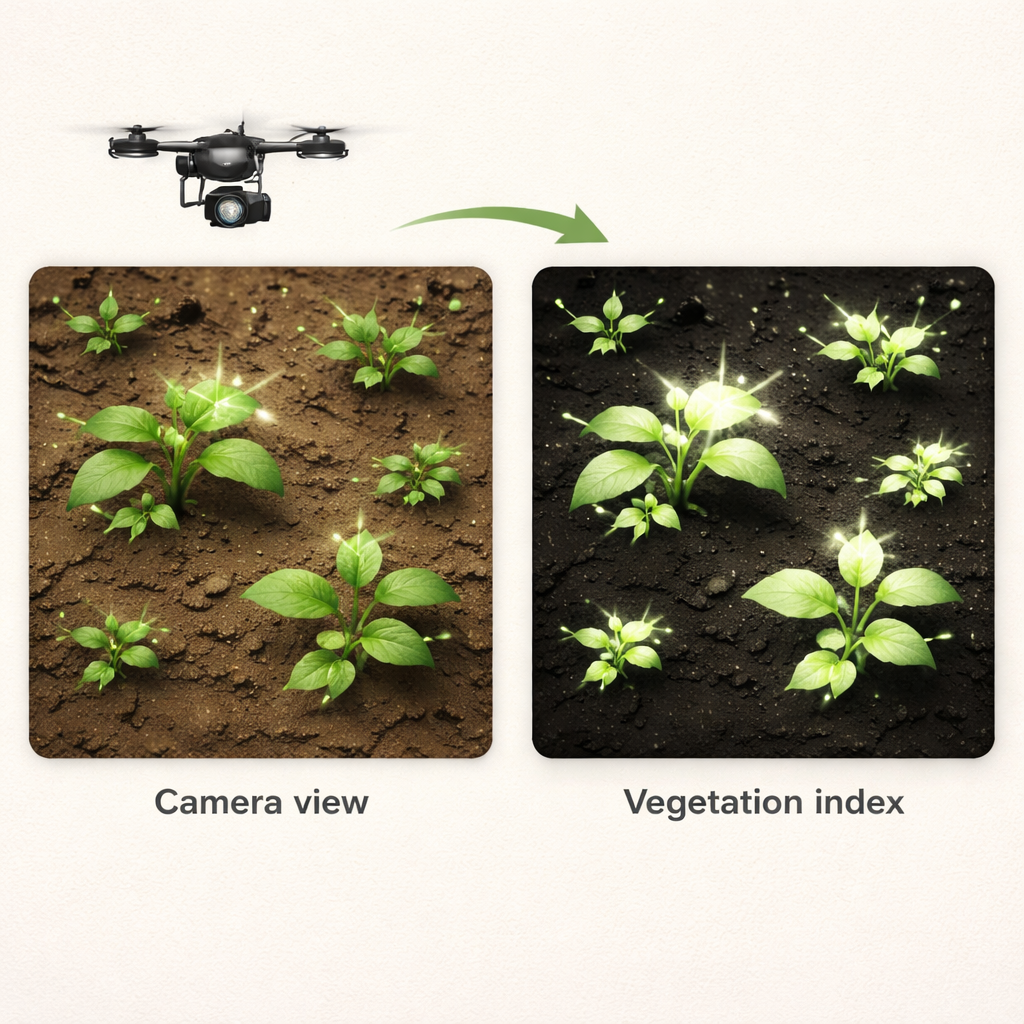
Os pesquisadores partem de uma ideia simples: plantas verdes parecem diferentes do solo marrom em fotos coloridas comuns. Uma fórmula de cor bem conhecida, chamada índice de vegetação ExG-ExR, combina os valores vermelho, verde e azul de cada pixel para que os pixels de planta se destaquem como claros e os do solo apareçam escuros. Esse índice pode ser calculado a partir de qualquer câmera padrão, sem sensores extras. No novo sistema, esse índice de vegetação é adicionado aos três canais de cor habituais como uma quarta entrada para um detector de IA popular conhecido como YOLO-Pose. Essa visão de quatro canais dá ao modelo uma imagem mais nítida de onde as plantas estão, ajudando-o a concentrar-se nas áreas certas ao procurar os pontos de crescimento.
Ensinando a IA do fácil para o difícil
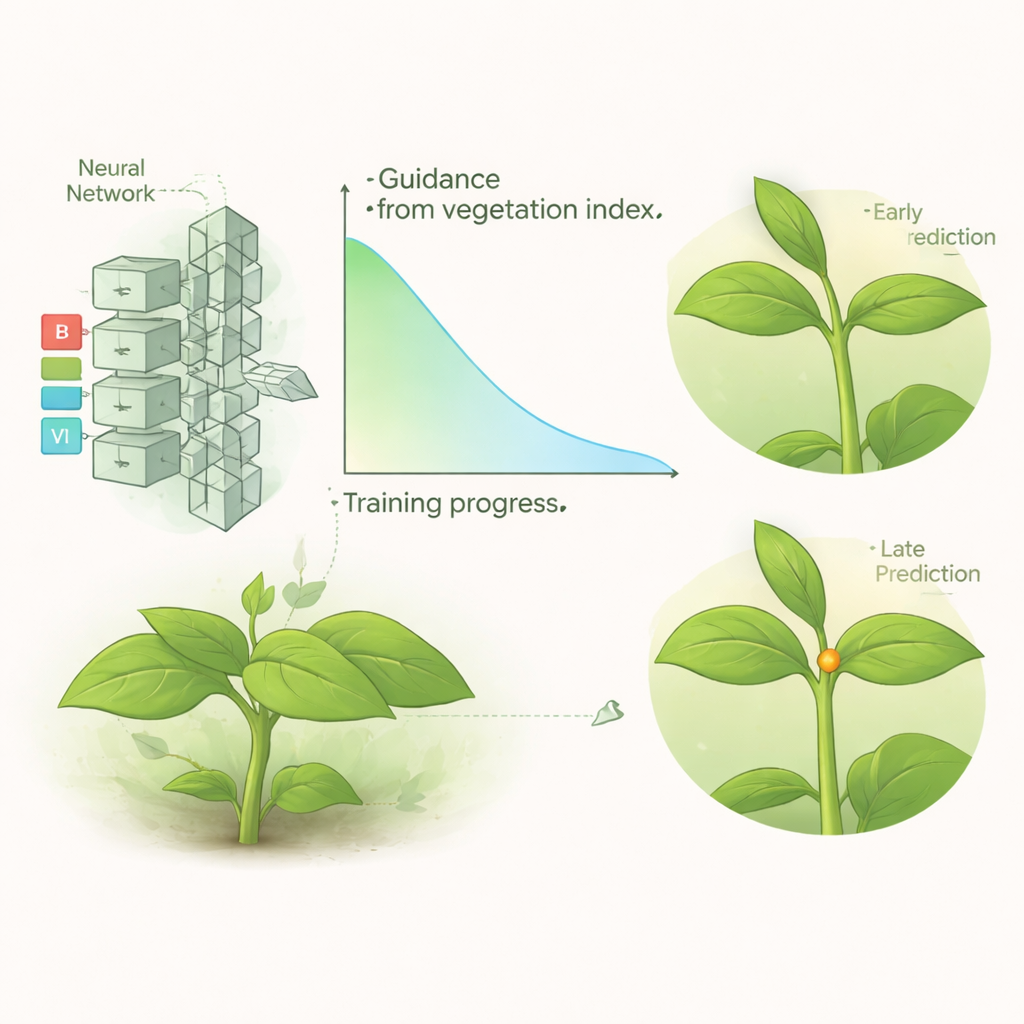
Fornecer informação extra não é suficiente; o modelo também precisa aprender a usá-la. A equipe introduz uma estratégia chamada "annealing de priori baseado em épocas" (EPA), inspirada em como os humanos aprendem. No início do treinamento, o modelo é fortemente encorajado a manter seus pontos de crescimento previstos dentro das regiões vegetais, usando o índice de vegetação como guia. Se posicionar um ponto no solo, o algoritmo de treinamento impõe uma penalidade maior; se o ponto estiver dentro de pixels de planta, a penalidade é menor. À medida que o treinamento progride, essa orientação é gradualmente reduzida segundo um cronograma suave, permitindo que o modelo dependa menos da pista de cor grosseira e mais dos padrões visuais finos que aprendeu. Ao final, a IA não é mais forçada a apontar para os pixels mais verdes, que podem não ser os verdadeiros pontos de crescimento, mas sim ajusta suas localizações com maior precisão por conta própria.
Comprovando a ideia em campos reais
Para testar a abordagem, os autores treinaram modelos em dois conjuntos de dados do mundo real contendo milhares de imagens de campo com múltiplas espécies de culturas e muitos tipos de ervas daninhas. Eles compararam versões do modelo YOLO-Pose com e sem o canal extra de vegetação e com e sem a estratégia EPA. Adicionar apenas o índice de vegetação trouxe ganhos modestos, mas combiná-lo com a EPA levou a melhorias claras na precisão da localização dos pontos de crescimento — cerca de 2,4 pontos percentuais em uma métrica padrão de detecção — sem prejudicar a capacidade do modelo de desenhar caixas ao redor das plantas inteiras. O custo computacional extra foi ínfimo (menos de meio por cento do custo total), tornando o método adequado para robôs agrícolas com recursos limitados. Testes em diferentes condições de iluminação, níveis de umidade do solo e até em diferentes versões do modelo YOLO mostraram que a estratégia é amplamente útil, embora um pouco sensível à intensidade e à duração da aplicação da orientação prévia.
O que isso significa para a agricultura do futuro
Para não especialistas, a conclusão principal é que um pequeno ajuste na forma como treinamos a IA — usando inicialmente uma pista simples baseada em cor e depois deixando o modelo decidir por si mesmo — pode tornar as máquinas muito melhores em encontrar os pontos exatos nas plantas onde a ação importa. Essa melhoria na localização de pontos de crescimento pode ajudar futuros robôs de capina a direcionar pulsos elétricos ou feixes laser precisamente nas ervas daninhas, poupando as culturas, reduzindo o uso de herbicidas e o impacto ambiental. A mesma estratégia pode ser adaptada a outros tipos de sinais vegetais e modelos de IA, abrindo caminho para sistemas de visão mais inteligentes e confiáveis que apoiem uma agricultura sustentável e de alta precisão.
Citação: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
Palavras-chave: agricultura de precisão, controle de ervas daninhas, visão computacional, aprendizado profundo, pontos de crescimento de plantas