Clear Sky Science · pt
Um método de calibração extrínseca LiDAR–câmera de longo alcance para trens
Protegendo trens à distância
Trens modernos sem condutor dependem de “olhos” eletrônicos para vigiar os trilhos em busca de obstáculos muito antes de um ser humano poder percebê‑los. Dois dos sensores mais importantes são câmeras e scanners a laser chamados LiDARs, que capturam o mundo de formas diferentes. Para trabalhar em conjunto, eles precisam ser alinhados com grande precisão — uma tarefa que se torna surpreendentemente difícil ao monitorar trilhos a centenas de metros. Este estudo apresenta uma nova forma de alinhar esses sensores para que possam proteger com confiança os sistemas ferroviários a longo alcance.
Por que o alinhamento dos sensores importa
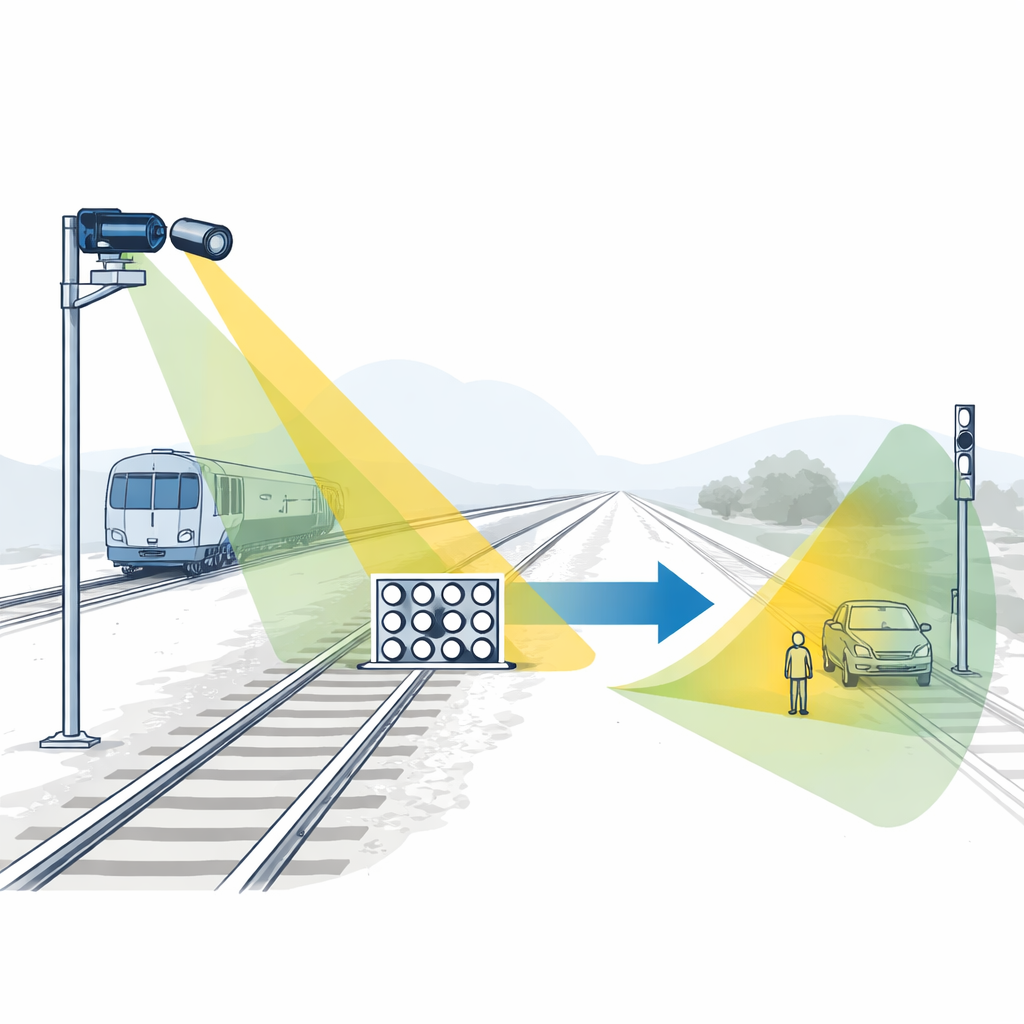
Em um trem autônomo, as câmeras geram imagens coloridas detalhadas enquanto o LiDAR mede distâncias ao emitir pulsos de luz e cronometrar seu retorno. A fusão dessas duas visões permite ao sistema detectar e rastrear objetos que possam invadir a área dos trilhos, desde um carro parado em um cruzamento até detritos sobre os trilhos. Mas a fusão só funciona se o sistema souber exatamente como a câmera e o LiDAR estão posicionados um em relação ao outro. Um pequeno desalinhamento pode deslocar um obstáculo detectado por muitos centímetros — ou até metros — a longas distâncias, o que pode tornar os sistemas de proteção automática mais lentos ou menos confiáveis.
O desafio de ver longe pelos trilhos
Para aplicações ferroviárias, engenheiros costumam usar lentes teleobjetiva para que a câmera enxergue claramente objetos a centenas de metros. Nessas distâncias, entretanto, os retornos do LiDAR de qualquer alvo de calibração ficam muito esparsos: apenas alguns pontos a laser atingem a placa usada para alinhar os sensores. A maioria das técnicas de alinhamento existentes pressupõe uma nuvem densa de pontos LiDAR ou arestas ricas na cena — condições que simplesmente não se sustentam em longo alcance. Como resultado, torna‑se difícil encontrar correspondências entre a imagem 2D e a nuvem de pontos 3D com precisão suficiente para suportar controle seguro do trem.
Uma placa de calibração mais inteligente
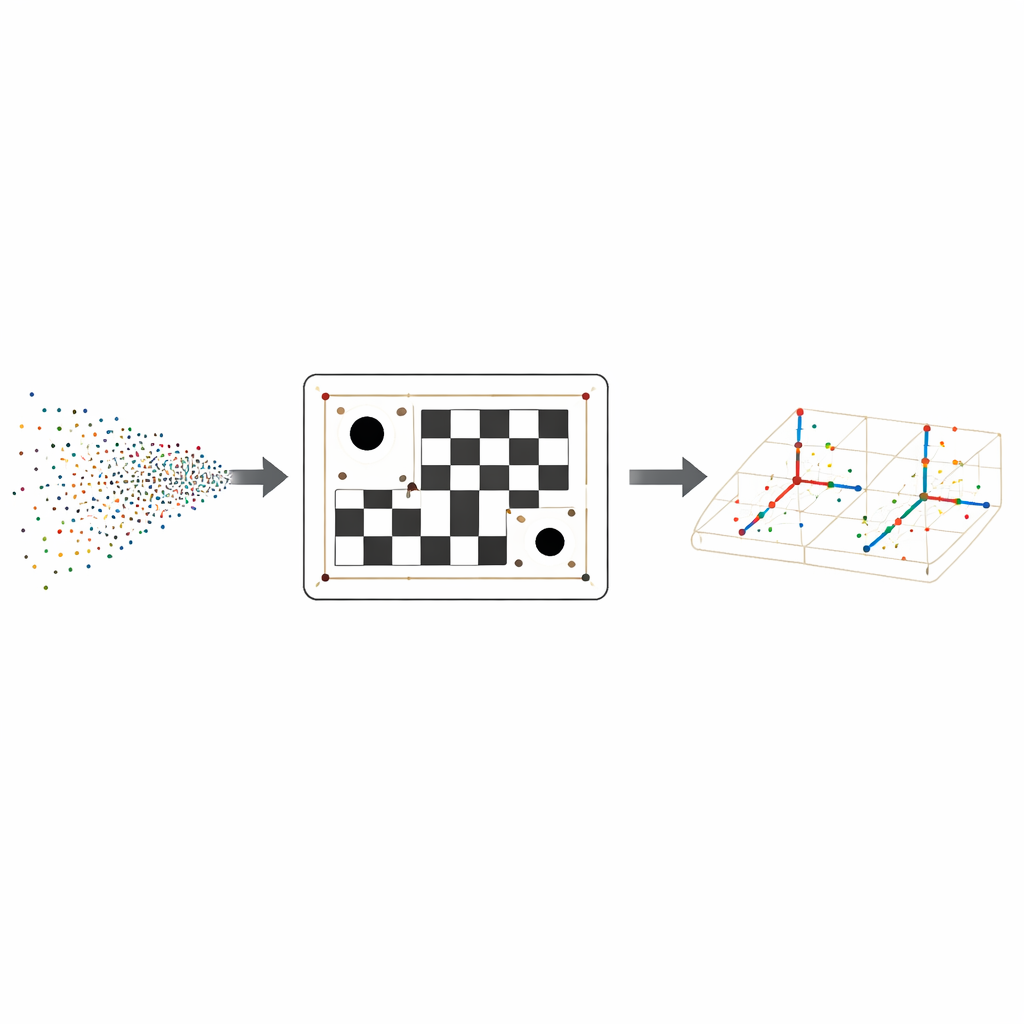
Para superar isso, os autores projetam uma placa de calibração especial que combina um conhecido padrão quadriculado preto e branco com três furos circulares cujos centros formam um triângulo irregular. O padrão quadriculado fornece muitos cantos precisos na imagem da câmera, enquanto os furos criam pistas geométricas fortes para o LiDAR, que pode detectar facilmente suas bordas arredondadas mesmo a longa distância. Como os três furos são dispostos em um triângulo assimétrico, a orientação da placa no espaço pode ser determinada sem ambiguidade, evitando confusões por vistas espelhadas ou rotacionadas.
Transformando pontos esparsos em correspondências confiáveis
No lado do LiDAR, o método primeiro limpa a nuvem de pontos e ajusta um plano que representa a placa. Em seguida, projeta os pontos nesse plano e usa um procedimento robusto de ajuste de círculo para encontrar o centro de cada furo, refinando suas posições ao impor as distâncias físicas conhecidas entre os furos. Com o triângulo dos centros dos furos estabelecido, o algoritmo constrói uma grade local de coordenadas pela placa, prevê onde cada canto do quadriculado deve estar em 3D e verifica pontos LiDAR próximos quanto aos valores corretos de brilho, ou refletividade. Essa combinação de geometria e refletividade transforma um punhado de retornos dispersos em um conjunto confiável de locais 3D de cantos que correspondem aos cantos 2D da câmera.
Afinando a relação entre os sensores
Uma vez identificados os mesmos cantos físicos tanto na imagem da câmera quanto na nuvem LiDAR, os autores calculam a rotação e a translação exatas que ligam os dois sensores. Eles usam uma técnica iterativa de otimização que ajusta repetidamente essa relação para reduzir a discrepância entre onde os pontos LiDAR se projetam na imagem e onde a câmera realmente vê os cantos. Testes em uma plataforma ferroviária real, usando diferentes lentes de câmera de teleobjetiva moderada a forte, mostram que o novo método mantém consistentemente erros de projeção em torno de um pixel ou menos, e supera várias alternativas bem conhecidas, especialmente nas maiores distâncias focais onde os dados são mais escassos.
O que isso significa para a segurança ferroviária
Em termos práticos, o estudo oferece uma forma mais confiável de dizer à câmera e ao LiDAR de um trem autônomo: “você está aqui e olhando exatamente nesta direção”. Ao redesenhar a placa de calibração e adicionar um processamento inteligente dos dados LiDAR esparsos, o método mantém alta precisão mesmo quando os sensores observam cenas a centenas de metros. Esse alinhamento mais rígido permite que o sistema fundido localize obstáculos com maior precisão no espaço 3D, fortalecendo a base tecnológica para um transporte ferroviário mais seguro e uma percepção multi‑sensor mais confiável no mundo real.
Citação: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Palavras-chave: segurança em transporte ferroviário, fusão LiDAR e câmera, calibração de sensores, trens autônomos, percepção de longo alcance