Clear Sky Science · pt
Reconstrução 3D de estruturas em mar raso usando calibração direta do sistema e extração de linha laser fraca
Trazendo mundos subaquáticos ocultos à vista
Muitos dos vestígios mais intrigantes do nosso passado agora repousam debaixo d’água — naufrágios, cidades alagadas e ruínas costeiras. Para explorar e preservar digitalmente esses sítios, os pesquisadores precisam de mapas 3D precisos do que está no leito marinho. Porém, em águas rasas, a luz solar intensa, a areia em suspensão e a própria água tornam medições precisas surpreendentemente difíceis. Este artigo apresenta uma nova forma de escanear e reconstruir modelos 3D detalhados de estruturas subaquáticas usando um laser azul de baixa potência, mesmo em condições iluminadas e ruidosas em que métodos existentes geralmente falham.
Por que escanear mares rasos é tão difícil
Criar um modelo digital 3D de uma cena normalmente significa montar milhões de pontos no espaço — o que os cientistas chamam de nuvem de pontos. Em terra, lasers e câmeras fazem isso de forma confiável. Debaixo d’água, contudo, as coisas ficam complicadas. A água dobra e espalha a luz, tingindo as cenas de um véu azul-esverdeado e borrando contornos. A luz do sol atravessando ondas cria padrões brilhantes em movimento chamados caustas, que podem abafar a linha tênue de um laser de baixa potência. Partículas microscópicas adicionam um véu de névoa e reflexos cintilantes. Como resultado, muitos sistemas subaquáticos atuais só funcionam à noite, com pouca luz ou em condições cuidadosamente controladas — o que não corresponde ao comportamento dos oceanos reais.
Um laser azul giratório como pincel 3D
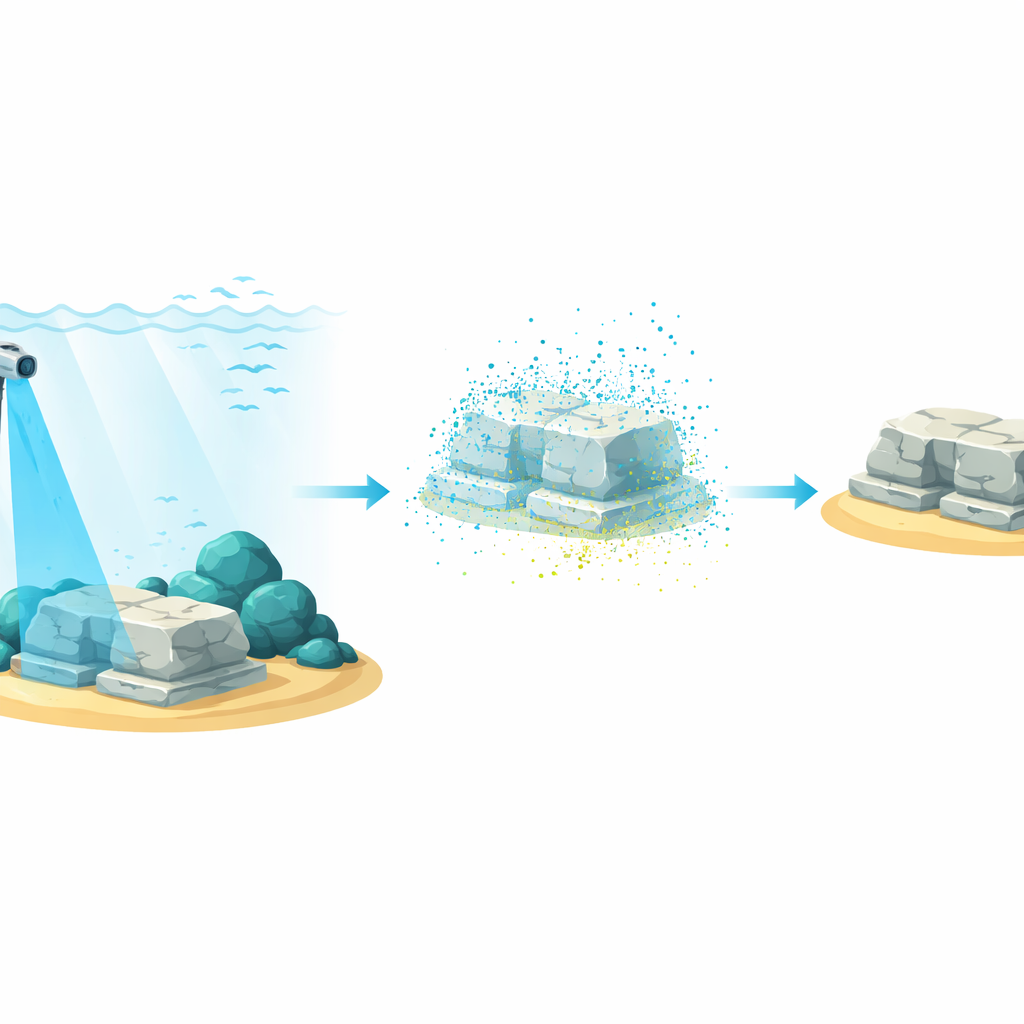
Os autores construíram um scanner compacto e à prova d’água que age como um pincel 3D. Ele projeta uma fina lâmina vertical de luz laser azul que varre à medida que o braço do dispositivo gira lentamente. Onde quer que essa lâmina toque uma rocha, parede ou artefato, ela traça uma curva luminosa. Uma câmera montada ao lado do laser captura imagens a cada pequeno passo de rotação. Ao combinar todas essas visualizações, o sistema pode reconstruir uma nuvem de pontos 3D densa do entorno, completa com cor aproximada, que depois pode ser convertida em uma malha de superfície para visualização ou realidade virtual.
Ensinando o sistema onde cada pixel vive no espaço
Um desafio central nesses sistemas é a calibração: descobrir como cada pixel da câmera se alinha com coordenadas do mundo real. Abordagens tradicionais dependem de modelos matemáticos detalhados da câmera e da água, com dezenas de parâmetros que devem ser ajustados, tornando-as frágeis e propensas a erros. Aqui, os pesquisadores adotam um caminho centrado em dados. Eles aprendem diretamente um mapeamento de pixels da imagem para posições 3D escaneando uma parede coberta por uma grade conhecida. São necessários apenas algumas centenas de pontos de amostra cuidadosamente escolhidos. Uma vez armazenado em uma tabela de consulta, esse mapa permite que o scanner converta qualquer pixel do laser detectado em um ponto 3D sem nunca resolver explicitamente equações complexas da câmera.
Endireitando e amplificando um traço azul fraco
Como a calibração é feita no ar, as filmagens subaquáticas devem primeiro ser “endireitadas” para desfazer a curvatura causada pela refração na superfície da água. A equipe mede essa deformação usando imagens de uma grade que atravessa ar e água e então calcula como cada pixel subaquático se deslocaria se fosse visto no ar. Depois desse desdobramento, começa a verdadeira artimanha: encontrar uma linha azul fraca, frequentemente interrompida, em uma imagem ruidosa. O método primeiro calcula um valor de “azulado” para cada pixel, ajustado para que a luz próxima ao tom azul do laser se destaque. Em seguida, avalia o quanto cada pixel é mais azulado que seus vizinhos e usa um classificador de aprendizado de máquina para formar um mapa preliminar em preto e branco dos pixels prováveis do laser.
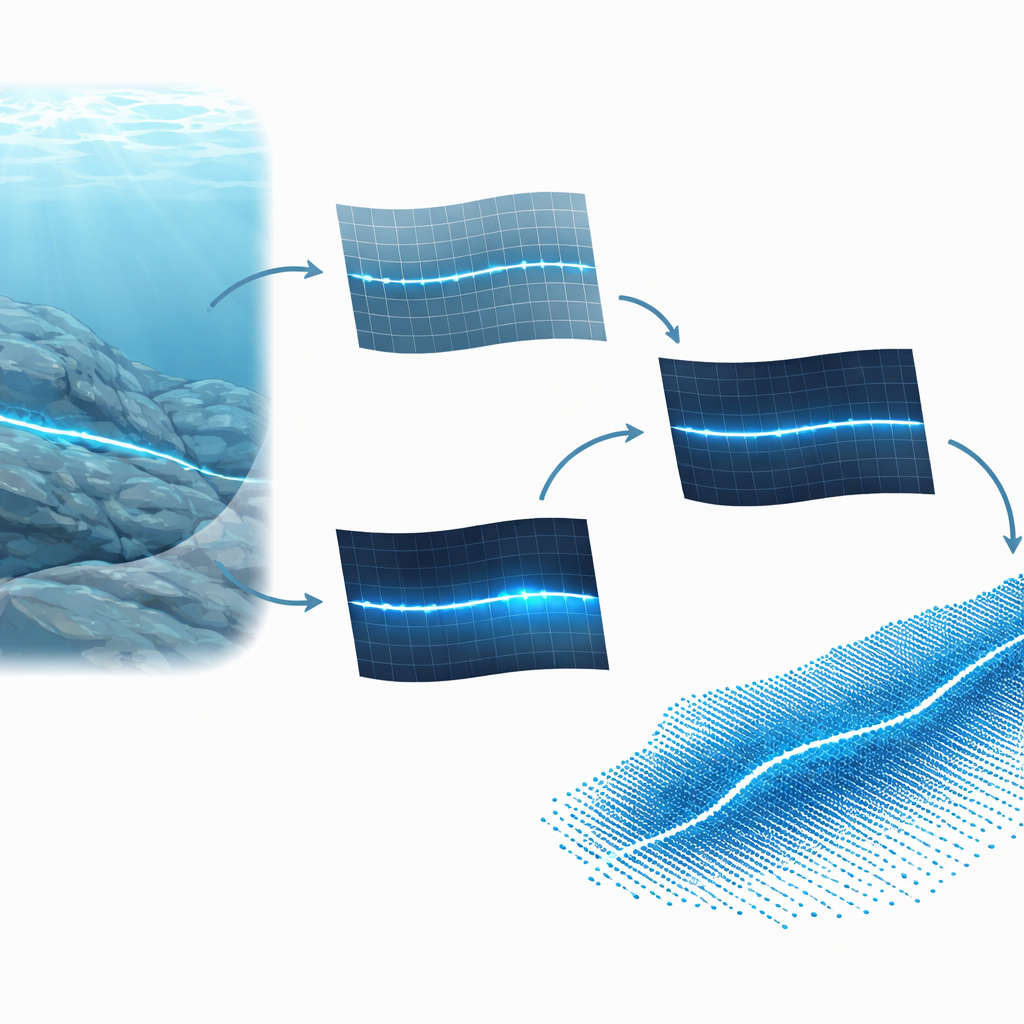
De pontos ruidosos a formas 3D limpas
Aquele primeiro mapa ainda contém muitos falsos positivos vindos da areia, reflexos e caustas. Para limpá-lo, o sistema procura padrões de linhas retas usando uma técnica clássica que vota em possíveis linhas com base nas posições dos pixels. Mantém apenas as linhas que correspondem à orientação esperada do laser. Uma curva suave é então ajustada através dos pontos remanescentes, e a “confiança” de cada pixel é aumentada se ele ficar próximo a essa curva e apresentar forte azulado. Para cada linha da imagem, o pixel com maior confiança é escolhido como parte do traço final do laser. Alimentar esses traços limpos, passo a passo, na tabela de calibração produz uma nuvem de pontos 3D colorida a partir da imagem original da câmera.
Quão bem isso funciona em água real?
Os autores testaram seu sistema em tanques e em um mar raso a cerca de cinco metros de profundidade, sob iluminação que variou de níveis internos tênues até sol intenso ao meio-dia com dezenas de milhares de lux. Escanearam objetos com dimensões precisamente conhecidas — uma esfera e uma forma personalizada em acrílico — e compararam os tamanhos medidos com a referência. Em distâncias de até aproximadamente meio metro, o erro típico permaneceu abaixo de uma fração de milímetro mesmo sob luz forte, e manteve-se dentro de algumas décimas de milímetro em distâncias maiores até que a linha do laser se tornasse quase invisível ao olho. Métodos existentes projetados para condições escuras não conseguiram reconstruir cenas nesses níveis de luminosidade mais altos.
O que isso significa para a exploração de sítios subaquáticos
Essencialmente, este trabalho mostra que o mapeamento 3D preciso de estruturas subaquáticas rasas não requer lasers de alta potência volumosos nem escuridão perfeitamente controlada. Ao corrigir cuidadosamente a refração da água, enfatizar a cor do laser e usar uma calibração direta que vincula pixels a posições do mundo real, o sistema consegue extrair de forma confiável um traço azul fraco de cenas ensolaradas e ruidosas. Embora o desempenho caia em condições extremamente brilhantes e com certas cores de objetos, a abordagem abre caminho para varreduras mais rotineiras e de baixo custo de recifes, paredes de portos e ruínas submersas, ajudando cientistas e conservadores a construir cópias digitais fiéis de mundos subaquáticos.
Citação: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Palavras-chave: varredura 3D subaquática, reconstrução por linha laser, mapeamento de mar raso, imagens de nuvem de pontos, arqueologia subaquática