Clear Sky Science · pt
Um conjunto de dados multissensor sincronizado no tempo de drones obtido por múltiplos radares e receptor RF
Por que observar o céu importa
Drones rapidamente deixaram de ser apenas brinquedos e ferramentas de filmagem para se tornarem máquinas vitais em entregas, inspeções, agricultura e muito mais. Mas as mesmas aeronaves pequenas que nos ajudam também podem ser usadas para espionagem, contrabando ou até ataques. Parar drones perigosos é difícil porque eles são pequenos, rápidos e frequentemente voam em cenários do mundo real cheios de obstáculos. Este artigo apresenta um novo conjunto de dados aberto que ajuda cientistas e engenheiros a construir sistemas mais inteligentes para detectar, rastrear e identificar drones usando suas impressões digitais invisíveis de rádio em vez de depender apenas da aparência ou do som.
Ouvindo drones com ondas invisíveis
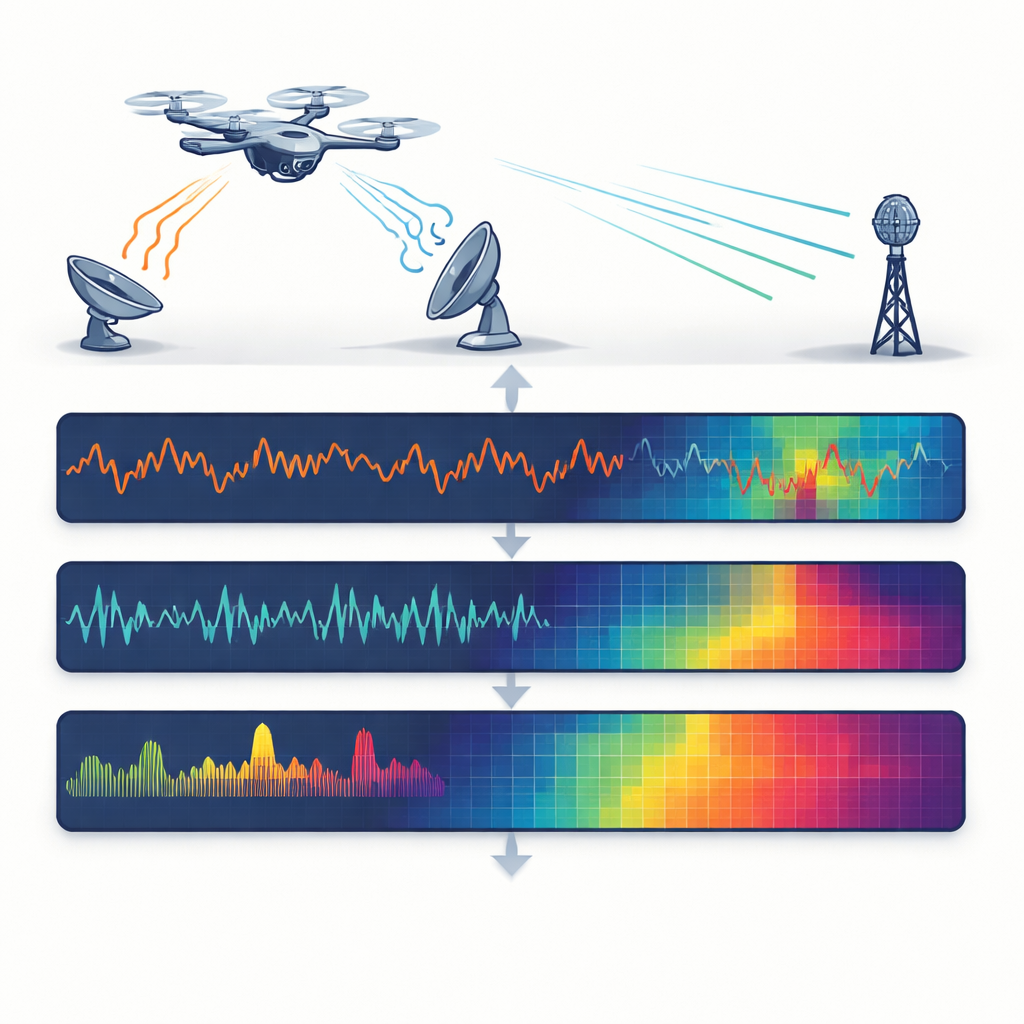
Em vez de confiar em câmeras ou microfones, os pesquisadores se concentram nas ondas de rádio, que funcionam de dia ou de noite e em neblina, chuva ou brilho intenso. Eles usam três sensores baseados em rádio ao mesmo tempo: um radar que envia um tom contínuo para perceber movimento, outro radar que varre frequência para medir distância e velocidade, e um receptor de rádio que simplesmente escuta os sinais de controle e de vídeo do drone. Cada sensor vê o drone de uma forma diferente — por pequenas vibrações das hélices em rotação, pela mudança de distância ao sensor ou pela estrutura do enlace sem fio — como combinar visão, audição e tato para obter um quadro mais completo.

Construindo um campo de testes cuidadosamente controlado
Para criar dados confiáveis, a equipe voou quatro drones comerciais populares e colocou um refletor de canto metálico simples como referência não-dron em um campo aberto livre de grandes edifícios. Todos os alvos pairaram na mesma altura e ficaram voltados para um conjunto de sensores montados juntos em tripés, de modo que cada dispositivo visse a cena a partir de praticamente o mesmo ângulo. Os drones foram medidos a distâncias de 2 a 30 metros em passos de 2 metros, com 500 gravações repetidas para cada combinação de tipo de drone, distância e sensor. Esse desenho cuidadoso possibilita estudar como a detecção muda conforme o drone se afasta e comparar diferentes modelos que variam em tamanho, peso e construção.
Fazendo diferentes sensores respirarem em uníssono
Uma força chave do conjunto de dados é que os três sensores são sincronizados no tempo por software. Todos os dispositivos são controlados por um único programa que os aciona simultaneamente e salva suas saídas em sincronia. Cada gravação de um sensor tem uma parceira correspondente nos outros, alinhada por um índice compartilhado em vez de relógios de hardware complexos. Para os dois radares, o sistema captura sinais brutos ou mapas processados que mostram como a energia refletida se distribui em distância e velocidade. Para o receptor de rádio, armazena o sinal de comunicação bruto. Esse tempo compartilhado permite que pesquisadores fundam diretamente informações entre sensores — correlacionando, por exemplo, um tremor nas hélices com uma explosão no enlace de controle — sem lutar para alinhar os dados depois.
De ondas brutas a imagens prontas para máquinas
Como ferramentas modernas de detecção costumam depender de aprendizado profundo, os autores também convertem as medições brutas em vistas semelhantes a imagens que os computadores podem digerir facilmente. Para o radar de tom contínuo, extraem os padrões de frequência produzidos pelas hélices em rotação, conhecidos como micro-movimentos, e os representam como espectros simples. Para o radar varrente, geram imagens coloridas distância–velocidade que destacam onde e como o drone está se movendo, após remover o ruído de fundo. Para o receptor de rádio, calculam como a potência se distribui entre frequências, criando impressões digitais do estilo de comunicação de cada drone. Cada arquivo bruto tem um arquivo de imagem correspondente, de modo que cientistas podem optar por trabalhar no nível do sinal ou conectar-se diretamente a redes neurais baseadas em imagens padrão.
Provando que mais olhos são melhores do que um
Para demonstrar que o conjunto de dados não é apenas interessante, mas útil, a equipe treina uma conhecida rede de reconhecimento de imagens separadamente nas imagens de cada sensor e depois em combinações fundidas dos três. Como esperado, os radares têm mais dificuldade conforme o drone se afasta: os sinais refletidos enfraquecem e a acurácia de classificação cai com a distância. O receptor de rádio se comporta melhor em alcance, mas alguns drones compartilham bandas de comunicação quase idênticas e são difíceis de distinguir com esse sensor isoladamente. Quando os pesquisadores combinam as três visões em entradas compostas únicas, o desempenho melhora em todas as frentes, especialmente para drones menores e mais difíceis de detectar. Isso demonstra que informação multissensor sincronizada pode compensar os pontos cegos de qualquer dispositivo isolado.
O que isso significa para um espaço aéreo mais seguro
Em termos práticos, os autores construíram um detalhado “campo de treino” público onde algoritmos inteligentes podem aprender a reconhecer drones usando múltiplos tipos de olhos de rádio ao mesmo tempo. Ao divulgar tanto os sinais brutos quanto as imagens prontas para uso, junto com código de exemplo, eles reduzem a barreira para que outros projetem sistemas de detecção que funcionem de forma confiável em condições variadas e a diferentes distâncias. Com o tempo, ferramentas construídas com base nesse conjunto de dados podem ajudar aeroportos, instalações críticas e autoridades municipais a distinguir drones amigáveis de suspeitos, tornando o espaço aéreo de baixa altitude mais seguro sem depender apenas de câmeras ou observadores humanos.
Citação: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
Palavras-chave: detecção de drones, sensoriamento por radar, sinais de radiofrequência, fusão de sensores, conjunto de dados aberto