Clear Sky Science · pt
Um conjunto de dados aberto para aprendizado de máquina e otimização inteligente de trajetórias em sistemas aéreos não tripulados de asa fixa
Por que voos de drones mais inteligentes importam
De levantamentos de culturas a buscas e salvamentos, drones de asa fixa silenciosamente executam uma quantidade crescente de trabalho acima de nossas cabeças. Tornar essas aeronaves mais confiáveis e menos dependentes de pilotos humanos poderia viabilizar entregas mais seguras, monitoramento ambiental mais preciso e operações mais resilientes em emergências ou zonas de conflito. Mas o progresso é cada vez mais limitado não por ideias engenhosas, e sim pela falta de dados do mundo real. Este artigo apresenta um novo conjunto de dados aberto com centenas de voos autônomos de drones, projetado para que engenheiros e estudantes em qualquer lugar possam desenvolver e testar algoritmos de voo mais inteligentes sobre uma mesma base rica e compartilhada.
Um laboratório voador para missões do mundo real
Os autores construíram seu conjunto de dados usando um avião robusto no estilo motoplano chamado Volantex Ranger 2400. Com envergadura de dois metros e meio, formato de asa eficiente e fuselagem espaçosa, a aeronave pode acomodar eletrônicos modernos mantendo-se no ar em missões longas e estáveis. É impulsionada por um motor elétrico montado na parte traseira e por um pacote de baterias de íon-lítio personalizado, ajustado para resistência ao invés de picos de potência. A equipe operou essa plataforma em modo totalmente autônomo, usando rotas pré-planejadas que cobriram fases-chave do voo: decolagem, trechos retos de cruzeiro, curvas fechadas, manobras dinâmicas e pousos automáticos. Esse arranjo controlado, porém realista, transforma o Ranger em um laboratório voador que se comporta como pequenos drones operacionais usados em contextos civis e de defesa.
Dois cérebros, um avião
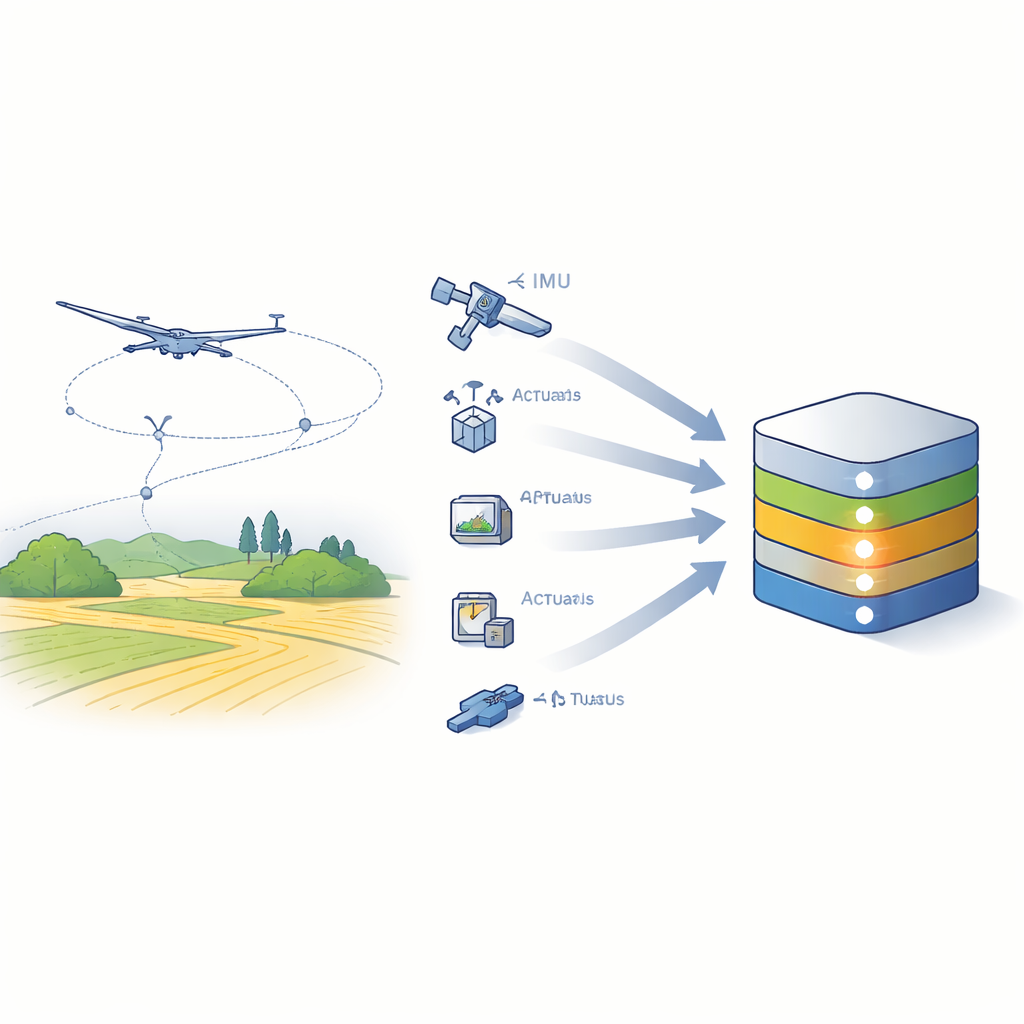
Para capturar uma ampla gama de casos de uso, os pesquisadores equiparam o mesmo casco com dois “cérebros” bem diferentes. Uma configuração usa um controlador de voo compacto e econômico SpeedyBee F405, semelhante ao eletrônico que hobbistas colocariam em um drone caseiro. A outra combina um piloto automático profissional Pixhawk 6X com um poderoso computador Jetson Orin NX, capaz de rodar softwares de inteligência artificial exigentes a bordo. Ambos os sistemas registram telemetria detalhada, incluindo movimento de sensores inerciais, posição e velocidade por GPS, altitude, velocidade do ar, comandos das superfícies de controle, status da bateria e modo de voo, em taxas altas o suficiente para reconstruir o movimento da aeronave com grande detalhe. Mantendo o casco constante enquanto trocam a eletrônica, o conjunto de dados permite aos pesquisadores estudar como diferentes níveis de computação e sensoriamento embarcados afetam o comportamento de voo.
O que existe dentro do conjunto de dados
A coleção resultante IDF-DS consiste em 240 voos autônomos, aproximadamente 32 horas de tempo de voo e dezenas de milhões de amostras registradas. Cada voo é armazenado com uma estrutura de pastas consistente para que os usuários possam encontrar rapidamente o registro principal, o plano de missão, as configurações do controlador e uma trilha GPS pronta para visualização. Uma família de missões segue um padrão em ziguezague sobre um campo retangular, ideal para comparações repetíveis ou treinamento de modelos preditivos. Outra traça um circuito em forma de pista inspirado em um famoso percurso da MotoGP, introduzindo curvas fechadas, arcos amplos e trechos retos que desafiam o piloto automático. Para cada configuração e missão, os registros capturam como a aeronave realmente voou, não apenas como deveria ter voado.
Transformando voos brutos em conhecimento
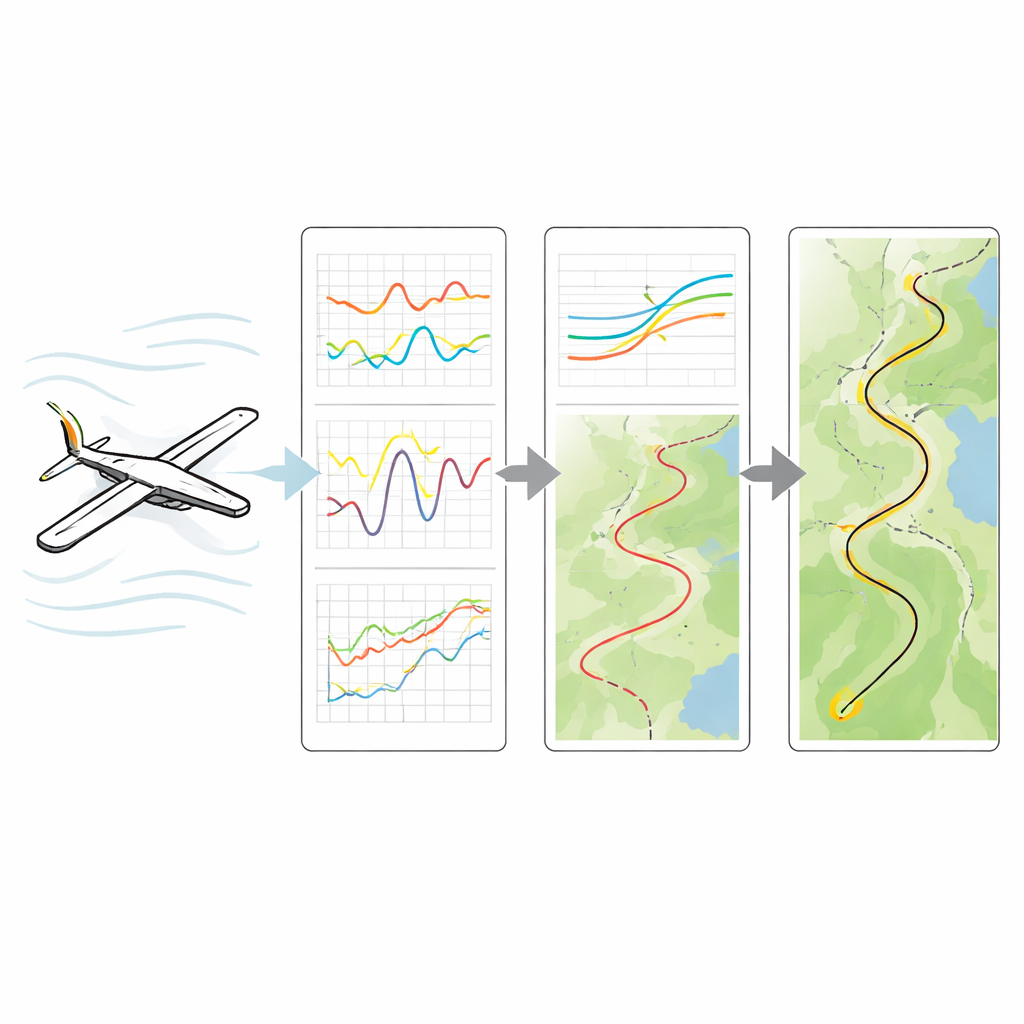
Para mostrar o que pode ser feito com esse tesouro, os autores apresentam várias análises de exemplo. Eles verificam a qualidade dos sensores de movimento embarcados comparando-os com acelerações e rotações inferidas a partir da trajetória baseada em GPS, confirmando que as medições são confiáveis o bastante para servir como “verdade fundamental” no treinamento de modelos. Estudam quão bem o piloto automático estima a velocidade em três direções, quão fielmente a aeronave acompanha o plano de voo e quanta energia elétrica consome durante subidas, curvas e cruzeiros constantes. Combinando velocidade do ar, velocidade relativa ao solo e atitude, eles até reconstruem o vento que o avião experienciou ao longo da rota, construindo um quadro de rajadas e ventos cruzados puramente a partir de leituras a bordo. Outro caso de uso descreve como os mesmos fluxos de dados poderiam treinar um modelo de inteligência artificial para estimar posição quando a navegação por satélite não estiver disponível.
Como esse recurso ajuda voos futuros
Em termos práticos, este trabalho trata de fornecer à comunidade uma “caixa-preta” compartilhada de centenas de voos que qualquer um pode abrir. Em vez de cada equipe ter de coletar seus próprios dados de teste caros — e mantê-los privados — pesquisadores e estudantes podem baixar esse conjunto de dados aberto e imediatamente começar a explorar novas formas de manter drones na rota quando o GPS falha, detectar falhas antes que se tornem perigosas ou estender a vida útil da bateria escolhendo rotas mais eficientes. O artigo em si não constrói esses sistemas inteligentes; ele constrói a base que eles exigem. Para os leitores, a conclusão é que o progresso na autonomia aérea agora depende tanto de registros de voo abertos e cuidadosamente documentados quanto de algoritmos engenhosos — e este conjunto de dados é um passo substancial rumo a esse futuro.
Citação: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Palavras-chave: drones de asa fixa, telemetria de voo, navegação autônoma, conjunto de dados para aprendizado de máquina, otimização de trajetórias