Clear Sky Science · pt
SPICE-HL3: Conjunto de dados de Câmera Único-Fóton, Inercial e Estéreo para Exploração de Paisagens Lunares de Alta Latitude
Por que as Sombras da Lua Importam para Robôs
Missões futuras às regiões polares da Lua buscam aproveitar água congelada e outros recursos, mas essas áreas também estão entre os ambientes mais visualmente desafiadores do Sistema Solar. Sombras longas e móveis, ofuscamento intenso e escuridão quase total podem facilmente confundir as câmeras de um robô. Este artigo apresenta o SPICE‑HL3, um novo conjunto de dados aberto criado dentro de um “pedaço da Lua” em ambiente interno que permite a pesquisadores do mundo todo testar como robôs enxergam e navegam nessas condições polares severas, inclusive com uma avançada câmera de fóton único capaz, literalmente, de ver no escuro.
Construindo um Pedaço dos Polos Lunares na Terra
Como dados reais dos polos lunares são escassos e caros de obter, a equipe construiu um ambiente de testes controlado chamado LunaLab na Universidade de Luxemburgo. Trata-se de uma paisagem interna de 11 por 8 metros preenchida com cascalho basáltico grosseiro, rochas e crateras, cercada por paredes e tetos pretos para imitar o ambiente sem ar e absorvente de luz da Lua. Um potente holofote móvel simula o Sol muito baixo no horizonte, produzindo sombras longas e nítidas e enormes diferenças de brilho entre encostas iluminadas e interiores de crateras totalmente escuros. Ao alterar a posição e a intensidade da lâmpada, os pesquisadores reproduziram quatro regimes de iluminação distintos — referência, meio‑dia, amanhecer/anoitecer e noite — semelhantes ao que um rover experimentaria ao longo de um dia lunar próximo aos polos. 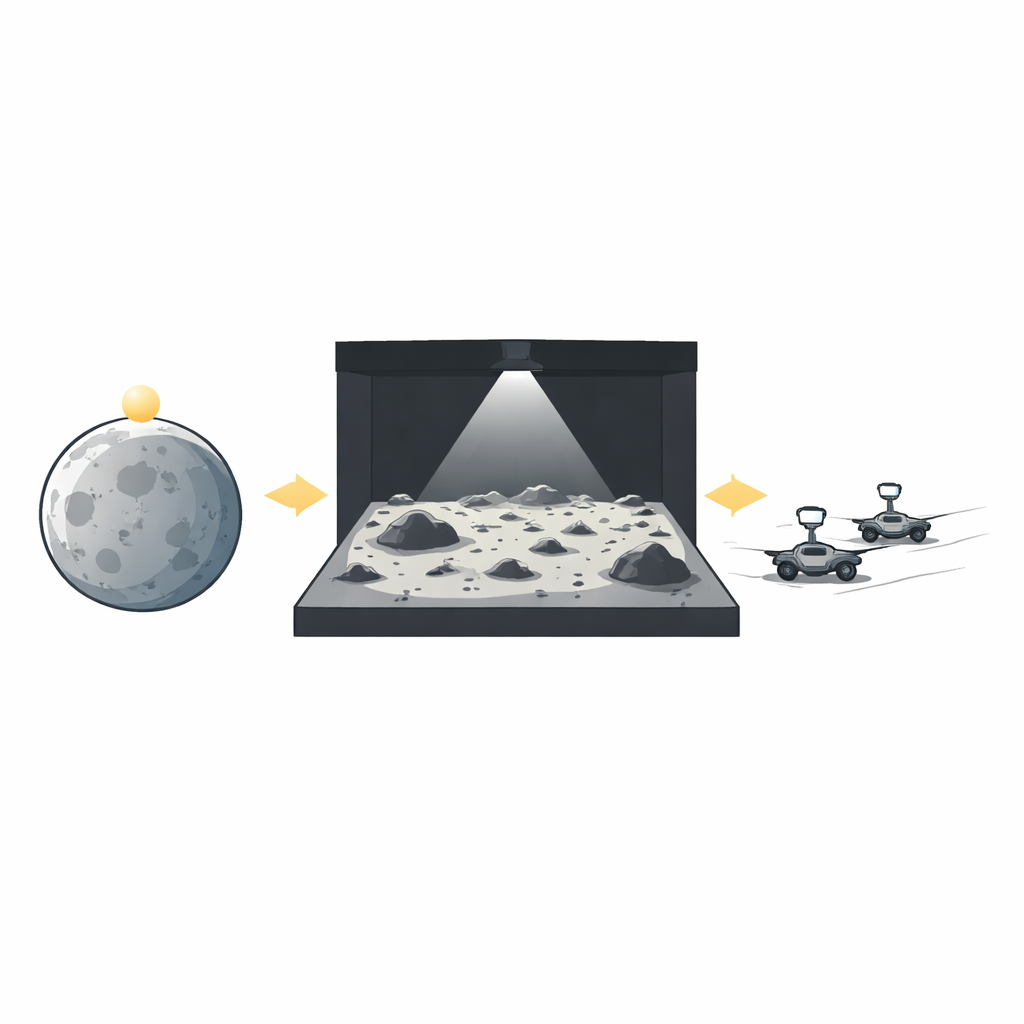
Rovers, Sensores e uma Câmera que Conta Fótons Individuais
O conjunto de dados foi coletado usando dois pequenos rovers com rodas que carregavam diferentes combinações de câmeras e sensores de movimento. Um rover acomodou uma câmera monocromática convencional e uma nova câmera com diodo avalanche de fóton único (SPAD); o outro carregou uma câmera estéreo colorida com profundidade integrada e um sensor de movimento embutido. Ambos os rovers registraram rotação das rodas e dados inerciais, enquanto um sistema de captura de movimento aéreo rastreou suas posições verdadeiras com precisão submilimétrica. A câmera SPAD é a tecnologia de destaque: em vez de medir a luz como um valor contínuo de intensidade, cada pixel informa se detectou fótons individuais, com velocidade e sensibilidade extremamente altas. Ao combinar muitas dessas capturas binárias ultrarrápidas, o sistema pode reconstruir imagens que preservam detalhes mesmo em cenas muito escuras ou de contraste extremamente alto, onde câmeras comuns tendem a borrar ou saturar.
Capturando Percursos Semelhantes aos Lunares em Várias Versões
Para oferecer um campo de testes rico aos pesquisadores, os autores projetaram sete tipos de trajetórias de rover, desde longas travessias com paradas que imitam condução planetária cautelosa até corridas curtas contínuas em diferentes direções em relação ao Sol artificial (em direção a ele, afastando‑se dele e de lado) e giros apertados no próprio lugar. Eles repetiram essas rotas em velocidades lentas, próximas à caminhada, e em execuções dez vezes mais rápidas, sob múltiplas condições de iluminação, às vezes com faróis dos rovers ligados e outras vezes desligados. No total, o SPICE‑HL3 contém 88 sequências sincronizadas no tempo, quase 1,3 milhão de imagens e dados de movimento e verdade de solo correspondentes. As imagens abrangem cenas estáticas ideais para análise cuidadosa e sequências rápidas que testam borrão de movimento e controle de exposição. Tudo está organizado em uma estrutura de arquivos clara, com arquivos de calibração que descrevem exatamente como cada câmera e sensor está orientado e como seus relógios se alinham no tempo.
Testando a Visão de Fóton Único
Além de simplesmente liberar os dados, a equipe avaliou a qualidade e a utilidade das imagens registradas. Compararam como a SPAD, a câmera monocromática e a câmera estéreo lidaram com algumas das situações visuais mais difíceis: conduções ao entardecer e à noite, e trechos em que o rover ficou de frente para o “Sol”. Usando medidas simples de qualidade de imagem e inspeção visual, constataram que a câmera de fóton único preservou de forma consistente a estrutura tanto em regiões iluminadas quanto em sombras, manteve uma ampla gama de níveis de brilho e se mostrou estável em várias condições. Câmeras convencionais tiveram bom desempenho quando a cena estava bem iluminada, mas perderam detalhes em áreas muito escuras ou estouraram realces próximos à fonte de luz. Os autores também verificaram que softwares comuns de mapeamento e localização puderam processar o conjunto de dados com sucesso, confirmando que carimbos de tempo, calibrações e formatos são robustos o suficiente para pesquisa robótica real. 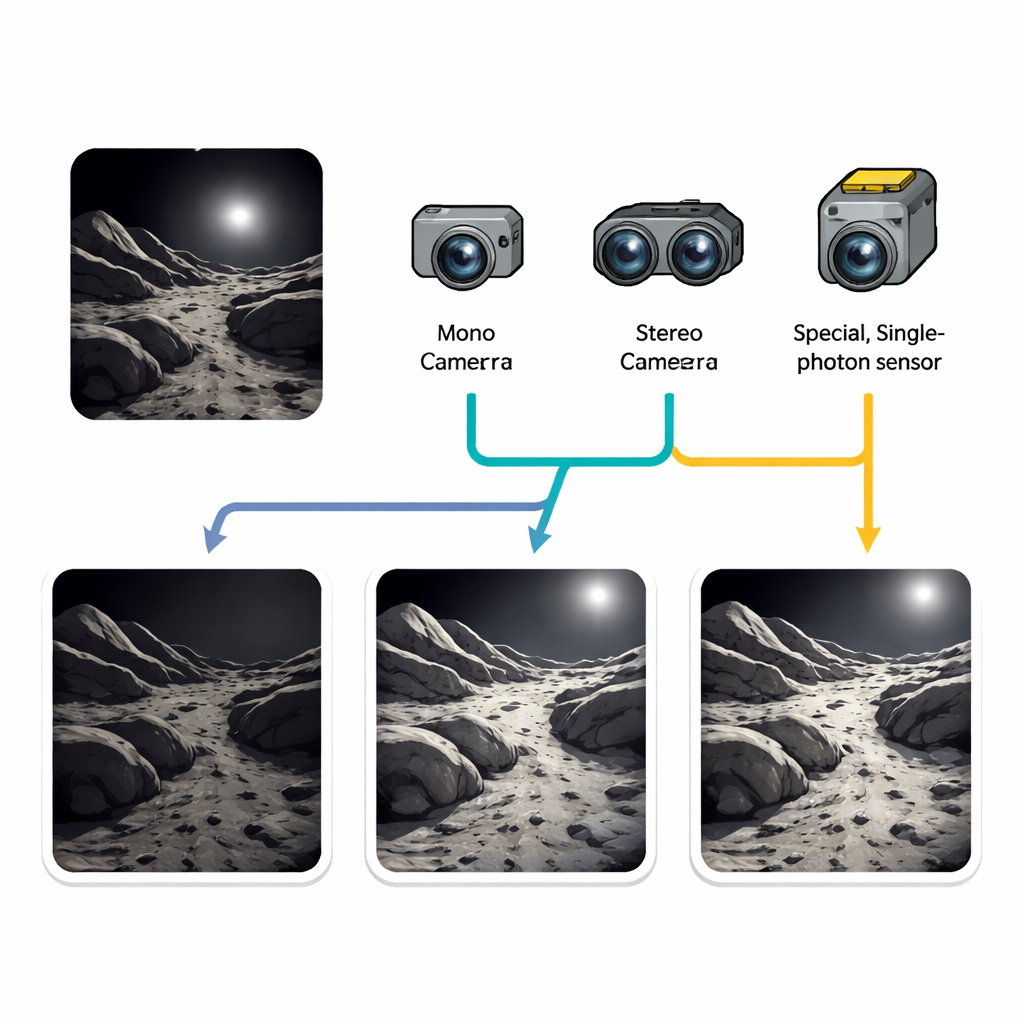
Limites, Advertências e Por Que Isso Importa
Embora o LunaLab não possa reproduzir perfeitamente os minúsculos grãos de poeira e os sutis efeitos de espalhamento de luz do verdadeiro regolito lunar, e algum brilho infravermelho não intencional do sistema de captura de movimento tenha vazado nas cenas mais escuras, os autores argumentam que o SPICE‑HL3 ainda representa um ambiente óptico exigente de “pior caso” para a visão de rovers. Para engenheiros e cientistas que preparam missões aos polos da Lua — ou projetam robôs para qualquer ambiente de baixa luminosidade e alto contraste — o conjunto de dados oferece um raro parâmetro de comparação público. Ele possibilita comparar de forma justa novas tecnologias de câmera, como sensores SPAD, com sistemas tradicionais, melhorar algoritmos de navegação e mapeamento e, em última instância, ajudar a garantir que futuros rovers possam continuar se movendo com segurança através das sombras mutantes da Lua em vez de ficarem presos no escuro.
Citação: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Palavras-chave: robótica lunar, navegação planetária, imagens de fóton único, conjuntos de dados de visão robótica, iluminação extrema