Clear Sky Science · pt
Fabricação in situ escalável de pele eletrônica multimodal para robótica inteligente e sistemas interativos
Dando Sentido do Tato a Robôs e Brinquedos
Imagine um robô que consegue pegar delicadamente uma fatia de pão quente sem esmagá‑la nem queimar sua mão, ou um brinquedo que responde de maneira diferente quando você o abraça, dobra sua orelha ou aquece com a palma da mão. Esta pesquisa descreve um novo tipo de “pele eletrônica” que aproxima essas ideias da realidade ao conferir às máquinas um sentido de toque e percepção do entorno mais rico e próximo ao humano.
Por que as Máquinas Precisam de um Tato Melhor
Os robôs e aparelhos de hoje ainda são desajeitados ao lidar com o mundo real. Muitos só conseguem perceber uma única coisa, como pressão, e frequentemente dependem de peças volumosas montadas manualmente, difíceis de escalar. A pele humana, no entanto, mistura continuamente muitos sinais ao mesmo tempo: toque suave, pressão firme, estiramento, calor e até uma noção de proximidade antes do contato. Os autores deste estudo propuseram criar uma versão eletrônica de pele capaz de captar várias dessas sensações simultaneamente, sendo fina, flexível e facilmente customizável para diferentes tarefas.
Construindo um Sentido do Tato Fino e Flexível
A equipe criou uma “e‑skin” de baixo perfil usando um processo sem sala limpa, escalável e rapidamente adaptável. No seu núcleo há um circuito flexível de cobre padronizado por laser ultravioleta, que funciona como a fiação de uma placa de circuito, mas pode dobrar e envolver superfícies curvas. Acima e abaixo desse circuito, eles adicionaram uma camada macia de silicone repleta de pequenas bolsas de ar, parecida com uma esponja. As superfícies externas são revestidas por um filme fino de nanotubos de carbono, formando uma casca condutora que tanto protege o dispositivo contra ruído elétrico quanto serve como camada de referência comum para a detecção. Essa pilha permite que cada almofada sensora se comporte como um pequeno capacitor elétrico cujo valor muda quando o material é pressionado, dobrado, aquecido ou aproximado de um objeto. Pequenos chips adicionais montados no mesmo circuito flexível medem temperatura e distância sem contato, de modo que toda a folha imita não apenas os receptores de pressão e estiramento da pele, mas também uma sensação de calor e uma “visão” de proximidade. 
Como os Sensores Percebem Pressão e Movimento
As partes de pressão e flexão da e‑skin foram projetadas para reagir fortemente a pequenas variações, mantendo durabilidade. Quando algo pressiona para baixo, os poros na camada macia se comprimem, aproximando as camadas metálicas internas e substituindo o ar por mais silicone. Ambos os efeitos aumentam o sinal elétrico, especialmente em pressões baixas, nas quais o material é mais fácil de comprimir. Testes mostraram que a e‑skin pode detectar toques muito leves, na ordem de algumas dezenas de pascais, com resposta rápida e pouco desvio mesmo após dez mil ciclos de pressão e relaxamento. Quando a folha se dobra, ela se enrola em torno da fiação interna, novamente reduzindo a separação entre camadas de um lado e ampliando o sinal. A resposta cresce de forma mais perceptível em ângulos de dobra maiores, correspondendo ao fato de que dobras no mundo real tendem a se localizar em uma área em vez de se espalharem uniformemente. No geral, o projeto equilibra maciez, estabilidade e sensibilidade sem as estruturas complexas em pilha usadas em muitos dispositivos anteriores. 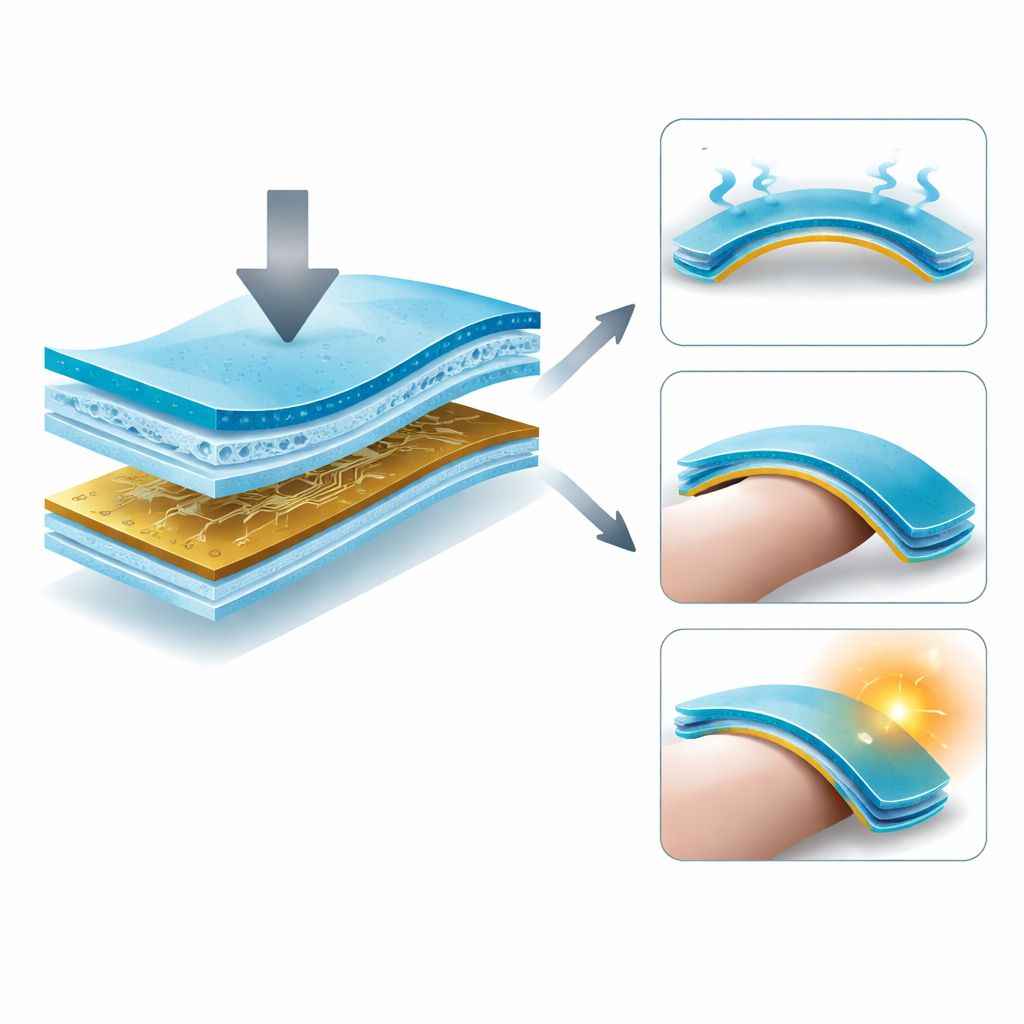
De Robôs de Cozinha a Companheiros Brincalhões
Para demonstrar o que essa e‑skin pode fazer, os pesquisadores a envolveram em uma garra robótica e atribuíram ao robô uma tarefa do tipo culinária. À medida que a garra se aproxima de uma fatia de pão quente, um pequeno módulo de sensoriamento de profundidade embutido na pele mapeia primeiro a distância ao objeto, ajudando o robô a alinhar os dedos antes do contato. Uma vez em contato, os sensores de pressão e dobra guiam a força de apreensão, evitando deslizamentos ou o esmagamento do pão. Um sensor de temperatura na mesma folha verifica quando o pão esfria o bastante para ser entregue com segurança a uma pessoa. Em outro exemplo, a equipe construiu um brinquedo macio em forma de elefante coberto com e‑skin. Pressionar o peito altera o ritmo de um motor de vibração oculto para parecer um batimento cardíaco, dobrar uma orelha aciona som, e o calor de uma mão pode iluminar as bochechas do brinquedo, transformando o toque em uma interação lúdica e emocional.
Vendo Padrões de Pressão em uma Superfície
Além de pontos individuais, o mesmo método de fabricação pode formar grandes matrizes sensoriais de pressão que leem onde e com quanta força uma superfície está sendo tocada. A equipe demonstrou uma grade de 8 por 15 que funciona como uma câmera de pressão: à medida que dedos, pesos ou formas carimbadas pressionam, o sistema reconstrói o padrão de forças e até identifica contornos como letras. Essa capacidade de capturar mapas de pressão e centros de massa pode ajudar robôs a equilibrar cargas, reconhecer objetos ou servir como plataformas inteligentes de pesagem e superfícies interativas. Como o processo subjacente é rápido e modular, projetistas podem ajustar o tamanho, o espaçamento e a maciez dos pixels sensoriais para usos diferentes, desde móveis inteligentes até tapetes de monitoramento postural.
O Que Isso Significa para a Tecnologia do Dia a Dia
Ao combinar múltiplos modos de sensoriamento — pressão, dobra, calor e proximidade — em uma única folha fina e facilmente customizável, este trabalho aproxima a pele eletrônica das capacidades sutis da pele humana. Embora haja espaço para melhorar o desempenho em pressões muito altas e para automatizar algumas etapas de montagem, a abordagem já demonstra que um tato rico pode ser adicionado a robôs, brinquedos e outros dispositivos sem hardware volumoso ou montado à mão. Em termos práticos, isso pode levar a robôs domésticos que manuseiam objetos frágeis com mais segurança, wearables médicos que registram o contato corporal de forma mais confortável e produtos interativos que respondem ao nosso toque de maneiras muito mais naturais.
Citação: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Palavras-chave: pele eletrônica, sensoriamento tátil, sensores flexíveis, garra robótica, dispositivos interativos