Clear Sky Science · pt
Atuador biomimético fabricado a partir de um nanocompósito de polímero ferroelétrico relaxor
Robôs minúsculos que se movem como insetos reais
Imagine um robô do tamanho de uma lagarta que consegue rastejar sobre terrenos acidentados, ou um dispositivo parecido com uma borboleta que bate as asas e decola — e tudo isso feito a partir de uma única peça de plástico tão fina quanto papel e consumindo menos energia que uma lâmpada LED noturna. Este artigo descreve um novo tipo de material macio que pode funcionar como músculo artificial, tornando robôs em escala de inseto mais simples, leves e energeticamente eficientes do que antes.
Por que máquinas pequenas e macias importam
Robôs em miniatura inspirados por insetos podem se infiltrar em prédios desabados para buscar sobreviventes, percorrer canos para inspecionar infraestrutura ou monitorar silenciosamente plantações e florestas. Para operar em espaços estreitos e imprevisíveis, eles devem ser pequenos, flexíveis e resistentes, ao mesmo tempo em que consomem pouquíssima energia. Muitos projetos atuais dependem de montagens complicadas de engrenagens, dobradiças e múltiplos materiais, o que aumenta o peso, desperdiça energia e dificulta a miniaturização. Os autores defendem que a solução ideal é um único material capaz de gerar movimento e transmiti-lo diretamente, assim como o músculo real nos animais.
Um plástico inteligente projetado de dentro para fora
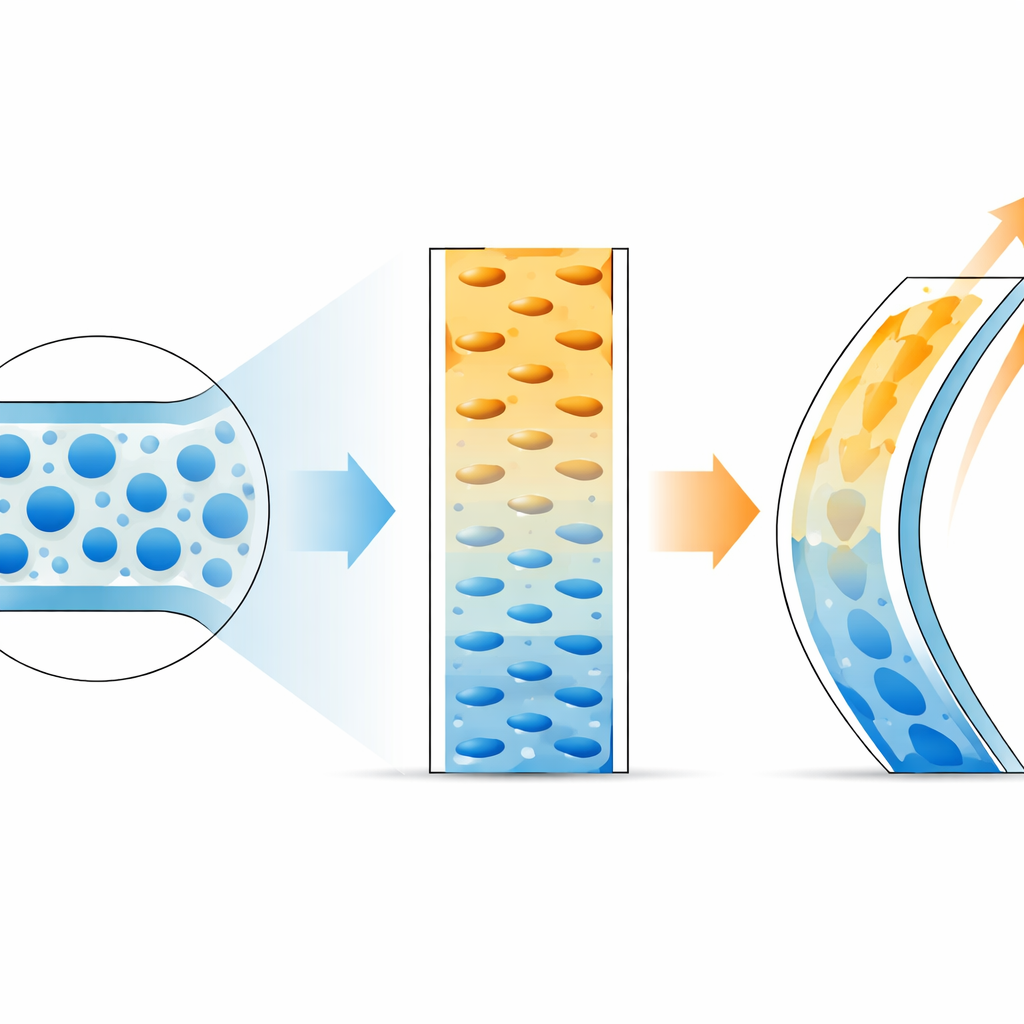
No cerne deste trabalho está uma película plástica fina baseada em uma família bem conhecida de materiais chamada PVDF, já valorizada por sua capacidade de se deformar quando exposta a um campo elétrico. Os pesquisadores misturam esse plástico com minúsculos “pontos poliméricos”, partículas em escala nanométrica cobertas por grupos químicos que podem formar ligações de hidrogênio. Quando a mistura é lançada como filme e aquecida lentamente de forma controlada, o solvente evapora mais rápido na parte superior do que na inferior. Essa secagem desigual, juntamente com as ligações de hidrogênio, incentiva as cadeias plásticas próximas à superfície inferior a se alinharem em uma disposição polar altamente ordenada, enquanto o topo permanece menos ordenado. O resultado é um gradiente interno embutido através da espessura de uma única camada.
De estrutura oculta a movimento poderoso
Esse sutil gradiente estrutural tem um grande retorno mecânico. Quando um campo elétrico é aplicado através do filme, a região inferior, mais ordenada e fortemente polar, responde mais do que a superior, de modo que um lado da folha se expande mais que o outro. Esse desequilíbrio faz toda a tira se curvar, muito parecido com uma tira bimetálica clássica em um termostato, mas aqui isso ocorre em um filme orgânico e flexível com apenas algumas dezenas de micrômetros de espessura. Medições cuidadosas mostram que o filme pode variar seu comprimento em até cerca de 14% e armazenar densidades de energia mecânica aproximando-se das de atuadores cerâmicos rígidos — ainda que permaneça macio e leve. Em comparação com um filme idêntico sem pontos poliméricos ou sem o processamento que gera o gradiente, o novo material produz várias vezes mais deformação e converte energia elétrica em movimento com muito mais eficiência.
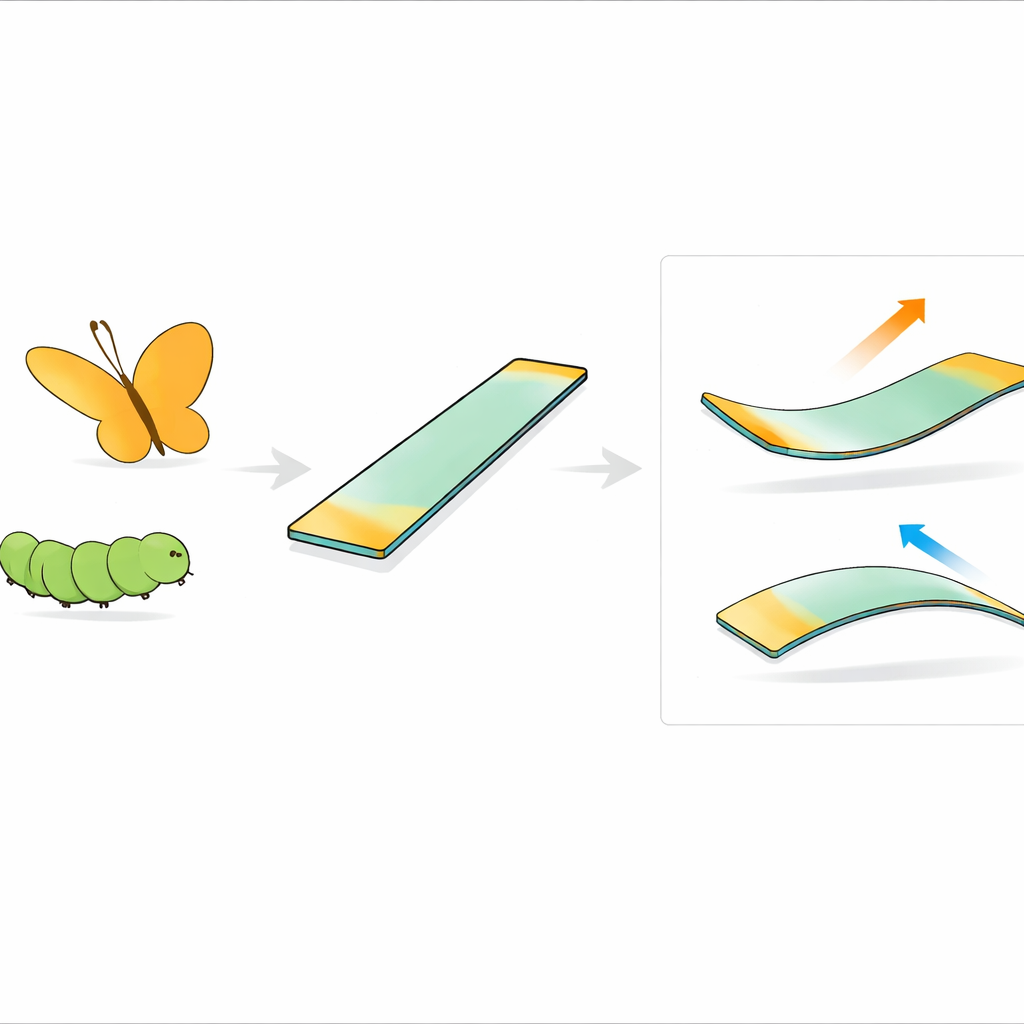
Construindo uma lagarta rastejante e uma borboleta voadora
Para demonstrar o que este material pode fazer na prática, a equipe recorta o filme em formas semelhantes a insetos e adiciona eletrodos simples à base de carbono e finos suportes de cobre. Um projeto lembra uma pequena lagarta com meio mais largo e extremidades afiladas; quando um campo elétrico alternado é aplicado, a tira se curva num padrão rítmico e rasteja ao longo de uma pista estriada a velocidades de várias vezes o comprimento do corpo por segundo, usando apenas alguns miliwatts de potência. Um segundo projeto imita uma borboleta, com uma região central ativa e asas flexíveis. Movidas por sinais elétricos semelhantes, as asas batem rapidamente e podem erguer o dispositivo alguns milímetros de uma plataforma, chegando a transportar cargas de até vinte vezes seu próprio peso — tudo com uma massa total de atuador de aproximadamente 50 miligramas.
O que isso significa para futuros robôs minúsculos
Este estudo mostra que, ao engenheirar cuidadosamente como um material plástico é organizado de um lado ao outro, é possível criar uma única lâmina ultrafina que se curva fortemente sob um campo elétrico e pode alimentar movimentos complexos e realistas. Embora os dispositivos atuais ainda exijam tensões relativamente altas, seu consumo de energia extremamente baixo e construção ultraleve os tornam blocos de construção promissores para futuros robôs e dispositivos inteligentes em escala de inseto. Com refinamentos adicionais para reduzir a tensão de operação, filmes semelhantes poderiam, um dia, viabilizar frotas de máquinas minúsculas e autônomas que rastejam, batem asas e exploram o mundo usando músculos artificiais tão finos quanto um fio de cabelo.
Citação: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Palavras-chave: robótica macia, músculos artificiais, atuadores poliméricos, robôs em escala de inseto, materiais eletroativos