Clear Sky Science · pt
Decodificando movimentos de membro fantasma a partir de gravações intraneurais
Novas maneiras de se mover com uma perna ausente
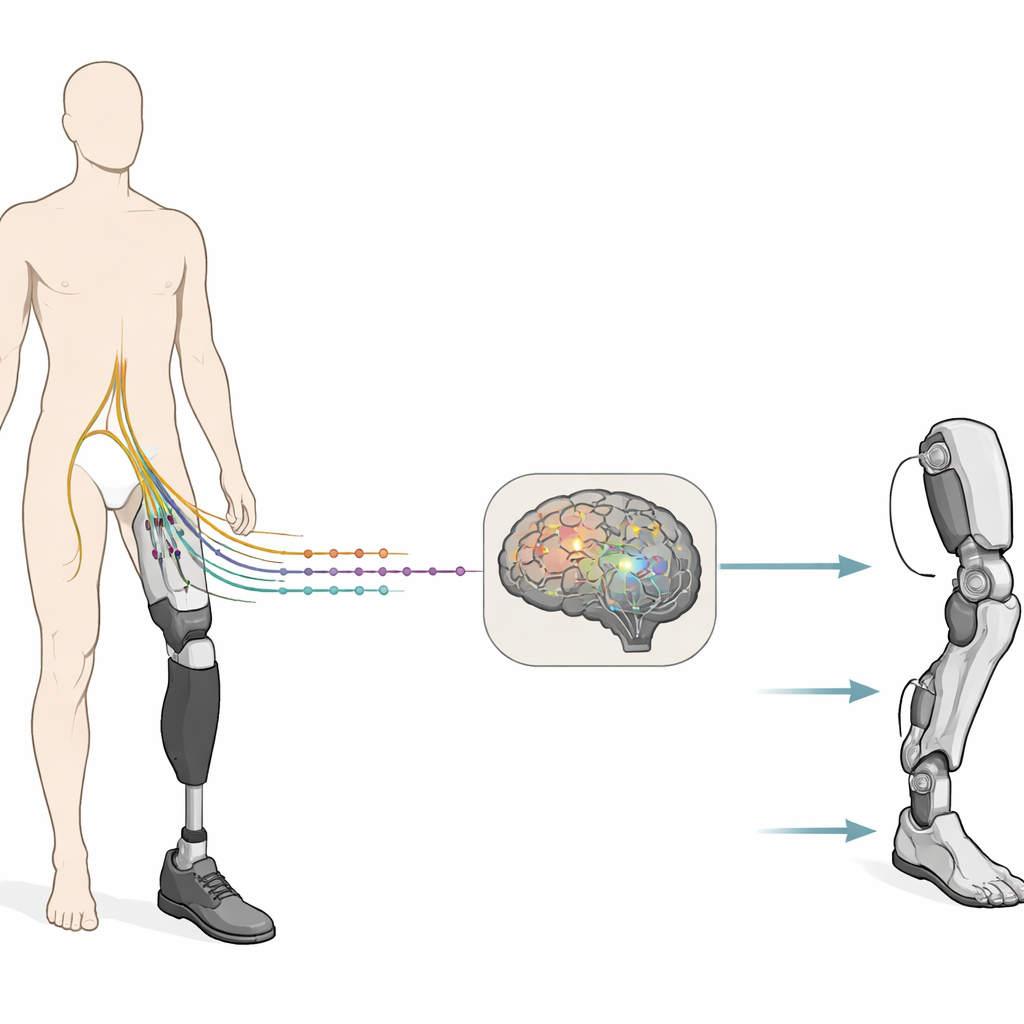
Para pessoas que perderam uma perna acima do joelho, andar com uma prótese pode parecer mais como guiar uma máquina rígida do que mover uma parte do próprio corpo. Este estudo explora um caminho diferente: ouvir diretamente os nervos remanescentes da perna quando amputados tentam mover sua perna “fantasma” e usar esses sinais para controlar uma futura perna biônica. Ao acessar as mesmas conexões que o cérebro usava para mover o joelho, o tornozelo e os dedos, os pesquisadores mostram que o controle natural e intuitivo de uma perna artificial pode estar ao alcance.
Ouvindo os nervos dentro da coxa
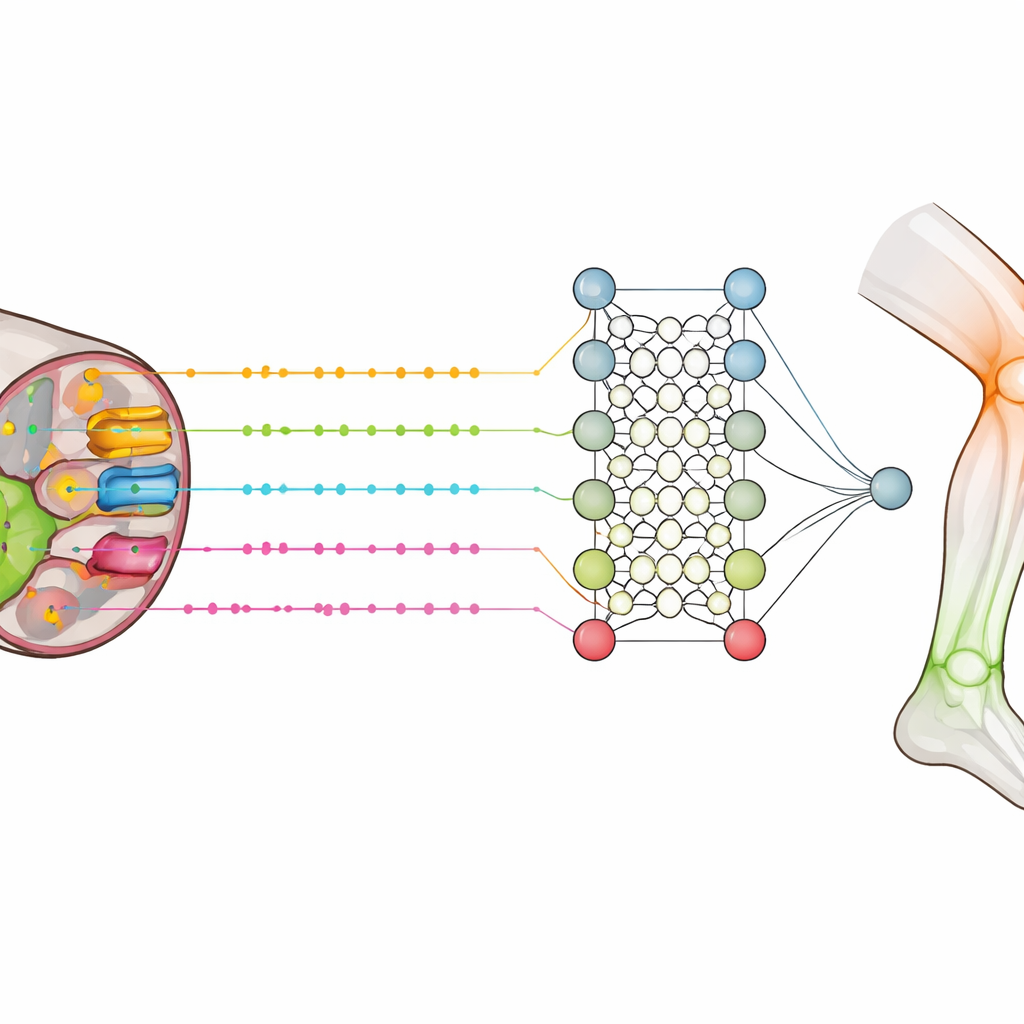
A equipe trabalhou com dois voluntários que haviam perdido a perna acima do joelho, mas ainda podiam sentir vividamente e “mover” seu membro fantasma. Cirurgiões implantaram quatro tiras de eletrodos finíssimas dentro de um ramo do nervo ciático na parte de trás da coxa. Cada tira continha múltiplos sítios de gravação minúsculos, totalizando 56 canais. Quando os participantes estavam sentados e solicitados a flexionar e estender o joelho fantasma, o tornozelo ou os dedos sob comando, os eletrodos captaram explosões de atividade elétrica de fibras nervosas que antes controlavam músculos agora ausentes após a amputação.
Movimentos fantasmas deixam traços elétricos reais
Mesmo com a parte inferior da perna ausente, as tentativas de movê-la produziram sinais claros e estruturados no nervo. A maioria dos sítios de gravação respondeu a pelo menos um tipo de movimento, e muitos distinguiram entre flexão e extensão. Alguns eletrodos eram mais sintonizados com movimentos do joelho, outros com tornozelo ou dedos, espelhando como diferentes grupos musculares estão conectados ao nervo. A intensidade e o tempo dos padrões de disparo nervoso variaram de articulação para articulação, sugerindo que o “mapa” original do corpo para o controle da perna sobrevive no tronco nervoso remanescente. Os pesquisadores também descobriram que esses padrões motores se alinharam bem com a anatomia conhecida: canais nervosos que acendiam para um determinado movimento tendiam a corresponder aos músculos que normalmente produziriam aquele movimento.
Treinando um decodificador inspirado no cérebro
Captar a atividade nervosa é apenas metade da história; uma prótese futura precisa converter rapidamente esses sinais complexos em comandos. Os cientistas recorreram a uma rede neural de disparo, um tipo de rede artificial que comunica usando pulsos elétricos breves, muito parecido com os neurônios reais. Primeiro transformaram as gravações nervosas brutas em trens densos de spikes que enfatizavam como a potência do sinal variava ao longo do tempo. Esses trens de spikes foram então alimentados em um decodificador compacto que aprendeu a classificá-los em “classes” de movimento, como flexão do tornozelo ou extensão do joelho. Em comparação com ferramentas padrão de aprendizado de máquina, o decodificador por spikes foi tanto mais preciso quanto mais eficiente, reconhecendo confiavelmente múltiplos movimentos pretendidos a partir de curtos trechos de atividade nervosa.
Combinando sinais nervosos e musculares
Como os eletrodos ficavam entre músculos da coxa, eles também captavam pequenos sinais musculares em uma faixa de frequência mais baixa. Filtrando as gravações, a equipe pôde separar a atividade do tipo muscular dos spikes nervosos mais rápidos. Quando treinaram seu decodificador apenas com sinais musculares, o desempenho melhorou em comparação ao uso somente dos dados nervosos de alta frequência. Melhor ainda, combinar ambas as fontes — nervo e músculo residual — aumentou ainda mais a precisão, especialmente para ações do joelho e tornozelo. Isso sugere que uma única tecnologia implantada poderia acessar tanto o tráfego nervoso quanto a atividade muscular remanescente para fornecer um sinal de controle mais rico e estável para uma perna robótica.
Sentir o chão enquanto move a perna
Os mesmos eletrodos intraneurais que ouviam comandos de movimento também poderiam ser usados na direção oposta: enviar pequenos pulsos elétricos de volta ao nervo e evocar sensações. Em trabalhos anteriores com esses voluntários, a estimulação por meio desses implantes produziu sensações de toque na sola do pé e nos dedos. No presente estudo, os pesquisadores mapearam onde gravações relacionadas ao motor e sensações táteis se sobrepunham. Eles descobriram que as fibras nervosas para movimento e sensação estavam amplamente separadas ao nível da coxa, o que poderia ajudar os projetistas a atribuir alguns contatos principalmente à decodificação motora e outros principalmente ao feedback sensorial, reduzindo a interferência entre os dois.
O que isso significa para futuras pernas biônicas
Para um leitor leigo, a mensagem central é que os “fios” para mover uma perna ausente continuam ativos e legíveis, mesmo anos após a amputação. Ao colocar eletrodos finos dentro do nervo remanescente e usar algoritmos inspirados no cérebro para interpretar os sinais, é possível dizer, momento a momento, se um amputado está tentando dobrar o joelho, apontar o tornozelo ou encolher os dedos de um membro fantasma. Quando pareado com estimulação elétrica que restaura uma sensação de toque do pé ausente, essa abordagem poderia permitir próteses que sentem e se movem muito mais como um membro natural. Embora o trabalho ainda esteja em estágio inicial de laboratório e tenha sido testado offline em apenas duas pessoas, ele estabelece uma base importante para próteses futuras que se conectem diretamente ao sistema nervoso, oferecendo controle mais intuitivo, melhor equilíbrio e uma sensação de incorporação mais forte.
Citação: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Palavras-chave: membro fantasma, neuropróteses, interface de nervo periférico, redes neurais de disparo, amputação de membro inferior