Clear Sky Science · pt
Robô voador autônomo em forma de mão para agarrar e interagir no ar
Assistentes voadores que você quase pode cumprimentar
Imagine um pequeno robô voador que não só filma o ambiente, mas também pode abrir uma porta, lhe entregar uma bebida ou retirar um pacote de uma prateleira de difícil acesso. Este estudo apresenta exatamente esse tipo de aparelho: um drone compacto cujo corpo funciona também como uma mão. Ao combinar ideias do voo de aves e da preensão humana, os pesquisadores mostram como robôs aéreos podem ir além da observação passiva e tornar-se ajudantes ativos em residências, fábricas e em operações de busca e salvamento.
De câmeras voadoras a mãos voadoras
A maioria dos drones hoje são “olhos voadores” usados para fotografia, mapeamento ou inspeção. Quando engenheiros tentam acrescentar braços robóticos para que drones possam agarrar ou empurrar objetos, as máquinas rapidamente se tornam volumosas, pesadas, exigem muita energia e ficam difíceis de controlar — especialmente em ambientes internos ou perto de pessoas. Os autores enfrentam esse problema repensando o próprio corpo do drone. Em vez de acoplar um braço separado, eles projetam toda a estrutura para atuar como uma mão que pode envolver objetos, empoleirar-se em postes ou árvores e ainda voar com agilidade por espaços apertados.
Um corpo voador em forma de mão
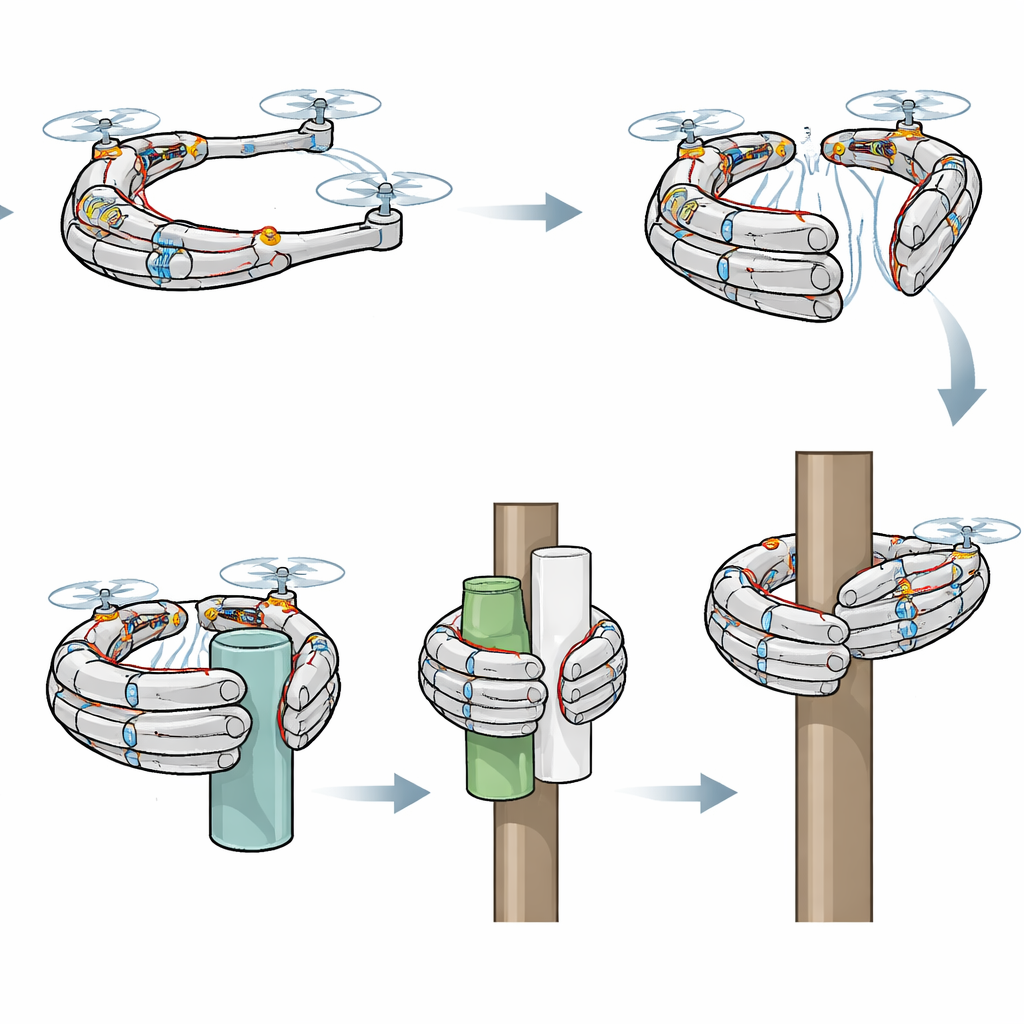
O novo robô, chamado HI‑ARM, tem aproximadamente o tamanho e o peso de uma mão adulta. Sua estrutura forma um C aberto que lembra uma palma curva com dedos. Dentro desse anel há segmentos telescópicos e juntas de torção, acionados não por muitos motores, mas por um único cordão semelhante a um tendão puxado por um servomotor. Molas permitem que a estrutura se dobre e depois retorne à forma original, armazenando e liberando energia de maneira semelhante aos músculos e tendões. Esse projeto subatuado permite que o robô se ajuste a objetos desconhecidos: à medida que o cordão é tensionado, diferentes partes se comprimem e torcem até se conformarem naturalmente ao que está sendo agarrado.
Como o robô pensa e voa
Para tornar esse corpo metamórfico útil, a equipe construiu um “cérebro” em camadas para o robô. Uma parte planeja para onde o drone deve voar e quando deve agarrar, abrir ou empoleirar‑se, recorrendo a uma biblioteca de ações básicas como “agarrar”, “soltar” ou “empoleirar em poste”. Outra parte converte esses planos em trajetórias suaves no espaço que o drone pode seguir em tempo real. Um sistema de controle rápido então estima constantemente a posição do robô, a localização variável do centro de gravidade conforme ele se deforma, e as forças extras quando pega ou empurra objetos. Algoritmos adaptativos detectam essas perturbações e automaticamente reforçam ou reequilibram a empuxo das quatro hélices para que o voo permaneça estável mesmo enquanto o corpo está apertando uma garrafa ou empurrando uma porta.
O que essa mão voadora pode fazer
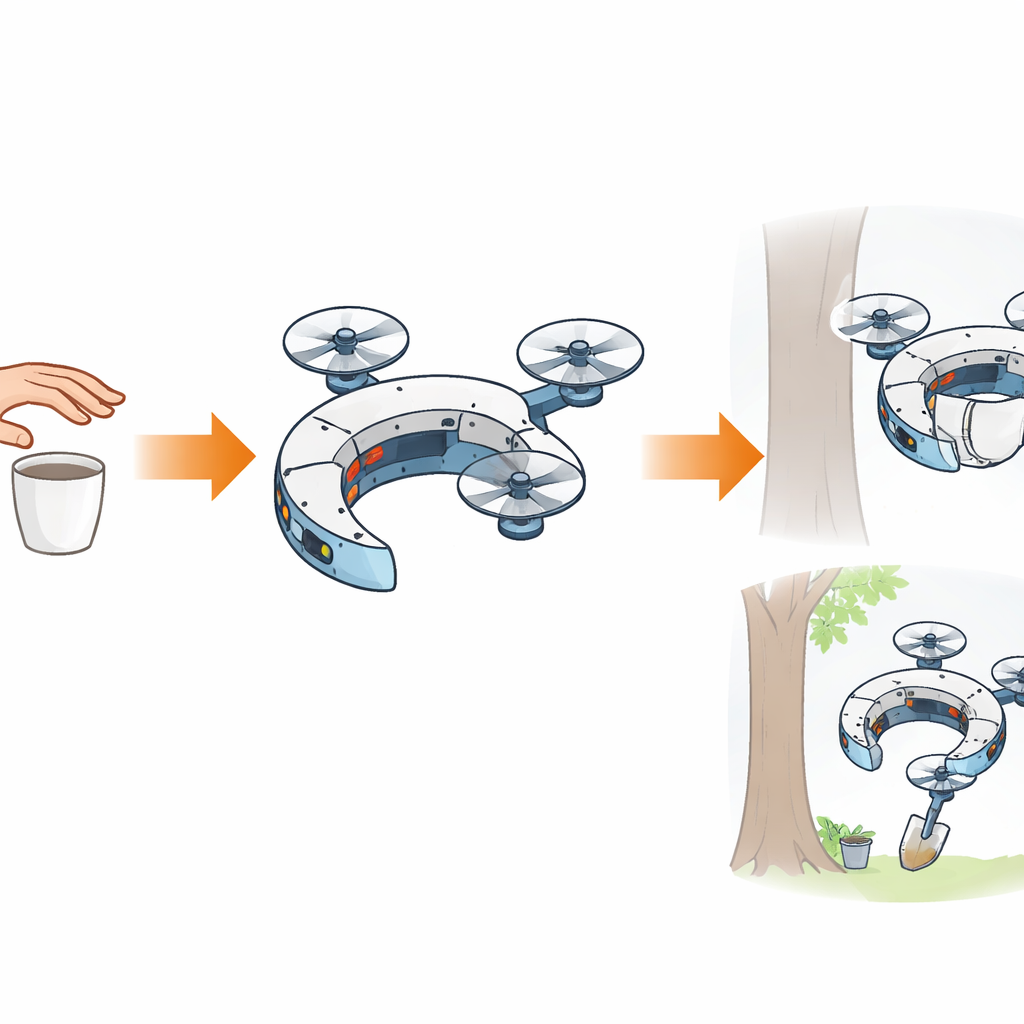
Em testes internos, o HI‑ARM realiza ações familiares e semelhantes às humanas. Usa sua “palma” para agarrar e transportar uma garrafa d’água cheia ao longo de uma trajetória de voo precisa, e suas “pontas dos dedos” para beliscar e levantar um único guardanapo fino — uma tarefa especialmente delicada para uma máquina. O mesmo mecanismo se adapta a brinquedos, caixas, sacos e blocos de formas irregulares sem precisar conhecer seus formatos previamente. O robô pode voar até um tronco de árvore ou poste, fechar‑se ao redor dele, desligar suas hélices e simplesmente ficar pendurado ali, consumindo bem menos energia que pairar. Também pode se aproximar de uma porta, envolver a maçaneta e abrir a porta enquanto se mantém equilibrado apesar das forças de reação.
Auxiliando pessoas e atuando ao ar livre
Os pesquisadores também exploram como esse dispositivo poderia interagir com pessoas. Em uma cena doméstica, o drone pega um pacote da mão de uma pessoa, guarda‑o, busca uma bebida na mesa, entrega‑a, depois recolhe a garrafa vazia e finalmente empoleira‑se em um cabideiro para aguardar a próxima tarefa — tudo em uma sequência contínua e suave. Usando óculos de vídeo e um controlador simples operado com uma mão, uma pessoa com mobilidade reduzida guia remotamente o robô para pegar um copo de café ao ar livre e trazê‑lo de volta por dezenas de metros. Em testes externos, o drone empoleira‑se em bambus e postes, espreme‑se por uma fenda estreita em rocha reduzindo seu corpo, e transporta uma bebida atravessando um rio, sugerindo papéis em entrega, inspeção e resgate.
O que isso significa para o cotidiano
O trabalho demonstra que um pequeno robô voador em forma de mão pode combinar voo ágil com formas de preensão, empoleiramento e interação com objetos e pessoas surpreendentemente humanas. Ao integrar estreitamente o projeto do corpo, o planejamento de movimento e o controle adaptativo, os autores superam muitos dos problemas de tamanho e estabilidade que limitaram manipuladores aéreos anteriores. Embora versões futuras precisem de visão embarcada melhor e tomada de decisão mais inteligente para operar de forma totalmente autônoma, este estudo aponta para um futuro em que “mãos voadoras” podem ajudar a entregar pacotes, auxiliar pessoas com deficiência, manter infraestruturas e realizar tarefas delicadas em locais de difícil ou perigoso acesso para humanos.
Citação: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Palavras-chave: manipulação aérea, mão robótica voadora, drones, interação humano-robô, robótica biomimética