Clear Sky Science · pt
Um olho composto biónico artificial em escala de inseto
Olhos e narizes robóticos em um pacote minúsculo
Imagine um robô inseto que não só consegue ver para onde vai, mas também “cheirar” gases perigosos no ar—tudo usando um dispositivo não maior que o olho de uma mosca real. Este artigo descreve exatamente essa criação: um olho composto artificial em miniatura que combina visão e olfato em um único sensor ultraleve. Ao emprestar truques de drosófilas e outros insetos, os pesquisadores mostram como drones e pequenos robôs do futuro poderiam navegar por ambientes perigosos e cheios de obstáculos de forma rápida e segura, consumindo pouquíssima energia.

O que a natureza ensinou aos engenheiros
Insetos como as drosófilas dependem de olhos compostos—cúpulas cheias de centenas de pequenas lentes—para detectar movimento por um amplo campo de visão, ajudando-os a evitar predadores e obstáculos. Ao mesmo tempo, suas antenas fornecem um olfato aguçado, permitindo detectar alimentos, parceiros ou ameaças no ar. Ambos os fluxos de informação são combinados no cérebro do inseto para orientar decisões rápidas. Os autores se propuseram a recriar esse sentido duplo em hardware: um único dispositivo em escala de inseto que imita o olho da mosca para detecção de movimento em ângulo amplo e integra um “nariz” químico para analisar o ar circundante, fundindo ambos os sinais para um comportamento mais inteligente.
Construindo um pequeno olho curvo que realmente funciona
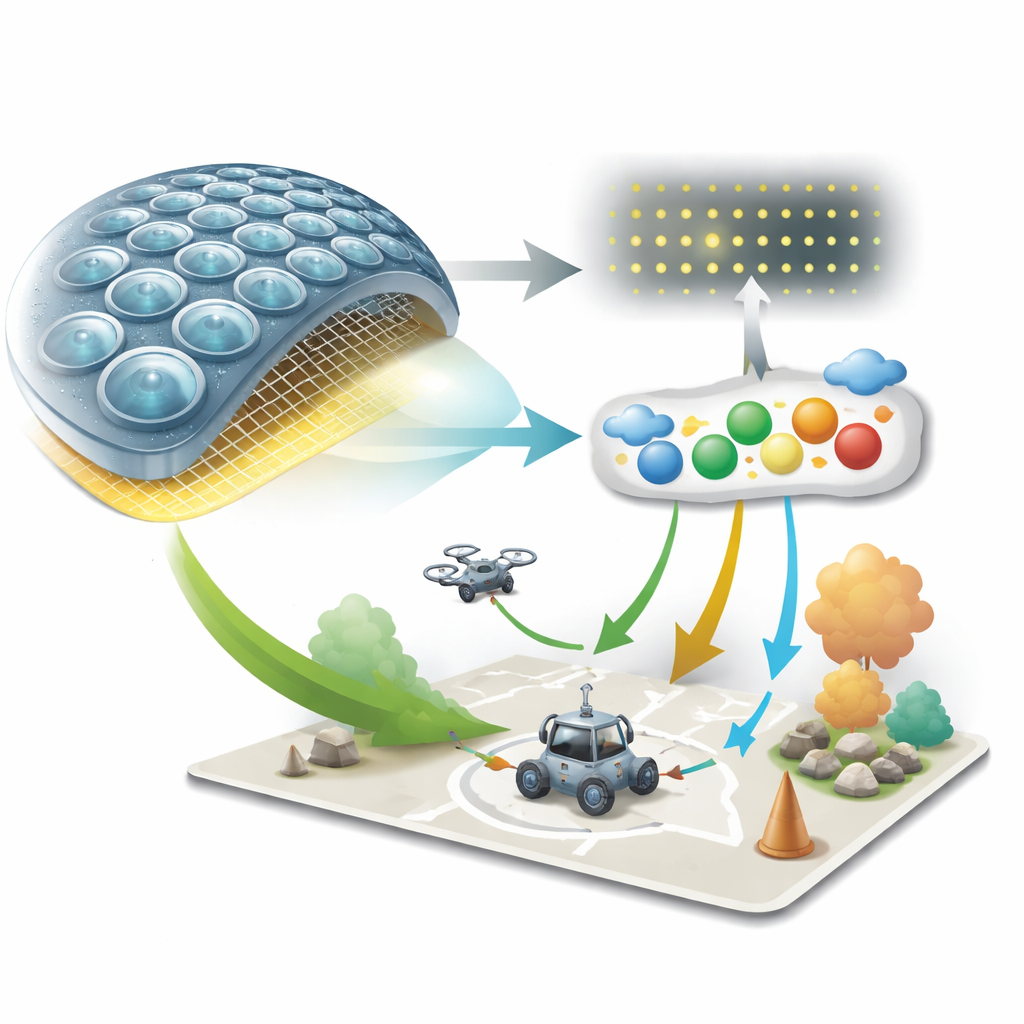
A equipe construiu um olho artificial cilíndrico com cerca do tamanho da cabeça de um pequeno inseto, acomodando 1.027 pequenas lentes em um quadrado de apenas 1,5 milímetro de lado. Usando uma técnica de impressão 3D ultraprécisa, eles imprimiram diretamente uma matriz microlente curva sobre uma camada flexível de detectores orgânicos de luz. Cada lente se alinha com um único detector, formando um “pixel” individual que observa em sua própria direção, muito parecido com um omatídio de inseto. As lentes foram projetadas com um ângulo de aceitação estreito para que a luz de uma direção não vaze para pixels vizinhos, imitando de perto o isolamento ótico natural em olhos compostos reais. Para lidar com neblina e umidade, os pesquisadores adicionaram estruturas microscópicas semelhantes a pelos entre as lentes que ajudam a evitar a condensação de gotas na superfície, semelhante aos pelos autolimpantes em torno dos olhos de insetos reais.
Ver movimento e sentir o ar em tempo real
Sob as lentes fica uma camada sensível à luz especialmente projetada, feita de uma mistura de semicondutores orgânicos e pontos quânticos de sulfeto de chumbo. Essa combinação permite que o dispositivo detecte luz do ultravioleta ao visível até o infravermelho próximo, respondendo em cerca de um dezmilésimo de segundo—rápido o suficiente para uma taxa de fusão de cintilação em torno de 1.000 imagens por segundo. Em vez de formar imagens nítidas e detalhadas, o dispositivo registra pontos brilhantes em mudança por seu amplo campo de visão, que um modelo matemático simples converte em informações sobre onde estão os objetos, quão distantes podem estar e como se movem. Em paralelo, uma matriz colorimétrica impressa por jato de tinta atua como um nariz artificial: minúsculos pontos contendo complexos metálicos e corantes sensíveis ao pH mudam de cor quando expostos a gases perigosos específicos. Um algoritmo leve de hashing inspirado em moscas então transforma essas mudanças de cor na identidade do gás e em uma concentração aproximada, com cerca de 93% de precisão entre dez vapores tóxicos comuns.
Do banco de laboratório a robôs móveis e drones
Para demonstrar que esse “olho-e-nariz” em escala de inseto é útil fora do laboratório, os pesquisadores o montaram em duas pequenas plataformas não tripuladas. Em um robô com rodas omnidirecionais, o olho curvo permitiu que o sistema observasse um campo horizontal de 180 graus e detectasse movimento rápido o suficiente para desviar de obstáculos que se aproximavam, mesmo em condições de neblina. Regras simples implementadas em hardware—novamente inspiradas no comportamento de fuga dos insetos—permitiram que o robô recuasse de objetos que se aproximavam ou os contornasse enquanto se deslocava. Em um pequeno drone, o mesmo dispositivo rastreou a posição de luzes em movimento em três dimensões e, junto com o sensor de gás, guiou a exploração autônoma por um ambiente de teste contendo fontes de luz e plumas de produtos químicos perigosos. Informações visuais e olfativas foram combinadas para que o drone tanto seguisse alvos quanto mapeasse gases perigosos no espaço.
Por que isso importa para máquinas pequenas do futuro
Este trabalho mostra que é possível integrar visão em ângulo amplo e alta velocidade e sensoriamento químico em um sensor do tamanho aproximado do olho de um inseto real. O dispositivo sacrifica detalhes finos da imagem em favor da sensibilidade ao movimento, cobertura espectral ampla e eficiência energética—exatamente as compensações que importam para drones e robôs minúsculos com recursos limitados de energia e computação. Ao unir “olhos” e “nariz” em um sistema compacto e ao emprestar estratégias de fusão do cérebro de insetos, o estudo aponta para enxames futuros de máquinas autônomas pequenas e de baixo custo que podem desviar de obstáculos, reconhecer gases perigosos e explorar ambientes complexos com a agilidade de insetos voadores.
Citação: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
Palavras-chave: olho composto biónico, robótica bioinspirada, sensoriamento multimodal, sistemas de microvisão, detecção de gases perigosos