Clear Sky Science · pt
Salto robótico ampliado por hipogravidade induzida por empuxo, alcançando pulos precisos, previsíveis e estendidos
Robôs que Podem Saltar Como se Estivessem na Lua
Imagine um robô de resgate que pode pular sobre muros, saltar riachos ou atravessar uma janela em movimento sem errar o ponto de pouso por mais de um centímetro. Este artigo descreve um novo tipo de máquina saltadora que faz exatamente isso ao se dar brevemente uma “baixa gravidade”, semelhante a estar na Lua ou em Plutão, mantendo seus saltos precisos e previsíveis.
Por que os Robôs Saltadores Têm Dificuldade Hoje
Animais como gafanhotos arbóreos ou sapos podem saltar longe, pousar em poleiros estreitos e ajustar-se no ar quando algo muda. A maioria dos robôs não consegue. Robôs saltadores tradicionais enfrentam um trade-off: eles podem saltar muito longe usando molas fortes ou motores potentes, ou podem pousar com precisão e segurança, mas raramente conseguem ambos. Projetos com “catapultas” carregadas por molas armazenam muita energia, mas demoram a recarregar e são difíceis de controlar uma vez no ar. Pernas acionadas diretamente por motores são mais fáceis de controlar, mas não têm o estouro de potência necessário para saltos muito altos. Asas ou rotores adicionados podem ampliar o tempo de voo, mas muitas vezes tornam a trajetória confusa e imprevisível, o que é um problema se for preciso atingir um alvo pequeno ou desviar de obstáculos em movimento.
Simulando Baixa Gravidade com Empuxo de Ar
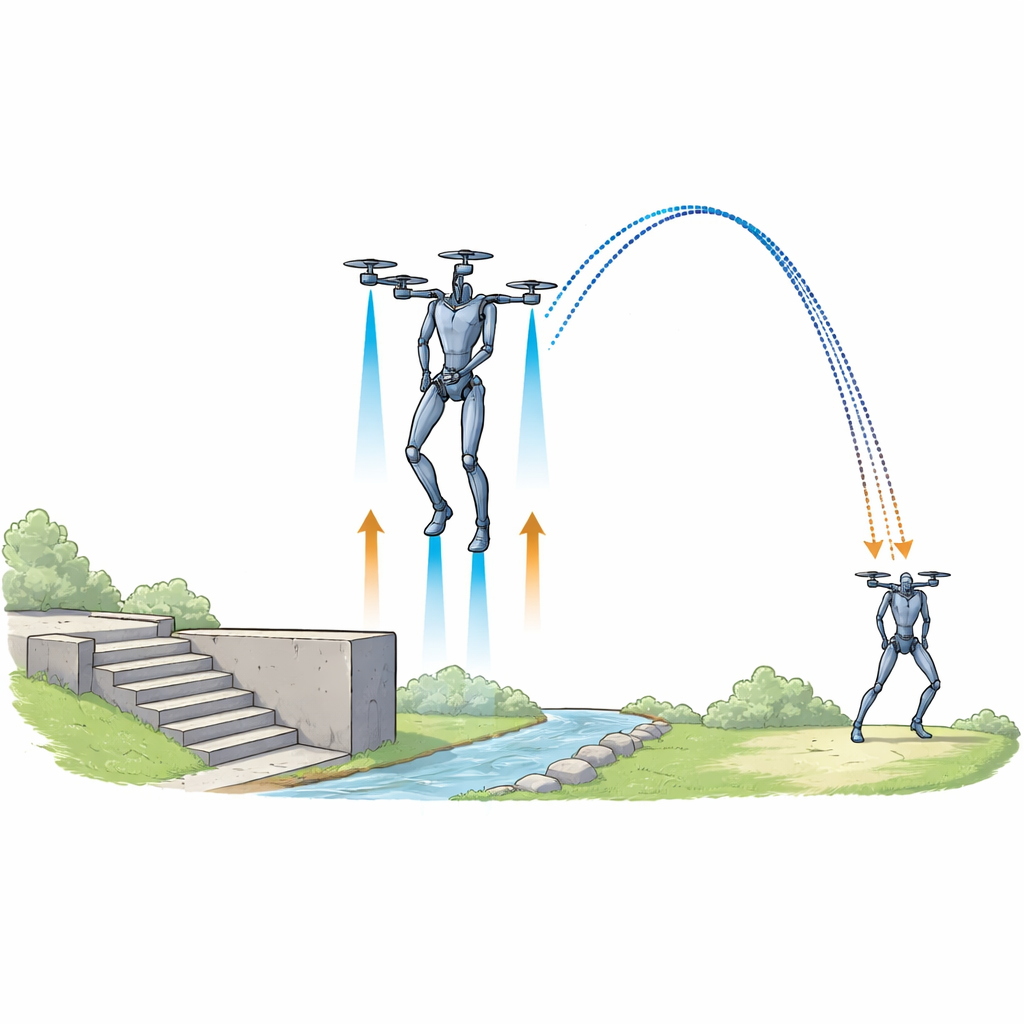
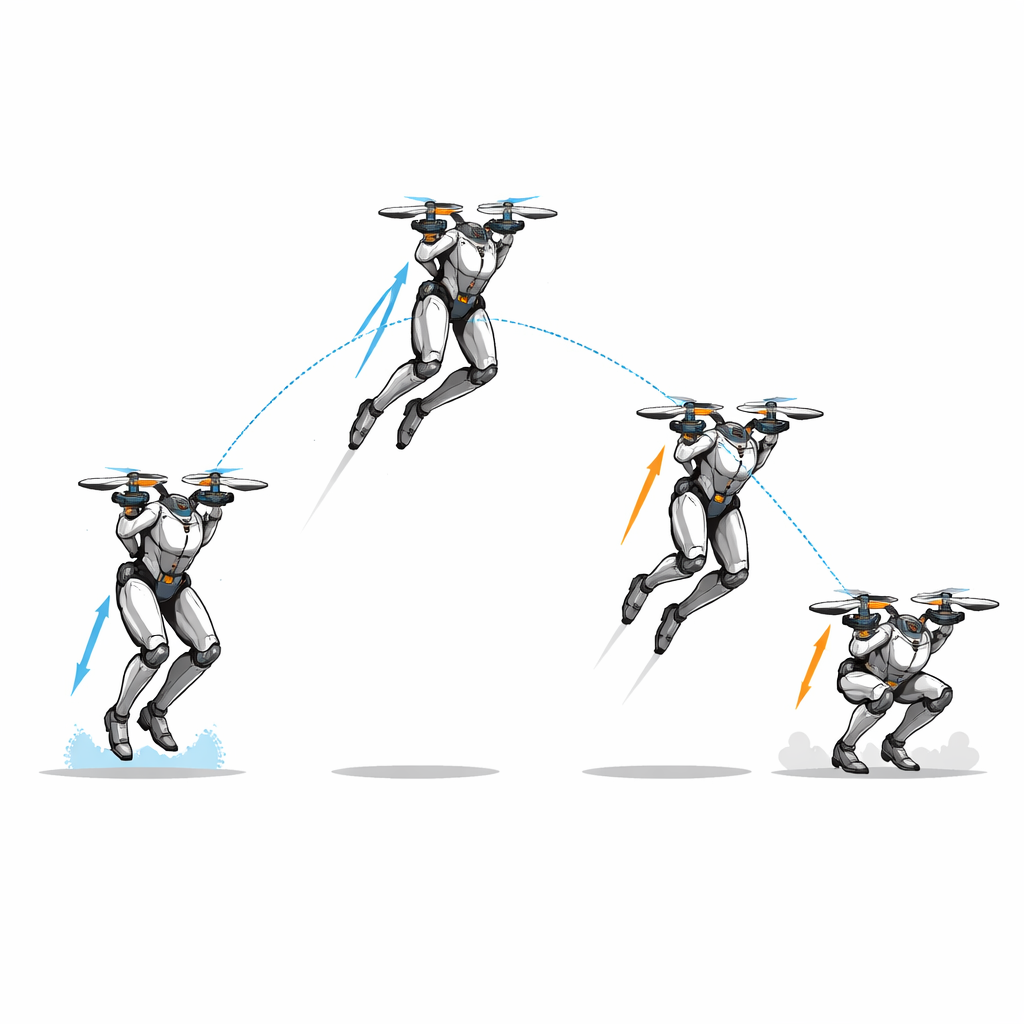
Os pesquisadores construíram um robô bípedo de 370 gramas chamado GravOff que evita esse trade-off criando seu próprio ambiente de baixa gravidade. O robô tem um par de pernas longas, semelhantes às de insetos, acionadas diretamente por motores, além de quatro pequenos propulsores montados em uma estrutura larga. Durante um salto, as pernas dão um impulso rápido no solo para alcançar uma alta velocidade de decolagem. Ao mesmo tempo, os propulsores empurram para cima o suficiente para cancelar parte da gravidade terrestre, uma condição que os autores chamam de hipogravidade induzida por empuxo. Como a “gravidade efetiva” é menor, a mesma potência nas pernas leva o robô a uma parábola muito mais alta e longa — chegando a 6,9 metros de altura, cerca de 46 vezes sua altura corporal — comparável aos melhores saltadores de recorde, mas com velocidades de decolagem e aterrissagem mais suaves.
Desenhando e Guiando a Arco Perfeita
O que torna o GravOff especialmente incomum não é apenas o quão longe ele salta, mas quão precisamente segue um caminho escolhido. A equipe trata cada salto como uma arco com tempos marcados, onde posição e tempo estão vinculados como pontos em uma parábola desenhada. Usando sensores e um algoritmo de controle preditivo, o robô compara seu movimento real no ar com essa curva de referência dezenas de vezes por segundo e inclina levemente seus rotores para se corrigir. Crucialmente, os propulsores podem girar independentemente da inclinação do corpo do robô, então ele pode direcionar seu empuxo sem precisar inclinar toda a estrutura, mantendo separadas a estabilidade e a direção. Esse controle duplo permite que o GravOff pouse dentro de um quadrado de apenas 25 centímetros de lado com repetibilidade em nível de milímetro, mesmo quando o ângulo de decolagem está errado em até 15 graus ou quando um ventilador forte sopra com vento de 3,5 metros por segundo durante o voo.
Aterrissagens Macias e Estáveis Sem Ressalto
Saltos altos costumam significar aterrissagens duras, que podem danificar o hardware ou fazer o robô capotar. O GravOff resolve isso com dois modos de aterrissagem. Para impactos especialmente fortes, um amortecedor macio impresso em 3D em cada perna ajuda a absorver energia. Para pousos precisos em alvos pequenos ou em movimento, o robô recolhe ativamente as pernas e depois as estende no momento exato, alongando o tempo de contato com o solo. Essa “amortização ativa” reduz as forças de impacto por um fator de quatro em comparação com pousos passivos e cancela quase completamente o momento de chegada, de modo que o robô para no primeiro toque em vez de quicar para longe.
De Saltos em Laboratório a Missões no Mundo Real
Além de testes controlados em ambiente interno, os autores mostram que o GravOff pode combinar saltos com rastejamento e deslocamento com rodas para lidar com terrenos reais. Ele pode rastejar lentamente sobre grama, areia, paralelepípedos e pisos sulcados para alinhar uma pose de decolagem segura, então usar saltos em hipogravidade para transpor obstáculos como escadarias em vários degraus, um muro de 2,35 metros de altura ou um riacho de três metros de largura. A estratégia de salto em baixa gravidade também se mostra muito mais eficiente em energia do que voo puro para ultrapassar obstáculos de tamanho médio: em alguns testes, os saltos usaram menos de um décimo da energia total necessária para pairar ou voar sobre a mesma barreira.
O que Isso Significa para Robôs do Futuro
Em termos simples, este trabalho mostra que robôs podem saltar mais longe, com mais precisão e mais segurança ao fingirem que a gravidade é mais fraca e ao ajustarem sua trajetória após a decolagem. O projeto do GravOff sugere futuros exploradores que poderiam pular sobre destroços durante operações de resgate ou transpor penhascos e crateras em outros planetas, tudo enquanto prevêem exatamente onde e quando vão pousar. As mesmas ideias — compensar a gravidade com empuxo e direcionar a arcada no meio do voo — poderiam ser adicionadas a muitos outros robôs saltadores, potencialmente transformando o salto em um modo de deslocamento confiável e planejado, em vez de um recurso arriscado de último recurso.
Citação: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Palavras-chave: robôs saltadores, hipogravidade, vetorização de empuxo, locomoção com pernas, controle de trajetória