Clear Sky Science · pt
Arquitetura espiculada bioinspirada permite codificação tátil com restrição de energia
Por que um toque mais inteligente importa para robôs
Nas pontas dos nossos dedos conseguimos sentir um grão de areia, um copo escorregando ou uma leve batida em frações de segundo, tudo isso consumindo muito pouca energia. À medida que robôs saem das fábricas e entram em casas, hospitais e ambientes de trabalho cheios de pessoas, eles precisarão de um sentido tátil semelhante para interagir com segurança com pessoas e objetos frágeis. Este estudo apresenta uma nova pele artificial e um sistema de processamento inspirado no cérebro que permite às máquinas detectar com alta precisão onde estão sendo tocadas, mantendo o consumo de energia extremamente baixo — um requisito-chave para futuros robôs móveis e colaborativos.
Uma pele flexível que sente como a nossa
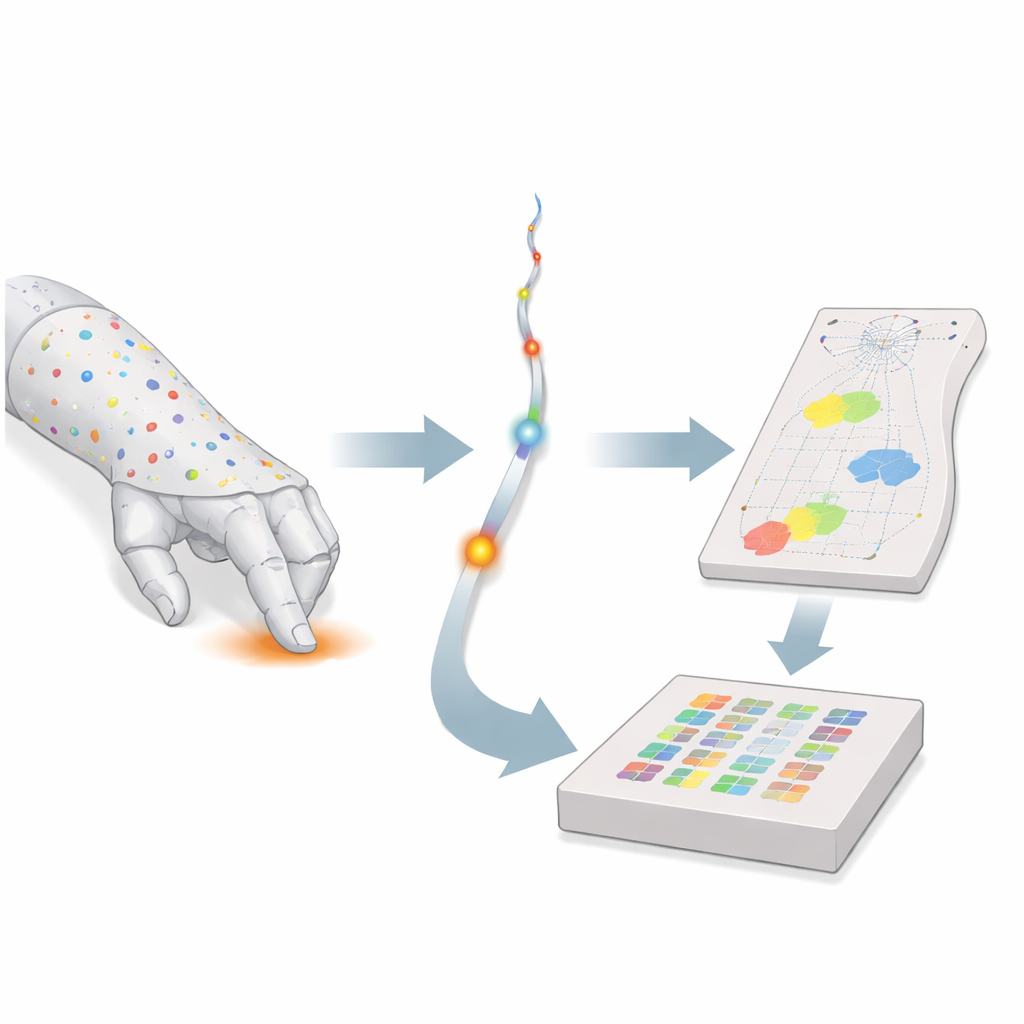
Os pesquisadores construíram uma “e-pele” macia de silicone, em formato de antebraço humano, e a enredaram com 21 pequenos sensores ópticos ao longo de uma única fibra finíssima. Esses sensores, chamados de Fiber Bragg Gratings, respondem ao estiramento e à flexão da pele deslocando a cor da luz refletida dentro da fibra. Como a fibra serpenteia sob a superfície, cada sensor é sensível não apenas a um ponto único, mas a uma pequena região — muito parecido com os receptores táteis reais distribuídos pela nossa pele. Alguns desses receptores artificiais reagem fortemente a pressões muito localizadas, enquanto outros respondem de forma mais ampla às deformações, ecoando como diferentes terminações nervosas na pele humana capturam tanto detalhes finos quanto a forma geral.
Convertendo o toque em pulsos elétricos
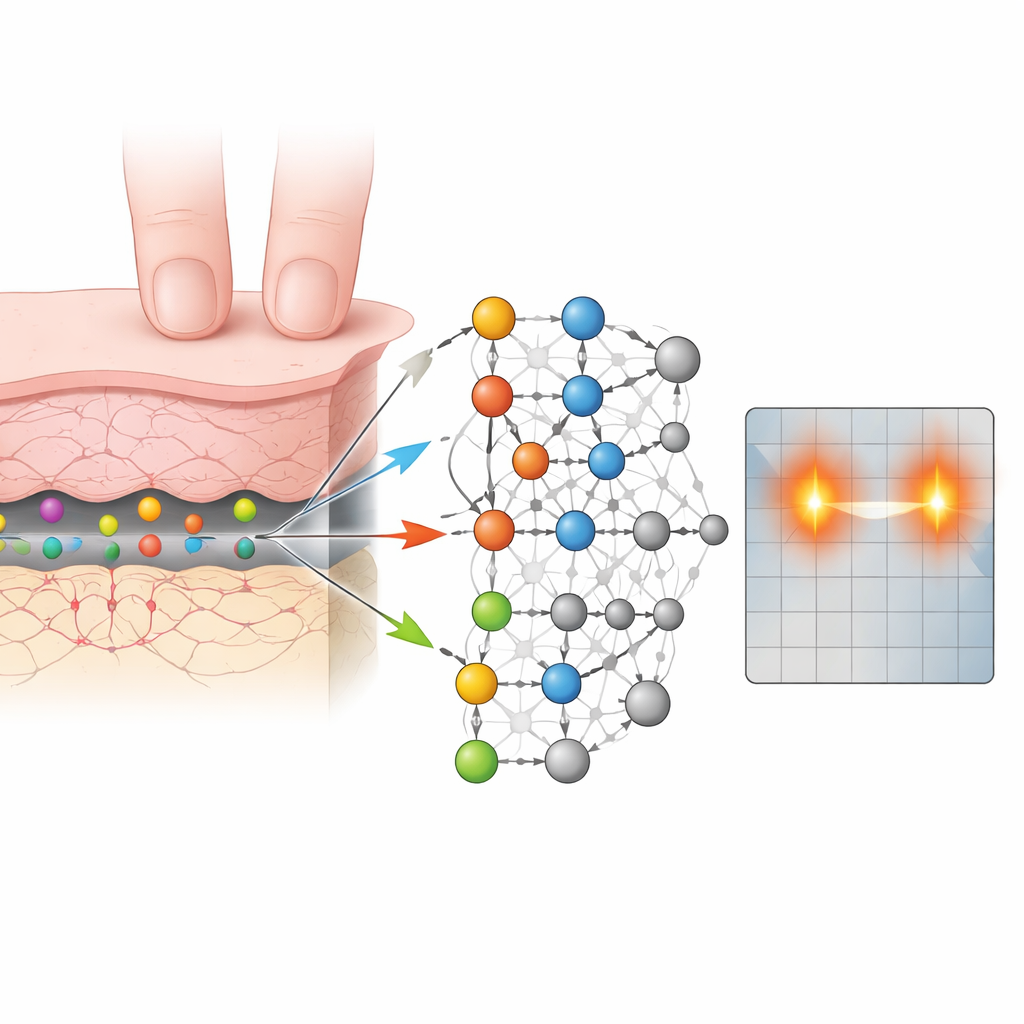
Para interpretar esse fluxo rico de dados, a equipe não recorreu a modelos convencionais de deep learning que processam quadros numéricos. Em vez disso, imitaram a biologia mais de perto usando uma rede neural espiculada, onde a informação viaja como breves pulsos elétricos, ou “espículas”, semelhantes a impulsos nervosos. Os sinais ópticos da e-pele são convertidos em fluxos de espículas e enviados para a rede. Cada neurônio de saída nessa rede representa um ponto específico na pele, formando um mapa interno bidimensional da superfície. Quando algo toca a e-pele, um aglomerado de neurônios dispara em um padrão que revela onde ocorreu o contato, e o sistema calcula a localização do toque a partir do centro dessa atividade.
Toque mais preciso com menos recursos
Com esse projeto, o sistema localiza pontos de toque único no antebraço artificial com um erro típico de cerca de três milímetros, superando uma forte linha de base de deep learning por aproximadamente um terço e alcançando cerca de dez vezes melhor resolução espacial do que seria esperado apenas pelo espaçamento entre sensores. Também funciona quando vários pontos são pressionados ao mesmo tempo — até quatro contatos simultâneos — e quando as pressões são aplicadas manualmente com forças e direções variadas. Os pesquisadores testaram diferentes padrões de conexão interna na rede e descobriram que um arranjo inspirado nas vias táteis iniciais da medula espinhal — onde células excitatórias alimentam interneurônios inibitórios que suprimem saídas vizinhas — é crucial para afiar o detalhe espacial. Essa “inibição lateral” ajuda a manter a representação nítida, evitando borrões quando os contatos estão próximos.
Projetado para baixa energia, não apenas precisão
Um objetivo central do trabalho é controlar o consumo de energia, uma questão que se torna crítica se todo o corpo de um robô for coberto de sensores. A equipe treinou a rede sujeita a uma pressão crescente para disparar menos espículas, imitando a necessidade evolutiva de trocar desempenho bruto por custo metabólico. Em condições sem restrição, uma arquitetura mais flexível e menos biologicamente realista teve desempenho ligeiramente melhor. Mas, quando a atividade de espículas foi reduzida a níveis energeticamente eficientes, o layout bioinspirado venceu — entregando maior precisão com o mesmo orçamento de atividade. Os pesquisadores então portaram essa rede para um chip neuromórfico misto-sinal que implementa neurônios e sinapses diretamente em eletrônica analógica. Neste hardware, o sistema tátil operou em potência sub-miliwatt durante o toque e apenas alguns microwatts em repouso, com perda mínima de precisão.
Dos antebraços de laboratório aos corpos robóticos do futuro
No conjunto, este trabalho mostra que combinar cuidadosamente sensoriamento macio e distribuído com computação espiculada semelhante ao cérebro pode dar às máquinas um sentido de toque preciso e rápido sem uma conta de energia pesada. Ao corresponder não apenas o desempenho, mas também os princípios de fiação das vias táteis iniciais do sistema nervoso, o sistema sugere por que a evolução pode ter favorecido certos motivos de circuito: eles fornecem precisão suficiente sob limites estritos de energia. Em escala maior, e-peles e processadores neuromórficos semelhantes poderiam permitir que robôs e próteses sintam contatos por suas superfícies, reajam rapidamente a colisões inesperadas e interajam com mais segurança e naturalidade nos ambientes complexos e dinâmicos onde humanos vivem e trabalham.
Citação: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Palavras-chave: pele artificial, sensoriamento tátil, redes neurais espiculadas, hardware neuromórfico, segurança em robótica