Clear Sky Science · pt
Treinando sensores táteis para aprender detecção de força uns com os outros
Robôs que Podem Sentir e Compartilhar seu Sentido do Toque
À medida que robôs saem das fábricas e entram em casas, hospitais e depósitos, eles precisam de um sentido que normalmente damos como certo: o toque. Assim como nossos dedos se ajustam automaticamente quando seguramos uma batata frita versus uma caixa pesada, robôs do futuro devem aprender com que força apertar e quando um objeto está prestes a escorregar. Este artigo apresenta uma nova forma de “pele” robótica aprender detecção de força com outras peles, reduzindo calibrações caras e aproximando as máquinas da destreza humana.
Por que o Toque Robótico é Tão Difícil de Acertar
Robôs modernos já contam com vários tipos de pele artificial. Algumas usam pequenas câmeras olhando dentro de géis macios, outras se apoiam em ímãs ou em grades eletrônicas que detectam pressão. Cada projeto se destaca em certas tarefas, mas todos falam “dialetos” diferentes do toque: a mesma pressão em dois sensores pode produzir sinais bem distintos. Hoje, todo novo sensor normalmente precisa de um processo de treinamento trabalhoso com medidores de força precisos, repetido milhares de vezes. Pior ainda, materiais macios envelhecem e se desgastam, então essa calibração cara precisa ser refeita sempre que um sensor é substituído.
Pegando uma Páginas do Cérebro Humano
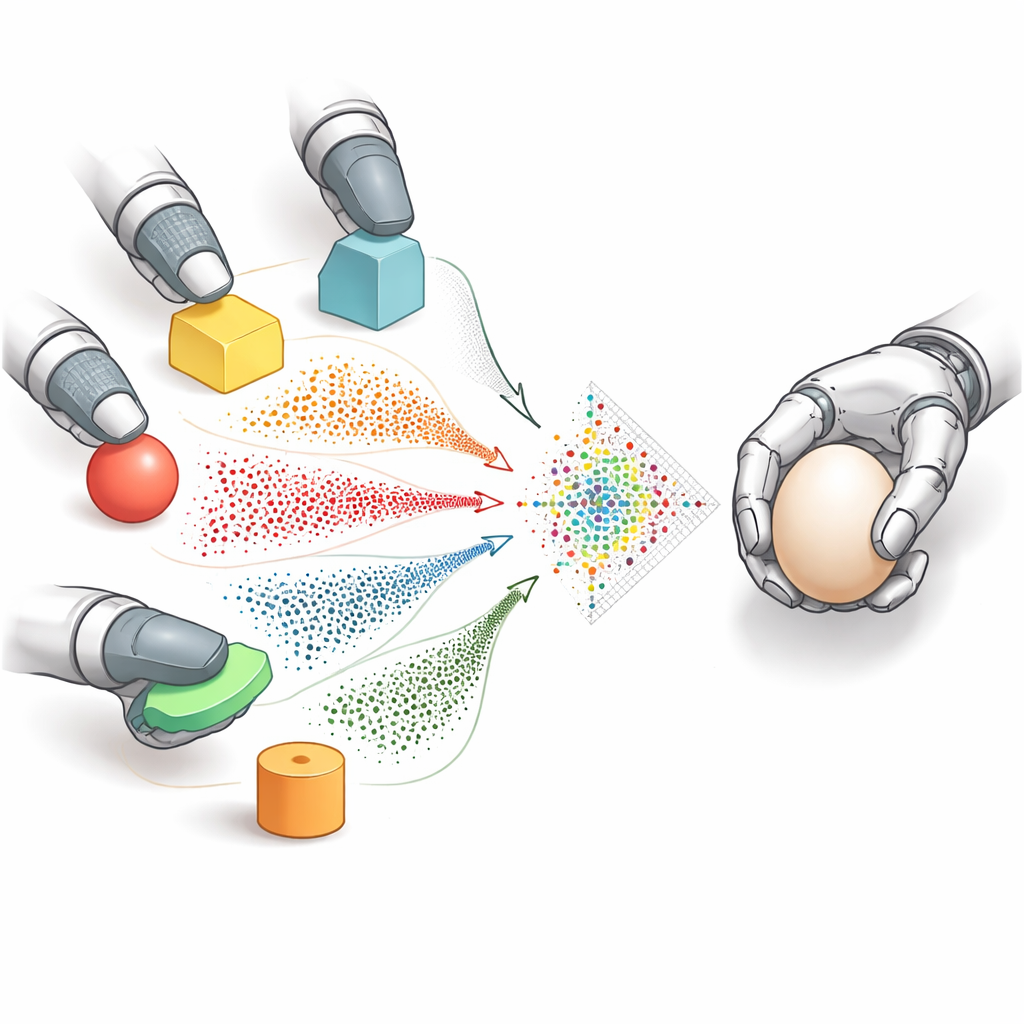
Os humanos resolvem um problema semelhante com facilidade. Nossa pele é preenchida por diferentes tipos de receptores táteis, e o cérebro converte todos esses sinais em um código interno compartilhado. Essa memória tátil unificada nos permite estimar como algo sentiria em uma parte da mão que nunca tocou aquilo antes, simplesmente com base em experiências passadas. Os pesquisadores por trás deste trabalho imitam essa ideia em robôs. Eles convertem todas as saídas dos sensores — imagens de câmeras, leituras magnéticas ou sinais eletrônicos — em uma forma comum parecida com imagem composta por pontos, que representam como a pele está se deformando. Essa representação compartilhada de marcadores atua como uma “língua do toque” simples que qualquer sensor pode usar.
Ensinando um Sensor a Imitar Outro
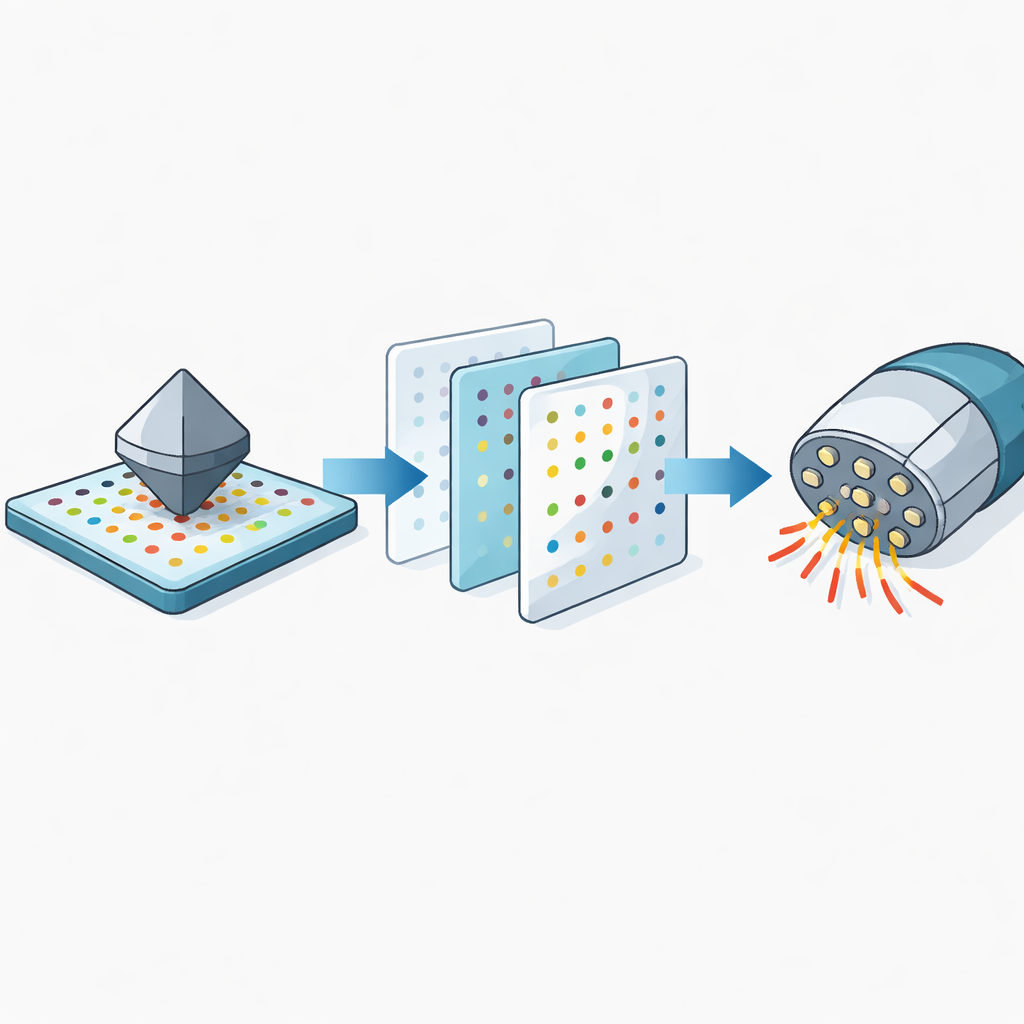
Uma vez que todos os sensores falam essa linguagem baseada em pontos, a equipe introduz um passo de tradução chamado tradução marcador-para-marcador. Usando modelos generativos poderosos, eles treinam um sistema que pode transformar o padrão de pontos de um sensor no padrão que um sensor diferente teria exibido sob o mesmo contato. Isso significa que um sensor bem calibrado pode efetivamente “imaginar” o que um sensor não calibrado sentiria e gerar dados de treinamento sintéticos para ele. Um segundo modelo então analisa sequências curtas dessas imagens de pontos para prever como as forças mudam ao longo do tempo em três direções, levando em conta tanto empurrões quanto cisalhamentos laterais.
Lidando com Diferenças do Mundo Real em Peles macias
Na prática, peles robóticas diferentes não são apenas desenhadas e cabeadas de forma distinta; também são feitas de materiais que podem ser mais macios ou mais rígidos, e que mudam com o tempo. Essas diferenças podem distorcer estimativas de força mesmo que os padrões pareçam similares. Os pesquisadores medem como cada tipo de material macio se deforma sob carga e constroem um passo simples de correção que escala os rótulos de força para cima ou para baixo antes do treinamento. Essa compensação de material reduz bastante os erros, especialmente ao transferir conhecimento entre peles muito macias e muito rígidas.
Do Banco de Laboratório à Manipulação do Dia a Dia
A equipe testa seu método, chamado GenForce, em uma ampla mistura de sensores, desde várias cópias do mesmo módulo baseado em câmera até designs muito diferentes que usam ímãs ou formas curvas semelhantes a pontas de dedo. Em mais de 200 combinações em simulação e em hardware, o GenForce reduz fortemente os erros de predição em comparação com reaproveitar simplesmente um modelo treinado em outro sensor. Em demonstrações, uma mão robótica equipada com peles táteis diferentes em cada dedo usa modelos transferidos para segurar delicadamente itens frágeis como frutas e batatas fritas, e para detectar e corrigir objetos que escorregam coordenando as leituras de ambos os lados da preensão.
O Que Isso Significa para o Futuro das Mãos Robóticas
Ao permitir que sensores táteis aprendam detecção de força uns com os outros em vez de começar do zero, o GenForce aponta para mãos robóticas mais fáceis e baratas de implantar em escala. Um único sensor cuidadosamente calibrado poderia treinar muitos outros, mesmo de designs diferentes, e modelos pré-treinados poderiam ser ajustados com apenas uma pequena quantidade de novos dados. Para não especialistas, a conclusão é simples: este trabalho torna mais prático para robôs perceberem com que força estão apertando e responderem rapidamente quando objetos começam a escorregar, aproximando-nos de máquinas que manipulam o mundo real com o mesmo toque confiante das mãos humanas.
Citação: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
Palavras-chave: toque robótico, sensores táteis, detecção de força, manipulação robótica, aprendizado por transferência