Clear Sky Science · pt
Um robô em escala de inseto com pernas paralelas baseado em mecanismo origami que integra atuação e estrutura
Robôs pequenos para espaços apertados
Imagine um robô de resgate suficientemente pequeno e leve para escorregar por uma parede rachada, rastejar por um cano estreito ou até nadar através de uma poça d’água. Este artigo apresenta essa máquina: um robô do tamanho da palma da mão, semelhante a um inseto, chamado PLioBot, feito a partir de uma única folha dobrada, que se move muito rápido para seu tamanho e lida com vários tipos de terreno acidentado. Os pesquisadores mostram como combinar dobras inteligentes com minúsculos motores vibratórios pode transformar materiais planos em exploradores ágeis para locais apertados e de difícil acesso.
Da folha plana ao rastejador de quatro pernas
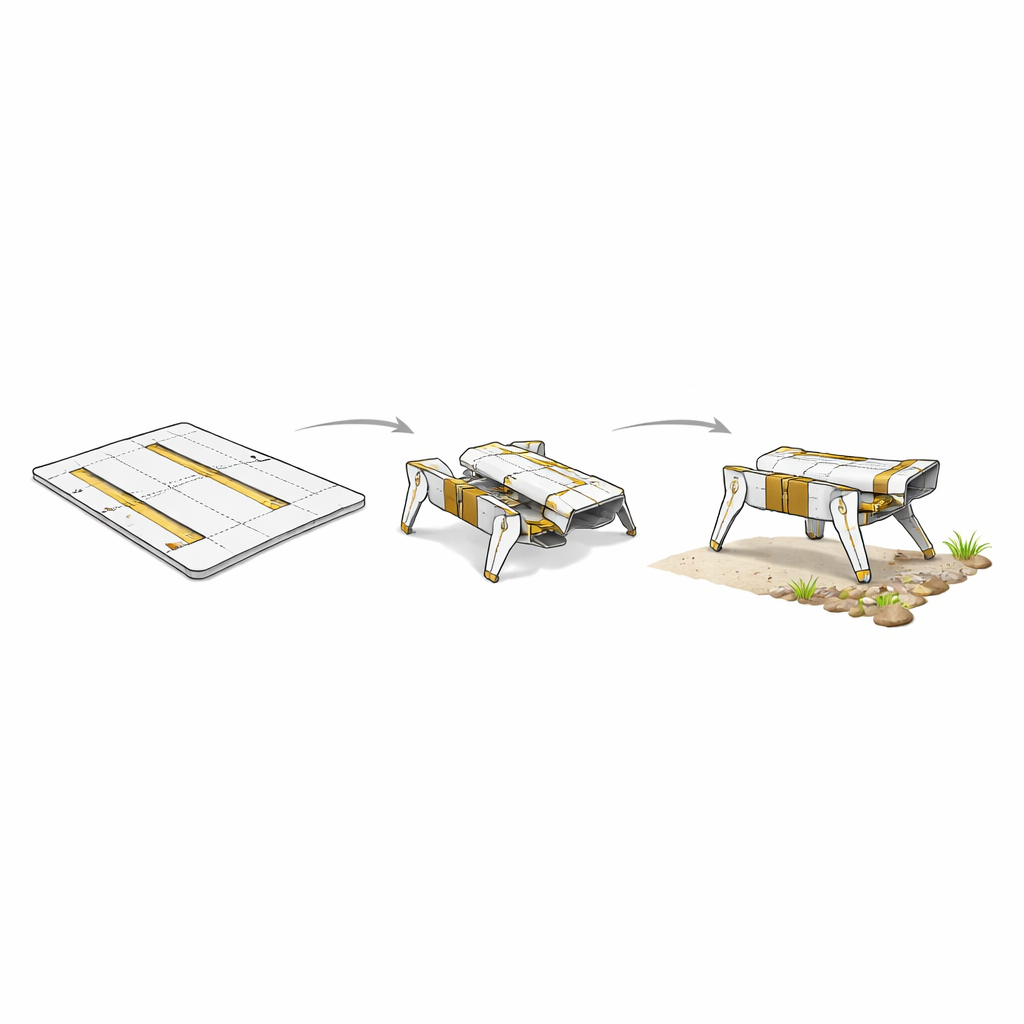
O PLioBot nasce como um padrão plano, muito parecido com um brinquedo recortado e dobrado. Em vez de papel, o padrão é um sanduíche de cinco camadas de fibra de vidro, fibra de carbono, um filme plástico flexível e tiras de cerâmica piezoelétrica que funcionam como músculos. Regiões finas precisamente posicionadas na camada plástica servem como articulações. Após o corte a laser, toda a estrutura é dobrada numa sequência coreografada de modo que o corpo, as quatro pernas e os oito atuadores surgem a partir de uma peça contínua. Sem parafusos, sem motores separados e sem alinhamento manual — apenas a dobra produz um robô completo com cerca de 2,5 centímetros de comprimento e pesando apenas 1,2 gramas.
Como as perninhas minúsculas dão grandes passos
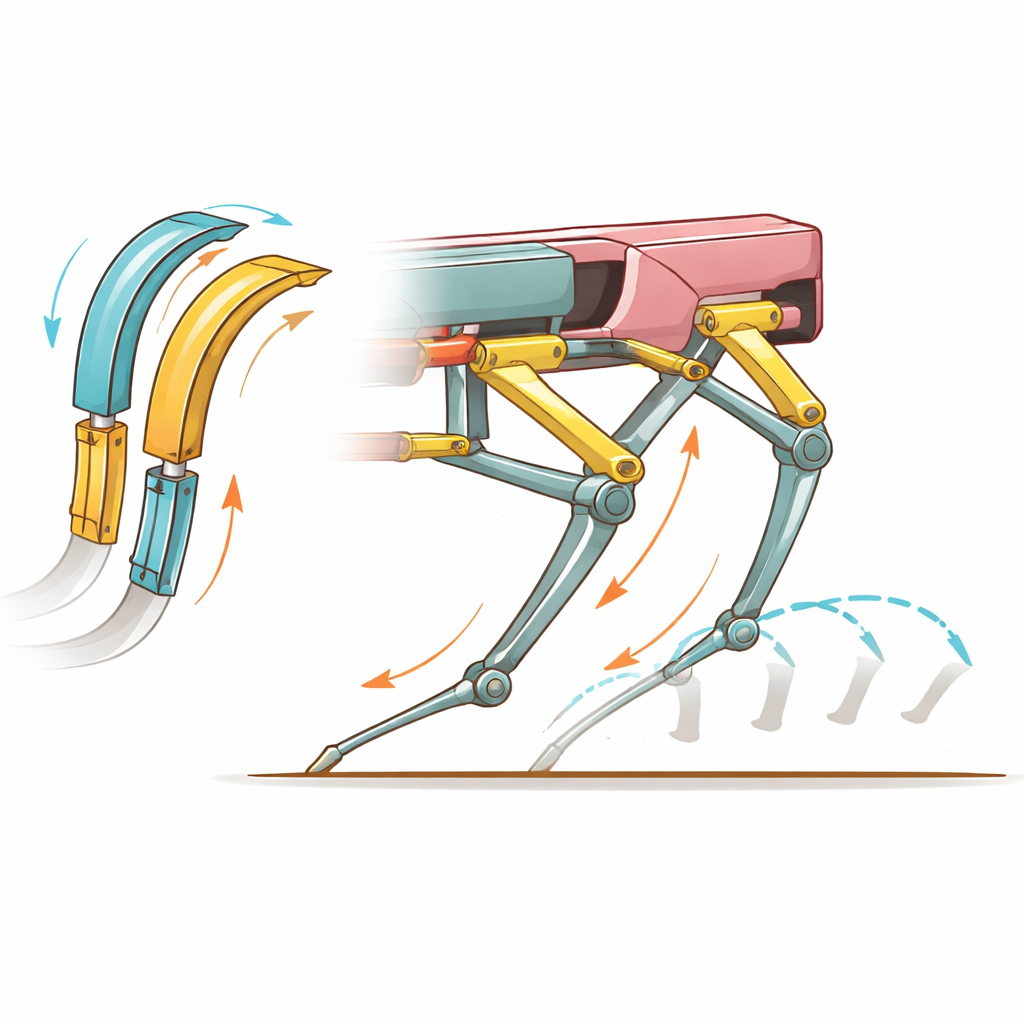
O movimento do robô vem de cerâmicas piezoelétricas — materiais que se curvam levemente quando uma tensão elétrica é aplicada. Cada lado do PLioBot carrega um par de atuadores em tira "gêmeos". Quando tensões alternadas fazem essas tiras dobrarem-se para frente e para trás, seu movimento é transmitido por um conjunto de hastes articuladas que atuam como um mecanismo de perna paralela em miniatura. Ao sincronizar cuidadosamente os sinais, cada perna pode mover-se para cima e para baixo, bem como para frente e para trás, descrevendo um caminho em laço com seu pé. Coordenar as quatro pernas num padrão semelhante a um galope permite que o robô empurre o chão de forma eficiente e dispare para a frente. Em suas melhores configurações, o PLioBot atinge 44,6 centímetros por segundo — cerca de 18 comprimentos de corpo por segundo — tornando‑o um dos robôs com pernas mais rápidos nessa escala.
Músculos embutidos, menos complicação na montagem
A maioria dos robôs em escala de inseto é montada meticulosamente a partir de muitas peças minúsculas: motores ou atuadores separados, estruturas e articulações que devem ser alinhadas manualmente. Isso aumenta o custo, limita a precisão e dificulta a produção em massa. Os autores enfrentam isso integrando totalmente a estrutura e a atuação em um único "mecanismo origami". Eles usam um processo refinado de laminação no qual todas as camadas — revestimentos rígidos de fibra de vidro, eletrodos de fibra de carbono ortogonais, o filme flexível das articulações e as tiras cerâmicas — são cortadas, empilhadas, alinhadas por furos-guia e prensadas a quente antes do contorno final ser liberado a laser. O resultado é uma placa plana robusta que já contém o esqueleto, as juntas e os músculos do robô em suas posições finais, pronta para ser dobrada em forma.
Andar, subir e nadar em terrenos do mundo real
Para testar se o projeto é útil fora do banco de laboratório, a equipe submeteu o PLioBot a uma variedade de obstáculos do dia a dia. Em vidro liso ele corre o risco de escorregar, mas ainda se move rapidamente; em esponja e acrílico ganha tração à custa de um pouco de velocidade. Sobe rampas de até 12 graus e pode carregar cargas úteis mais pesadas que ele próprio — até 1,7 gramas, com desempenho especialmente bom abaixo de cerca de 0,8 grama. Em túneis estreitos com apenas 3 centímetros de largura e menos de 3 centímetros de altura, o robô transporta uma carga de 1,4 grama mantendo vários comprimentos de corpo por segundo. Ao trocar por coxins hemisféricos nos pés ou pás em forma de nadadeira, o PLioBot atravessa cascalho e grama, atravessa areias móveis sem afundar, anda pelo fundo de um tanque e até nada na superfície da água usando apenas suas nadadeiras para gerar propulsão.
O que isso significa para futuros pequenos exploradores
Em termos simples, este trabalho mostra que é possível imprimir e dobrar um robô muito pequeno cujo corpo e músculos são uma peça única, e que esse robô pode mover‑se rápido e lidar com muitas superfícies reais e bagunçadas. O PLioBot ainda depende de fios de alimentação externos, portanto não é totalmente independente. Mas o design origami integrado e o método de fabricação apontam para um futuro em que grandes quantidades de robôs baratos em escala de inseto poderiam ser produzidas como peças planas, dobradas em forma e equipadas com baterias e circuitos de controle em miniatura. Esses enxames poderiam um dia vasculhar edifícios danificados, inspecionar tubulações industriais ou explorar outros planetas — tudo começando por algo que, a princípio, se parece com uma folha inteligentemente recortada.
Citação: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Palavras-chave: robôs em escala de inseto, robótica origami, atuadores piezoelétricos, locomoção adaptativa ao terreno, fabricação de microrrobôs