Clear Sky Science · pt
Atuadores de ligas com memória de forma em fio: modelagem, projeto e controle
Fios Metálicos que “Lembram” Sua Forma
Imagine um fio metálico fino que pode puxar como um músculo, dobrar silenciosamente o dedo de um robô, remodelar a asa de um avião em voo ou apertar delicadamente um coração em falha — tudo apenas aquecendo e resfriando-o. Este artigo de revisão analisa esses fios, feitos de ligas com memória de forma (LMF), e explica como funcionam, como engenheiros os projetam e controlam, e onde já estão encontrando uso real em robôs, aeronaves, dispositivos médicos e tecnologia vestível.
Como Fios Metálicos Inteligentes Ganham Vida
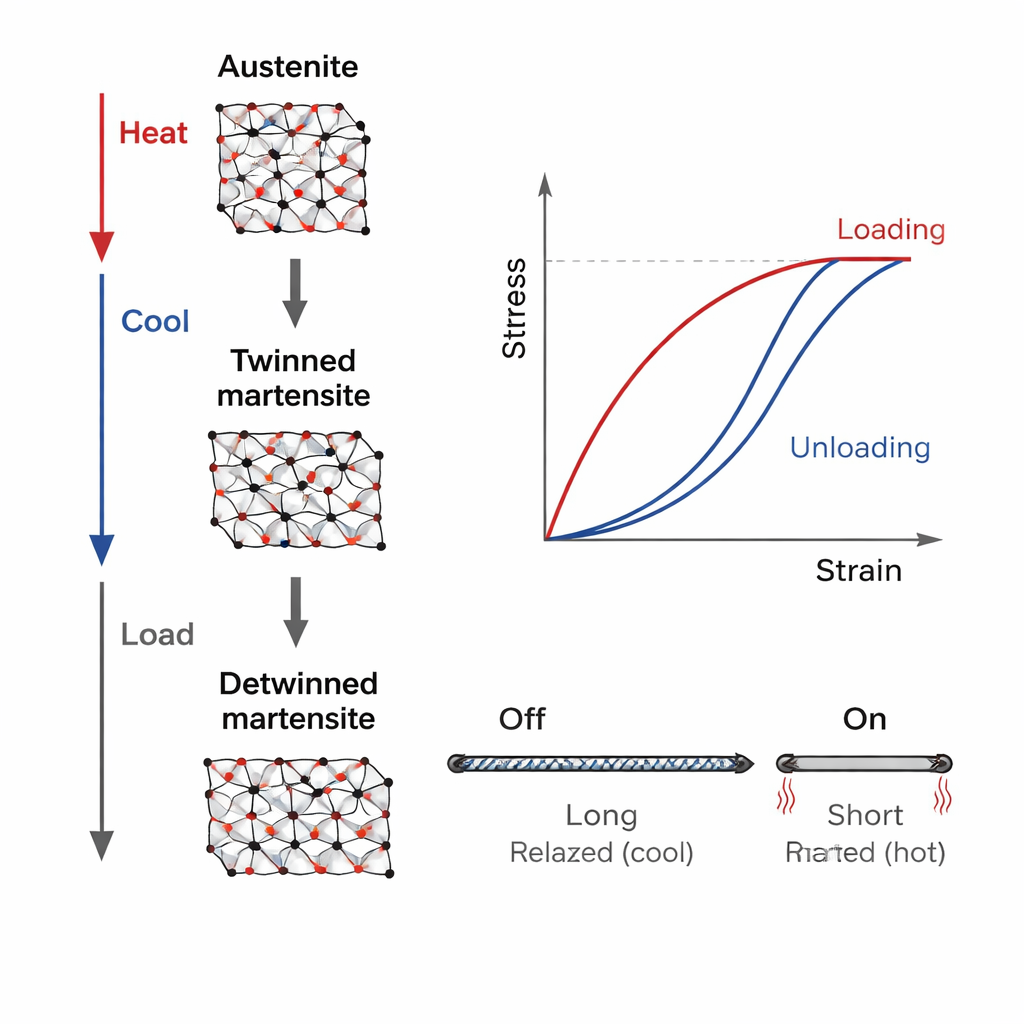
As ligas com memória de forma são metais especiais que podem ser deformados e então retornar a uma forma pré-definida quando sua temperatura muda. Em um modo, chamado efeito memória de forma, você pode dobrar o fio quando ele está frio e relativamente maleável; ao aquecê-lo, ele volta abruptamente à sua forma original. Em outro modo, a superelasticidade, a liga pode se esticar sob carga e depois retornar quando a carga é removida. Dentro do metal, esse comportamento decorre de transformações de fase sólido–sólido entre arranjos cristalinos diferentes, o que torna sua resposta altamente não linear e um tanto difícil de prever. Como os fios de LMF são finos, os engenheiros podem geralmente tratá-los como elementos unidimensionais, simplificando os modelos matemáticos que descrevem como temperatura, tensão, deformação e corrente elétrica estão interligadas.
De Equações a Modelos Orientados por Dados
Para usar esses fios inteligentes de maneira confiável, os projetistas precisam de modelos que prevejam quão forte eles podem puxar, o quanto se deslocam, quão quentes ficam e como sua resistência elétrica muda. Modelos constitutivos clássicos tratam o fio como um material macroscópico e acompanham como suas fases internas mudam com tensão e temperatura. Esses modelos são eficientes, mas dependem de simplificações. Em paralelo, pesquisadores usam cada vez mais aprendizado de máquina e redes neurais para aprender o comportamento do fio diretamente a partir de dados experimentais, capturando histerese sutil e efeitos de história. Outra linha importante de trabalho examina como a resistência elétrica e a temperatura do fio evoluem durante o aquecimento por corrente, possibilitando auto-sensoriamento — a capacidade de estimar força ou movimento apenas medindo a resistência em vez de adicionar sensores separados.
Construindo Movimento: Cargas Simples, Estruturas Suaves e Músculos Artificiais
No lado do hardware, o artigo organiza os atuadores em fio de LMF pela forma como são carregados. Nas configurações mais simples de “carga linear”, um fio puxa contra uma mola ou peso para acionar garras ou mecanismos de liberação em espaço. Sistemas mais avançados de “carga não linear” incorporam fios em vigas flexíveis, polímeros macios, têxteis ou estruturas tipo origami para obter grandes movimentos de flexão, robôs rastejantes e luvas exoesqueleto trançadas. Configurações diferenciais usam dois ou mais fios opostos, imitando pares de músculos como bíceps e tríceps, para fornecer movimento rápido e reversível em articulações como cotovelos e tornozelos artificiais. Como um fio de LMF só pode encurtar cerca de 8%, um tema de projeto importante é a amplificação de curso: enrolar fios longos em polias, dispor caminhos curvos, usar estágios modulares deslizantes ou rotativos, ou adotar molas de LMF para alcançar movimentos maiores em espaços restritos.
Ensinando os Fios Inteligentes a Obedecer
Controlar esses atuadores é desafiador porque sua resposta depende tanto da temperatura quanto da história mecânica. O artigo revisa um espectro de estratégias de controle, desde controladores PID clássicos até esquemas mais sofisticados. Abordagens baseadas em modelos usam equações derivadas da física ou modelos de histerese para projetar controladores por modo deslizante e compensadores feedforward que contrabalançam a não linearidade. Controladores com redes neurais e aprendizado por reforço vão além, aprendendo como acionar o fio para movimento preciso sem depender de modelos perfeitos. Ao mesmo tempo, métodos de controle com auto-sensoriamento usam a variação da resistência do fio como sinal de feedback embutido, às vezes combinado com redes neurais, para estimar posição ou força sem sensores externos volumosos.
Usos Reais e Direções Futuras
Atuadores em fio de LMF já acionam garras robóticas suaves, minúsculos robôs rastejantes, asas de aeronaves morfantes, dispositivos de liberação para satélites, bombas e stents implantáveis, envoltórios de assistência cardíaca, vestimentas de compressão, trajes exoesqueléticos e luvas de reabilitação. Em todos esses campos, persistem obstáculos comuns: resfriamento lento e acúmulo de calor, fadiga ao longo de muitos ciclos, complexidade de controle e custo de fabricação. Os autores argumentam que o progresso dependerá da integração de três vertentes: melhores modelos multiescala e aprimorados por dados, projetos estruturais mais inteligentes que combinem LMFs com eletrônica flexível e materiais multifuncionais, e estratégias de controle inteligentes que se adaptem online. Eles envisionam estruturas unificadas de “modelagem–projeto–controle”, apoiadas por gêmeos digitais e aprendizado de máquina, que possam co-otimizar esses aspectos em conjunto. Para o leitor leigo, a mensagem é que esses fios metamórficos estão amadurecendo de curiosidades de laboratório para músculos artificiais práticos, com potencial para remodelar silenciosamente máquinas, dispositivos médicos e sistemas vestíveis nos próximos anos.
Citação: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Palavras-chave: liga com memória de forma, robótica suave, atuadores inteligentes, estruturas morfantes, dispositivos vestíveis