Clear Sky Science · pl
Mózgowo inspirowane probabilistyczne mapowanie zajętości z użyciem wektorowych architektur symbolicznych
Roboty, które widzą świat jako patchwork
Każdy samochód autonomiczny, robot magazynowy czy odkurzacz potrzebuje szybkiego, uproszczonego obrazu otoczenia: co jest stałe, co puste i co wciąż nieznane. Artykuł przedstawia nowy sposób, w jaki roboty mogą budować taki obraz — tzw. mapę siatki zajętości — czerpiąc pomysły z tego, jak mózg może reprezentować informacje, z celem zachowania dokładności map przy znacznie szybszych i bardziej efektywnych obliczeniach.
Przekształcanie surowych sygnałów sensorów w mapę świata
Roboty często używają skanerów laserowych lub innych czujników odległości, aby badać otoczenie podczas ruchu, zbierając chmury punktów wskazujące, gdzie są obiekty, a gdzie przestrzeń jest wolna. Klasyczna technika mapowania siatki zajętości dzieli środowisko na drobne komórki, jak piksele na ekranie, i przypisuje każdej z nich prawdopodobieństwo zajętości. Tradycyjne metody traktują to jako ciężki problem statystyczny, dokładnie śledząc niepewność, ale kosztem dużego zużycia czasu i pamięci. Nowsze metody oparte na sieciach neuronowych są szybsze i potrafią wypełniać luki, ale zachowują się jak czarne skrzynki, mogą być trudne do zaufania w krytycznych zastosowaniach bezpieczeństwa i zwykle wymagają ponownego treningu dla każdego nowego środowiska.
Ścieżka pośrednia inspirowana mózgiem
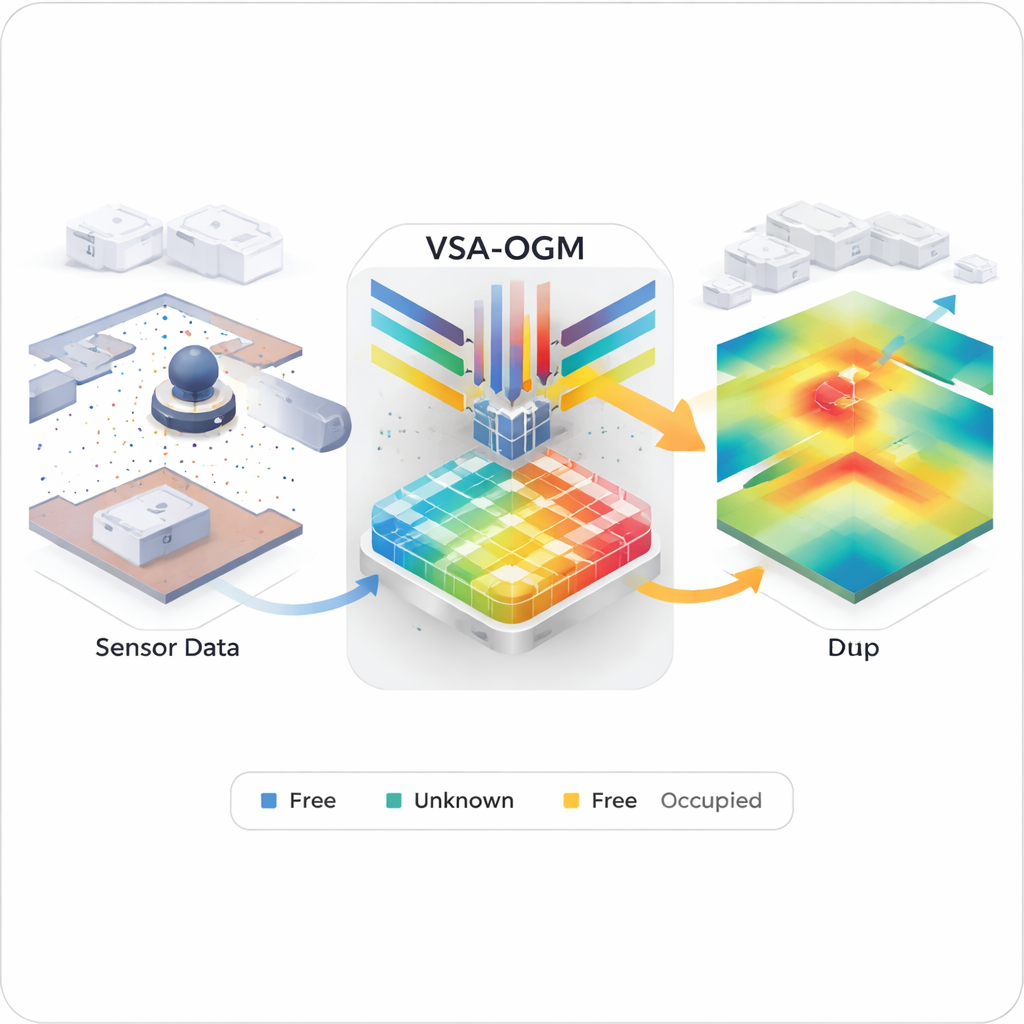
Autorzy proponują „neuro-symboliczny” kompromis nazwany VSA-OGM, skrót od Vector Symbolic Architecture Occupancy Grid Mapping. Zamiast przechowywać każdy szczegół w gęstej siatce lub ukrywać strukturę w milionach wag sieci neuronowej, metoda koduje odczyty sensorów jako bardzo długie wektory w przestrzeni o wysokim wymiarze — matematyczna idea inspirowana teoriami reprezentacji koncepcji i lokalizacji przez grupy neuronów. Środowisko dzieli się na kafelki, z których każdy ma wektorowe pamięci dla dowodów „zajęte” i „puste”. Gdy robot się porusza i zbiera chmury punktów, każde obserwowane zdarzenie jest konwertowane na jeden z tych hiperdimensionalnych wektorów i łączone w odpowiedniej pamięci kafelka, efektywnie kumulując informacje w czasie.
Z hałaśliwych wektorów do czytelnych map
Oczywiście łączenie wielu sygnałów w jednej hiperdimensionalnej pamięci grozi powstaniem hałaśliwej, trudnej do odczytania plamy. VSA-OGM rozwiązuje to za pomocą starannie zaprojektowanego procesu dekodowania. Najpierw porównuje pamięci kafelków z wektorami reprezentującymi pozycje w przestrzeni, generując wstępne „quasi-prawdopodobieństwa” zajętości. Następnie stosuje szereg nieliniowych kroków oraz narzędzie teorii informacji — entropię Shannona — aby wydobyć miejsca, gdzie dane zdecydowanie wspierają jedną klasę nad drugą. W końcu używa funkcji softmax, by przekształcić te sygnały w prawdziwe prawdopodobieństwa i łączy je w ostateczną mapę pokazującą sygnalizowaną różnicę między „zajęte” a „puste”. Efektem jest gładka siatka zajętości, która interpoluje w obszarach rzadko mierzalnych, pozostając jednocześnie w pełni probabilistyczną i interpretowalną.
Szybsze mapy dla jednego robota — lub wielu
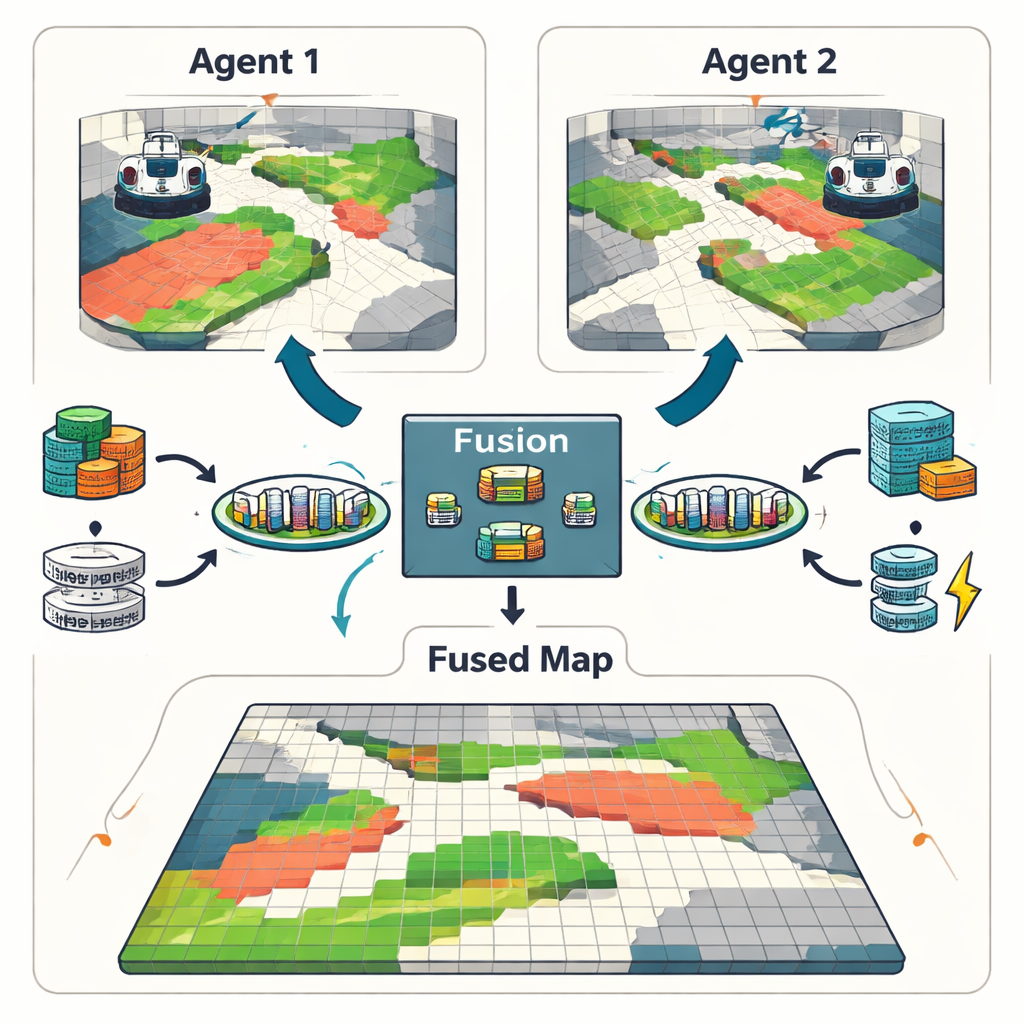
Aby przetestować swoje podejście, badacze uruchomili VSA-OGM na kilku symulowanych i rzeczywistych zestawach danych, w tym klasycznej mapie wnętrza i dużej scenie drogowej. W porównaniu z silnymi tradycyjnymi bazami, które starannie modelują korelacje przestrzenne, VSA-OGM osiągnął podobną dokładność mapowania, lecz zużywał około 400 razy mniej pamięci i działał do 45 razy szybciej. W porównaniu ze zoptymalizowanymi metodami tradycyjnymi, które upraszczają pewne szczegóły statystyczne, nadal dorównywał dokładnością, skracając opóźnienia mniej więcej pięciokrotnie. W zestawieniu z systemem sieci neuronowej wymagającym godzin treningu i milionów parametrów, VSA-OGM dostarczył porównywalnej jakości map bez wstępnego treningu i zmniejszył czas przetwarzania na klatkę nawet sześciokrotnie. Ramy te wspierają także pracę wielu robotów: pamięci wektorowe z różnych agentów można po prostu dodać do siebie, uzyskując zintegrowane mapy z niewielką utratą informacji.
Co to oznacza dla codziennych robotów
Mówiąc prosto, praca ta pokazuje, że roboty nie muszą wybierać między wolną, lecz godną zaufania matematyką a szybkimi, lecz nieprzezroczystymi sieciami neuronowymi przy budowaniu map świata. Dzięki użyciu inspirowanych mózgiem wektorów o wysokim wymiarze, VSA-OGM zachowuje klarowną probabilistyczną strukturę klasycznych metod, osiągając jednocześnie szybkość i efektywność potrzebną do pracy w czasie rzeczywistym na ograniczonym sprzęcie. Wciąż istnieją wyzwania — na przykład obsługa wysoce nieregularnych danych czy bardzo gęstych środowisk — ale podejście to wskazuje kierunek ku przyszłym robotom, które mogą bezpiecznie i niezawodnie rozumieć otoczenie, nawet działając na skromnych komputerach pokładowych.
Cytowanie: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Słowa kluczowe: mapowanie siatki zajętości, roboty autonomiczne, wektorowe architektury symboliczne, mapowanie probabilistyczne, czujniki LiDAR