Clear Sky Science · pl
Dowody behawioralne na hierarchiczne wykonywanie ruchów sekwencyjnych
Jak mózg przekształca proste ruchy w płynne działania
Codzienne czynności, jak pisanie na klawiaturze, granie gamy na pianinie czy sięganie po kilka przedmiotów ze stołu, wydają się bezwysiłkowe. Tymczasem w tle mózg musi połączyć wiele małych ruchów w gładkie, skoordynowane sekwencje. W tym badaniu zadano pozornie proste pytanie: czy mózg zawsze planuje takie łańcuchy działań jako jeden długi ruch, czy też buduje je krok po kroku, korzystając z ukrytej hierarchii mniejszych elementów?
Sięganie po duże cele na stole
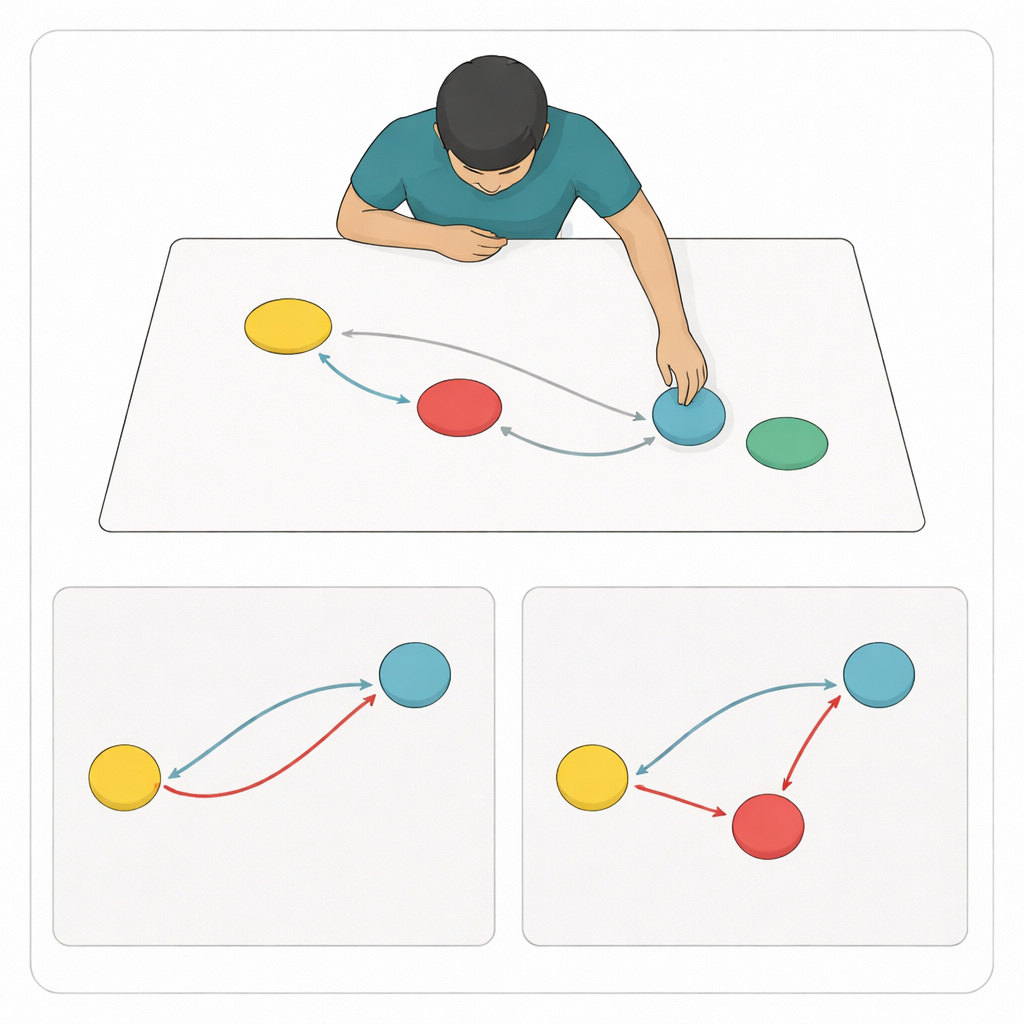
Aby to zbadać, badacze zaprojektowali stołową grę „połącz kropki” dla dłoni. Dwudziestu ochotników siedziało przy stole z kilkoma dużymi kolorowymi okręgami nadrukowanymi na powierzchni. Koło startowe znajdowało się blisko ciała, a inne umieszczono po lewej, prawej i nad nim. W każdym trialu uczestnicy słyszeli dźwięk i musieli przesunąć opuszku palca wskazującego z koła startowego przez krótką sekwencję celów i z powrotem, jak najszybciej, ale bez wyjątkowej precyzji: wystarczyło, by opuszka dotknęła dowolne miejsce wewnątrz każdego koła. Taka niskoprecyzyjna konfiguracja zachęcała do szybkiego i płynnego ruchu, pozwalając ścieżkom zginać się i mieszać między celami zamiast ostrych zatrzymań przy każdym z nich.
Odczytywanie ukrytych planów z krzywizn ruchu dłoni
Zamiast mierzyć jedynie czas wykonania czy częstość błędów, zespół skoncentrował się na dokładnym kształcie każdej ścieżki opuszka. Analizowano dwa kluczowe elementy. Po pierwsze, „zgięcie w połowie drogi”: na ile trajektoria do danego celu odchylała się w stronę następnego celu przed faktycznym dotarciem do pierwszego. Po drugie, „zakręt wokół celu”: jak ostro lub gładko ścieżka zaokrąglała się, mijając cel i zmieniając kierunek. Razem te wzorce ujawniają, czy ruch ku jednemu celowi już uwzględnia następny cel — zjawisko zwane „koartykulacją”, podobne do tego, jak usta kształtują nadchodzące dźwięki podczas mówienia. Naukowcy porównali zmierzone krzywe ze ścieżkami wygenerowanymi przez dwa modele komputerowe planowania ruchu, oba oparte na uznanych teoriach optymalnej kontroli, lecz różniące się wewnętrzną strukturą.
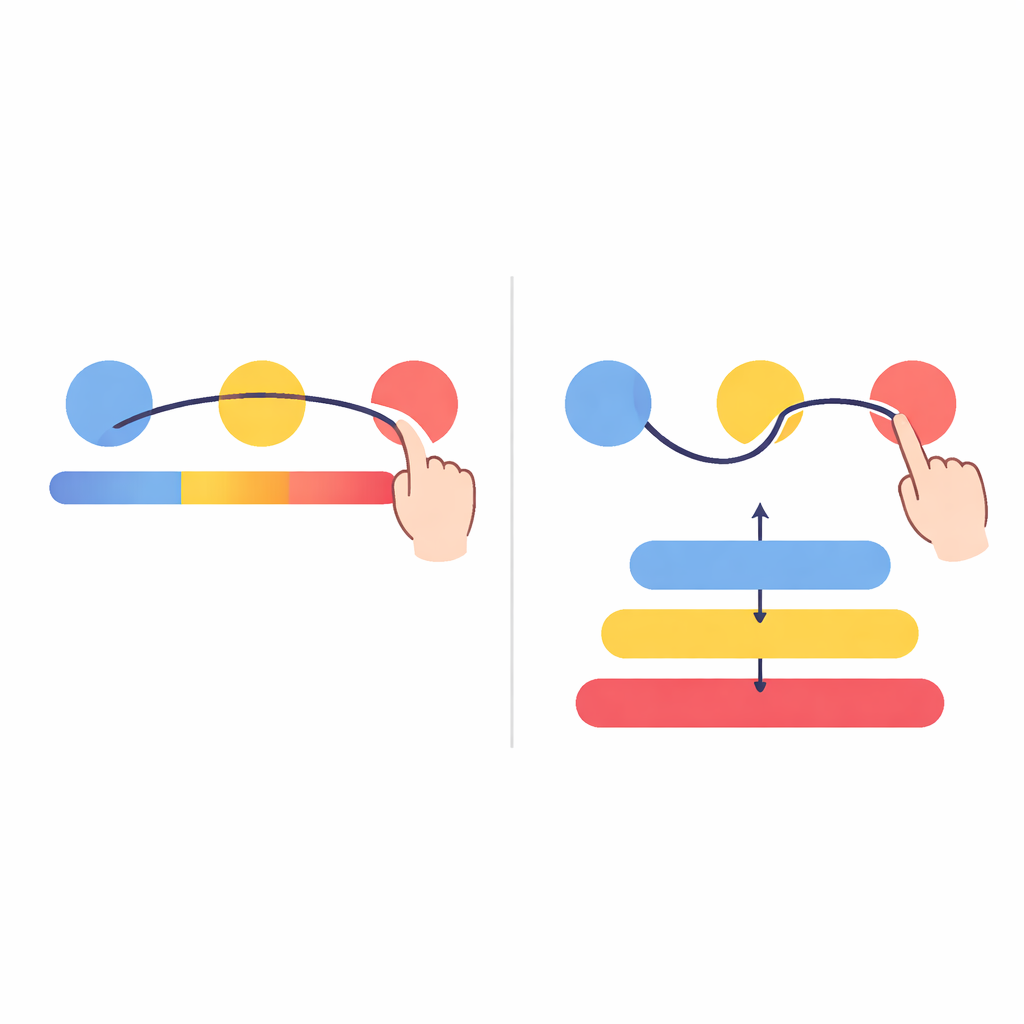
Plany płaskie kontra warstwowe
W modelu „płaskim” wyobraża się, że mózg planuje całą sekwencję trzech celów jako jedną, zintegrowaną trajektorię zanim ręka zacznie się poruszać. Przypomina to w pełni zapamiętany gest lub „porcję” wykonywaną za jednym razem. W tym przypadku zgięcie w połowie drogi i zakręt wokół celów są ściśle powiązane: gdy planer ustali, jak mocno dążyć do pierwszego celu, w dużej mierze determinuje to wygląd krzywych w całej sekwencji. Model „hierarchiczny” natomiast dodaje prostą warstwę pośrednią, która łączy mniejsze fragmenty — na przykład ruch dwu-celowy, a potem powrót do jednego — w czasie rzeczywistym. Osobny układ dynamiczny decyduje, kiedy przełączyć się z jednego podruchu na następny, co pozwala na bardziej niezależne dostosowanie kształtu wokół każdego celu przy jednoczesnym zachowaniu płynności całego ruchu.
Zachowanie przypominające hierarchię
Gdy badacze uruchomili wiele symulacji, okazało się, że model płaski nie potrafił wygenerować pewnych kombinacji zgięcia w połowie drogi i kształtu zakrętu, które ludzie naturalnie produkowali. W szczególności uczestnicy często wykazywali silne odchylenie w stronę drugiego celu w pierwszej części ruchu, a mimo to wykonywali ostry lub inaczej ukształtowany zakręt wokół tego drugiego celu — wzorce, których planer płaski nie był w stanie odtworzyć. Model hierarchiczny potrafił natomiast odtworzyć te mieszane zachowania, dynamicznie łącząc oddzielne „podruchy” przy celach pośrednich. Porównując rzeczywiste dane z obydwoma modelami, autorzy doszli do wniosku, że niemal połowa zarejestrowanych sekwencji ruchów wyraźnie wymagała wyjaśnienia w kategoriach hierarchicznych, podczas gdy inne były zgodne z planowaniem płaskim — co sugeruje, że ludzie elastycznie zmieniają strategię w zależności od sekwencji.
Co to oznacza dla codziennych umiejętności
Wyniki sugerują, że nawet bez długotrwałego treningu czy wysoce wyszkolonych rutyn mózg często polega na planach warstwowych podczas łączenia prostych sięgnięć. Zamiast zawsze kompresować sekwencję do jednego, sztywnego kawałka, układ motoryczny zdaje się trzymać gotowe, wielokrotnego użytku fragmenty ruchu i łączyć je w czasie rzeczywistym. W miarę treningu takie łańcuchy mogą stopniowo zanikać w kierunku bardziej płaskich, w pełni „zchunkowanych” działań, co pomaga wyjaśnić, jak umiejętności stają się szybkie i automatyczne. Ta praca dostarcza nowego, geometrycznego wglądu w to, jak mózg organizuje ruchy, i może nakierować przyszłe badania nad uczeniem motorycznym, rehabilitacją oraz projektowaniem robotów poruszających się z podobną adaptacyjną gracją.
Cytowanie: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Słowa kluczowe: kontrola ruchu, planowanie ruchu, dzielenie na porcje, zachowanie hierarchiczne, sekwencyjne sięganie