Clear Sky Science · pl
Chwytanie przez łamanie: dynamiczne uderzenie umożliwia przewidywalne kotwiczenie robotów do lodu słodkowodnego
Wspinaczka tam, gdzie grawitacji prawie nie ma
Wyobraź sobie wspinanie się po lodowej ścianie, gdzie grawitacja jest tak słaba, że własna masa nie pomaga butom się wgryźć. To wyzwanie stojące przed przyszłymi robotami wysyłanymi na lodowe księżyce, takie jak Enceladus Saturna, gdzie naukowcy chcą przeszukiwać głębokie otwory i jaskinie w lodzie pod kątem śladów życia. Artykuł opisuje nowy sposób, w jaki roboty mogą zaciskać się na lodzie, wykorzystując szybkie, młotkowate uderzenia i mocne zaciskanie — inspirowany czekanami alpinistów. Efekt to lekkie rozwiązanie kotwiczące, które zużywa znacznie mniej siły i energii niż dzisiejsze śruby lodowe czy podgrzewane groty, co może uczynić dotąd niedostępne lodowe światy bardziej osiągalnymi.

Dlaczego trzymanie się lodu jest tak trudne
Na Ziemi wspinacz może oprzeć pełną masę ciała o śrubę lodową lub czekan, aby narzędzie wgryzło się w powierzchnię. Na Enceladusie grawitacja to zaledwie około jednego procenta ziemskiej, więc robot nie może polegać na swojej masie, aby wcisnąć narzędzia w lód. Istniejące opcje mają duże wady. Śruby lodowe wymagają dużych sił nacisku, by zaczęły wniknąć w powierzchnię — tak dużych, że na Enceladusie robot musiałby ważyć tyle, co duży łazik marsjański, aby używać ich skutecznie. Podgrzewane „groty termiczne” mogą wtopić się w lód przy bardzo małym nacisku, ale zużywają ogromne ilości energii za każdym razem, co jest poważnym ograniczeniem dla statków kosmicznych operujących daleko od Słońca. Jednocześnie wiele nowoczesnych robotów wspinaczkowych korzysta z chropowatych formacji skalnych, przyssawek lub specjalnych klejów, z którymi trudno poradzić sobie na gładkich, ale falistych powierzchniach naturalnego lodu lodowcowego.
Zapoznanie się ze sztuczką wspinaczy lodowych
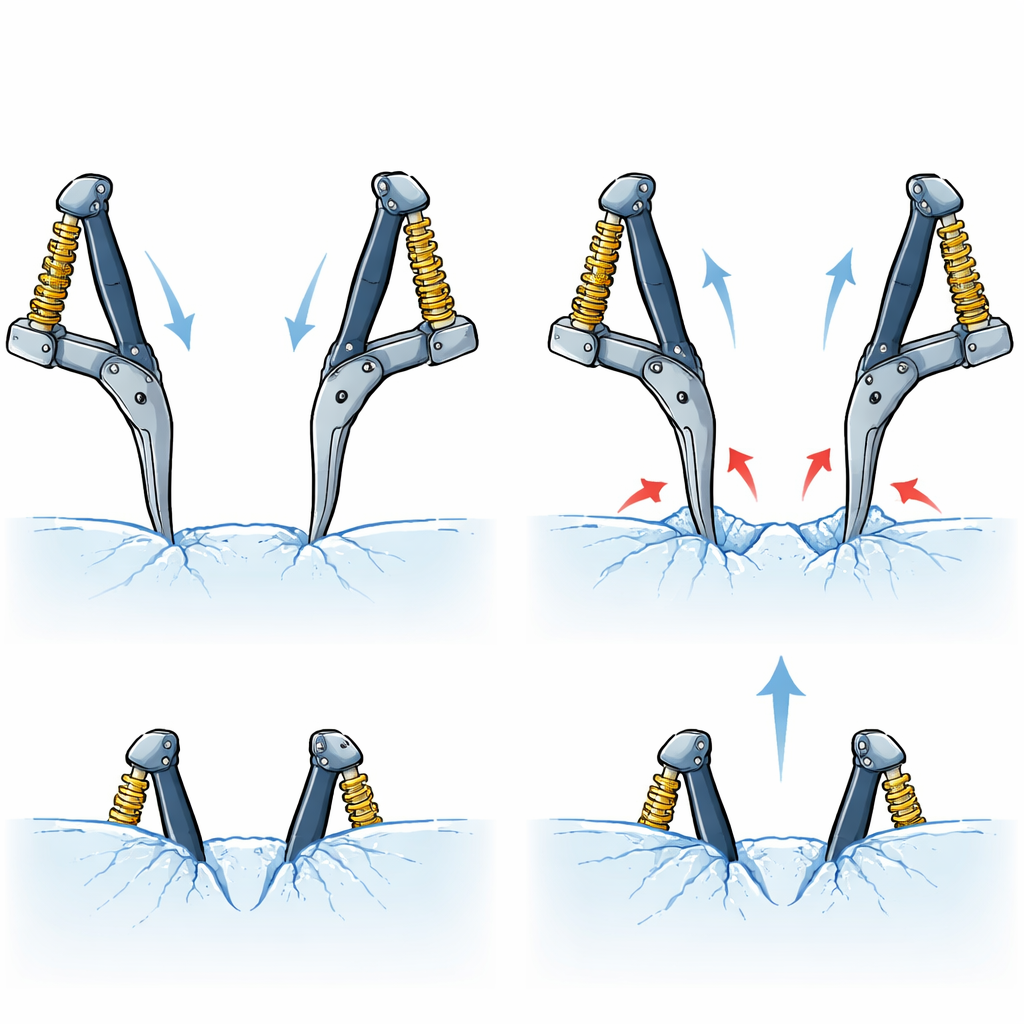
Autorzy proponują inną strategię: zamiast dostosowywać się do powierzchni lodu, stwórz własne punkty chwytu. Urządzenie wykorzystuje dwa małe czekany zamontowane na zwartej szczęce chwytaka. Najpierw sprężyny w ramionach są napinane, magazynując umiarkowaną ilość energii mechanicznej. Po zwolnieniu czekany bujają się jak maleńkie młoty i uderzają w lód, wybierając małe zagłębienia. Następnie ten sam mechanizm ściska czekany ku sobie, tak że ich końcówki zaczepiają się o stworzone wgniecenia. Ten dwustopniowy proces — uderzenie, potem uchwyt — przekształca gładki fragment lodu w coś, czego robot może się trzymać, i można go łatwo odwrócić, by wykonać kolejny „krok”. Cały cykl napędzany jest jednym silnikiem, który zarówno napina sprężyny, jak i zacieśnia chwyt.
Testowanie fizyki chwytu
Aby upewnić się, że podejście zadziała niezawodnie, zespół opracował modele matematyczne przewidujące, jak głęboko końcówki czekanów wnikną i ile mogą się odbić po uderzeniu. Następnie testowali pojedyncze czekany bujające się jak wahadła w bloczki słodkowodnego lodu schłodzone do typowych temperatur lodowcowych. Porównując teorię z eksperymentem, stwierdzili, że modele potrafią przewidzieć, jak głębokie będą zagłębienia i oszacować energię „odrzutu”, gdy czekan się odbija. Na podstawie tych wyników obliczyli, jak mocno robot musi przycisnąć chwytak do lodu przed zamachnięciem, aby czekany pozostały w nowych dołkach zamiast się z nich wysunąć. Dla przyjętej energii sprężyny model przewidywał, że około 16 niutonów nacisku — mniej więcej ciężar paru litrów wody na Ziemi — zapewni prawie pewny sukces.
Od stołu laboratoryjnego do ściany lodowca
Mając modele, badacze przetestowali pełny chwytak z dwoma czekanami. W laboratorium potwierdzili, że uderzenia z energią magazynowaną w sprężynach rzędu 8 dżuli potrafią wytworzyć wystarczająco głębokie dołki przy znacznie mniejszym początkowym nacisku niż śruby lodowe i przy wielokrotnie mniejszym zużyciu energii niż kotwy termiczne. Następnie zmierzyli, jak silny jest końcowy chwyt, odciągając urządzenie prosto z lodu. Regulując, jak mocno czekany są ściskane ku sobie, odkryli dwa tryby zawodności chwytu: przy słabym ścisku końcówki wysuwały się z dołków; przy zbyt silnym ścisku same stopnie lodu odrywały się. Pomiędzy tymi skrajnościami znajdował się optymalny zakres, w którym chwytak mógł utrzymać ponad dwukrotność własnej masy. Testy terenowe na francuskim lodowcu pokazały, że urządzenie może kotwiczyć się na stromym, naturalnym lodzie, ubitym śniegu, a nawet na pniach drzew, skałach i utwardzonym gruncie, potwierdzając, że metoda uderzenie-i-chwyt działa poza laboratorium.
Co to oznacza dla przyszłych odkrywców
Badanie pokazuje, że łamanie i szczypanie lodu może być wysoce efektywnym sposobem, by roboty wspinały się i utrzymywały stabilność w surowych, niskograwitacyjnych środowiskach. Wykorzystując fakt, że pękanie lodu wymaga znacznie mniej energii niż jego topienie, chwytak z dwoma czekanami tworzy silne, odwracalne kotwy przy użyciu umiarkowanych sił i zaledwie kilku dżuli energii na krok. Dla misji na Enceladusa lub inne lodowe światy takie rozwiązanie mogłoby pozwolić małym, ograniczonym energetycznie robotom bezpiecznie schodzić do otworów wentylacyjnych lub wieszać się na ścianach klifów, pobierając próbki, które mogą ujawnić, czy życie istnieje poza Ziemią. Ten sam pomysł mógłby także pomóc robotom na Ziemi badać lodowce, lodowe jaskinie oraz kruche ściany skalne zbyt niebezpieczne lub niedostępne dla ludzkich wspinaczy.
Cytowanie: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Słowa kluczowe: robotyczne wspinaczki lodowe, badania planetarne, robotyczne chwytaki, kotwiczenie przez pękanie lodu, misje na Enceladusa